深度解析JUKI设备调试.pdf - 第111页
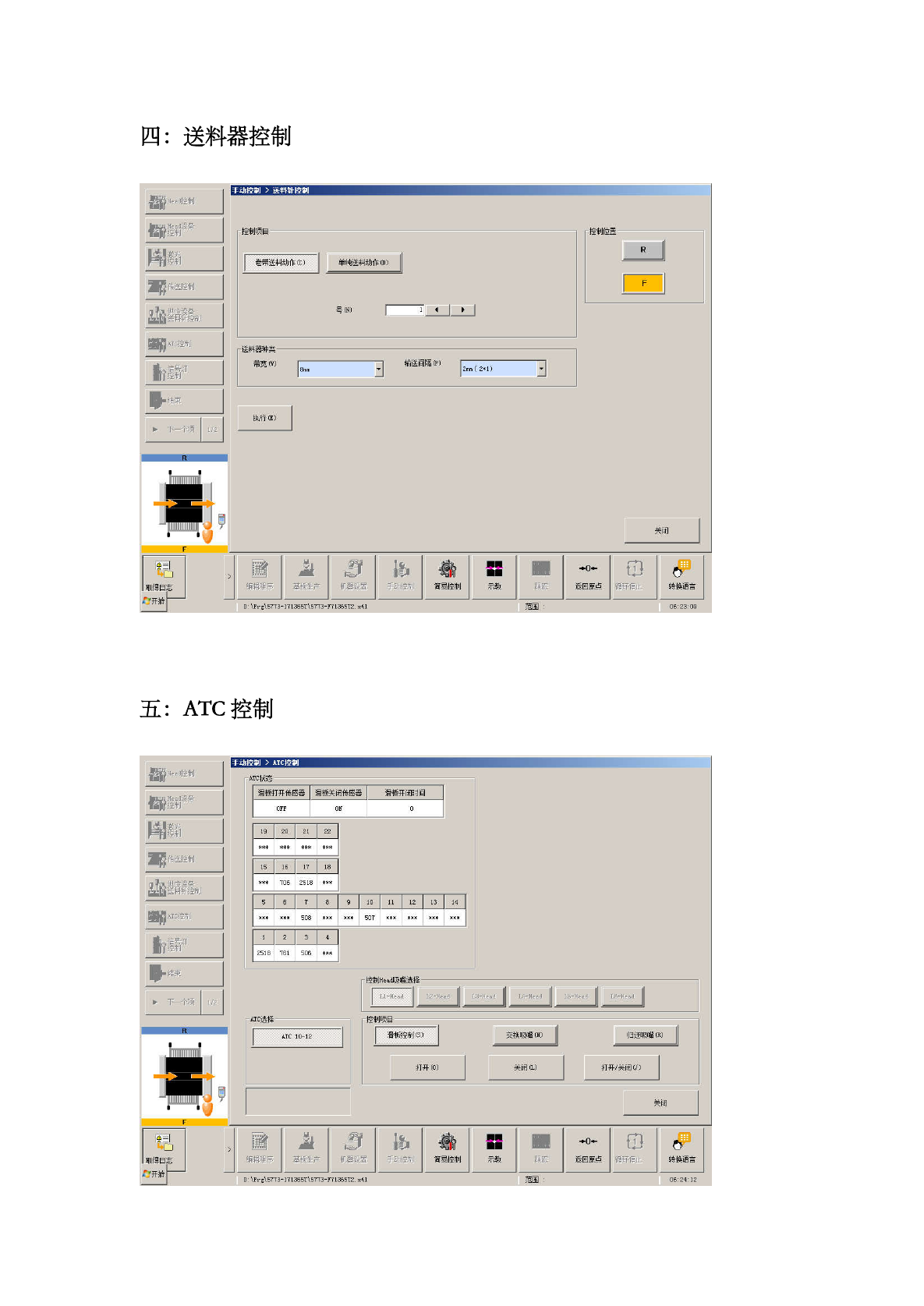
送料器控制 手动控釗 〉 送 《 钋控制 織 JW 控制 控制位 s 控制项目 酬 卷带送料动作 ( c ) 单纯送料动作 00 两传送控制 齡 制 号 Q 0 m : ATC 控制 送料器种类 芾宽 输送间隔 ( P ) | 8 mm if 顧 . . IJ 2 mm ( 2 * 1 ) 汍行 a ) ► 下一个顷 1 / 2 关闭 1 il III © > 基板生产 机器设 s 手动控制 编辑程序 简易控釗 示教 觀 遐回原点…

5
)
挡块
机器设
s
手动控制
编辑程序
基板生产
简易控制
示教
m
遐回原点
循环信止
转换语言
范困
:
D
:
\
Prg
\
5773
-
171365
T
\
5773
-
F
71365
T
2
.
