深度解析JUKI设备调试.pdf - 第35页
变换线和激光高度 说明 激光高度适当 。 取得的元件形状正确 。 取得形状后 , 激光传感器返回 SWEEP 识别结果 。 2 < J 鼷識祖疆驪議效 是 on S « 单独测量时提示以上信息 , 选择 “ NO ” 若选择是 , 元件封装尺寸龄炫生变化 , 在元件被 放回时会转角度 ( 未按照原来角度方向放置 ) ① 贴装转角度异常 案例 1 三角形识别的形状若某个方向无直角边 , 则会造成识别时转角度 , 需在贴装角度中补加角…
1
>
濰克校
I
*
心通
ISSirSH
>
孿
》
1
元
ft
«
5
9
幼
z
_
.
WW
元传
.
把元竹
獪蹩校
iEJW
.
S
#
号
台架
插入元件
fli
雜
包装
Ptt
«
行
*
光
ki
"
贼号
怜事擊轉天忾遵餐的沿錄
,
I
霣
M
?
4
边嫌
ft
麗对
AK
光雍嫌
1133172
^
断雜酿麵搬
餅
讀
H
aw
-
.
擘轉务个鑷
*
的切
》
数氰
.
-
10.60
,
》
)
6
.
rUJMtm
.
,
縱
10
分析元
ft
的
,
嫩翬
现汽机
、
P
滞尺寸
17
麵
Pn
#
S
8
.
i
.
r
=
-
<
x
方和
:
《
c
v
:
gSttso
荦
S
衊
SftfStt
(
F
5
)
獅元件昨
)
Zoom
IN
Zoom
OUT
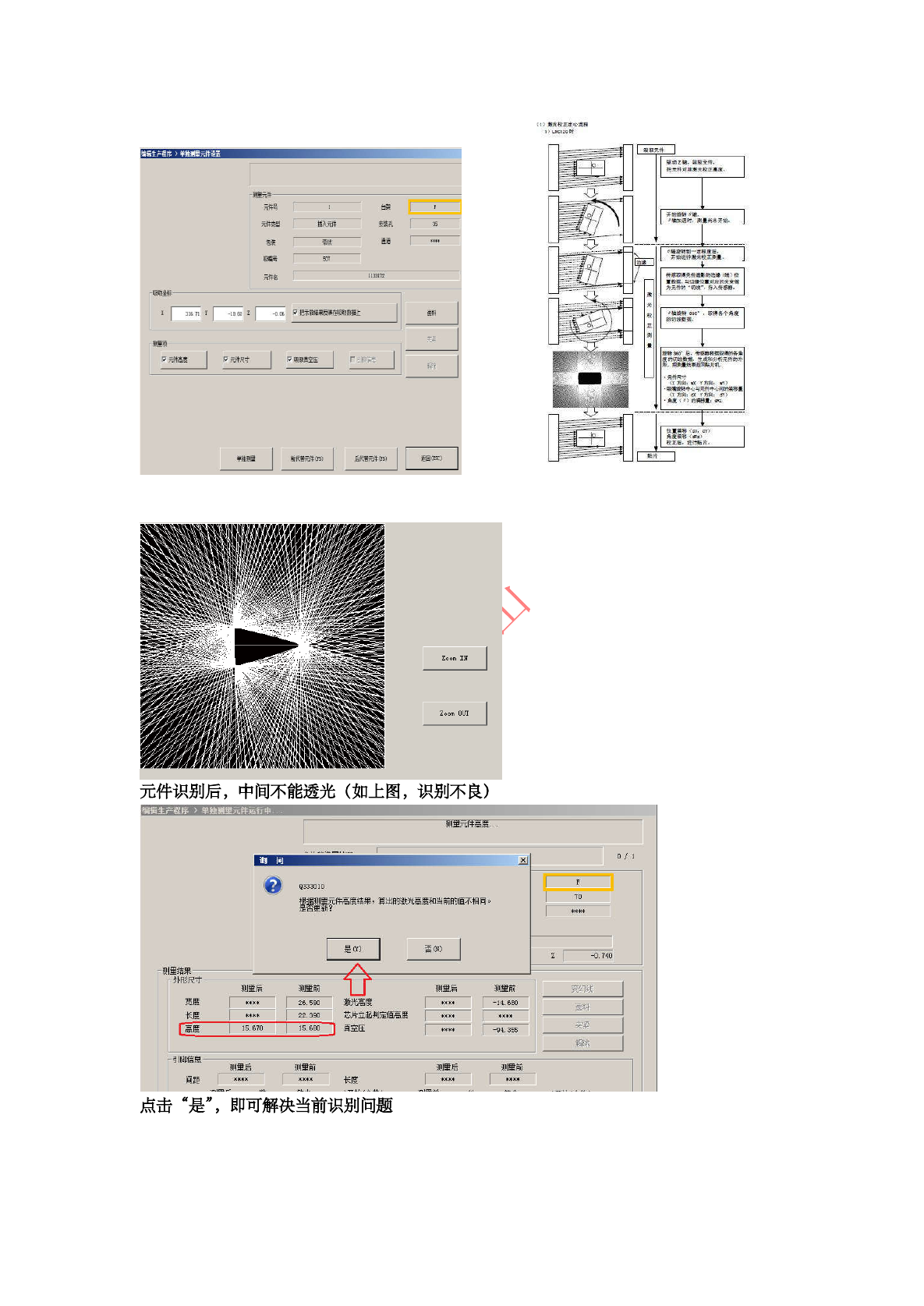
元件识别后
,
中间不能透光
(
如上图
,
识别不良
)
|
编辑生产程序
>
单
屋元件运行中
则望元件高度
.
.
XJ
Q
333010
70
件高度结果
,
茸出的激光高度和当前的值不相同
。
否
⑻
是
00
-
0.740
舍
麵溫寸
则置前
删望后
现埋前
则里后
变幻线
宽度
澉光高度
芯片立起判定值高度
〕
真空压
-
14.680
送料
长度
22.390
实紧
[
mm
15
.
670
15
.
680
-
94.355
解除
引柳信息
刻里后
删里前
则里后
蒯里前
间距
长度