x
41
06
:
18
:
30
送料器控制
手动控釗
〉
送
《
钋控制
織
JW
控制
控制位
s
控制项目
酬
卷带送料动作
(
c
)
单纯送料动作
00
两传送控制
齡
制
号
Q
0
m
:
ATC
控制
送料器种类
芾宽
输送间隔
(
P
)
|
8
mm
if
顧
.
.
IJ
2
mm
(
2
*
1
)
汍行
a
)
►
下一个顷
1
/
2
关闭
1
il
III
©
>
基板生产
机器设
s
手动控制
编辑程序
简易控釗
示教
觀
遐回原点
循坏信止
转换语言
取倶曰
P
厂
,
开始
h
范困
:
D
:
\
Prg
\
5773
-
171365
T
\
5773
-
F
71365
T
2
.
x
41
06
:
23
:
09
五
:
ATC
控制
手动控制
〉
MC
控制
翻
JW
控制
ATC
状态
滑板打开传感器滑板关闭传感器
滑板开闭时间
罐
If
备
OFF
0
H
0
懸
22
19
20
21
胃传雖制
15
16
17
18
齡離
I
706
2518
本木
*
5
6
8
9
10
11
12
13
14
m
ATC
控制
508
本本本
507
2
3
4
1
?
17
2518
761
506
控制
HeadD
;
B
皤迭择
II
L
4
Head
M
Ll
-
Head
L
2
-
Head
L
5
-
Head
I
£
-
Head
►
下一个顷
1
/
2
MCI
择
控制项目
滑板控制
S
)
交换吸堪
00
归还吸皤
00
ATC
10
-
12
关闭
CL
)
打开
/
关闭
(
/
)
打开
(
0
)
关闭
^
3
lb
^
S
8
■
©
>
基板生产
机器设罝
手动控制
编辑程序
简易控制
示教
m
遐回原点
循坏信止
转换语言
取得曰
:
r
开始
I
范困
:
D
:
\
Prg
\
5773
-
171365
T
\
5773
-
F
71365
T
2
.
x
41
06
:
24
:
12

六
:
信号灯控制
m
娜
:
.
VffiB
ail
mi
m
-
幽
.
.
.
絲
istwe
I
II
a
)
J
*
«
)
«
«
a
<
zi
鯽
(
!
)
晰
•
>
,
«
tJIF
'
aa
m
2
k
3
\
b
^
a
m
Q
-
MV
«
»
(
9
,
d
wkmn
m
0
\
»
r
*
\
5
TT
>
lT
138
ST
\
5
m
-
m
365
n
<
41
七
:
送料针控制
KI
3
手动拎制
2
<
1
為妒
侧
文件
g
>
B
示
(
V
)
H
^
-
KD
)
传送系
g
)
Sft
(
g
)
供
62
设
gg
)
苒他
⑸
刼助
00
^
1
itt
~
r
MTS
銷
Hi
Jj
通鳙
M
虛麵
Iw
BI
^
J
*
TC
控釗
+
盖 翊
【
丰
A
l
獻
7
r
&
i
、
_
"
F
—
个侦
1
/
2
F
豳
_
瀟
#
mmm
Y
UP
料计控利
ZS
1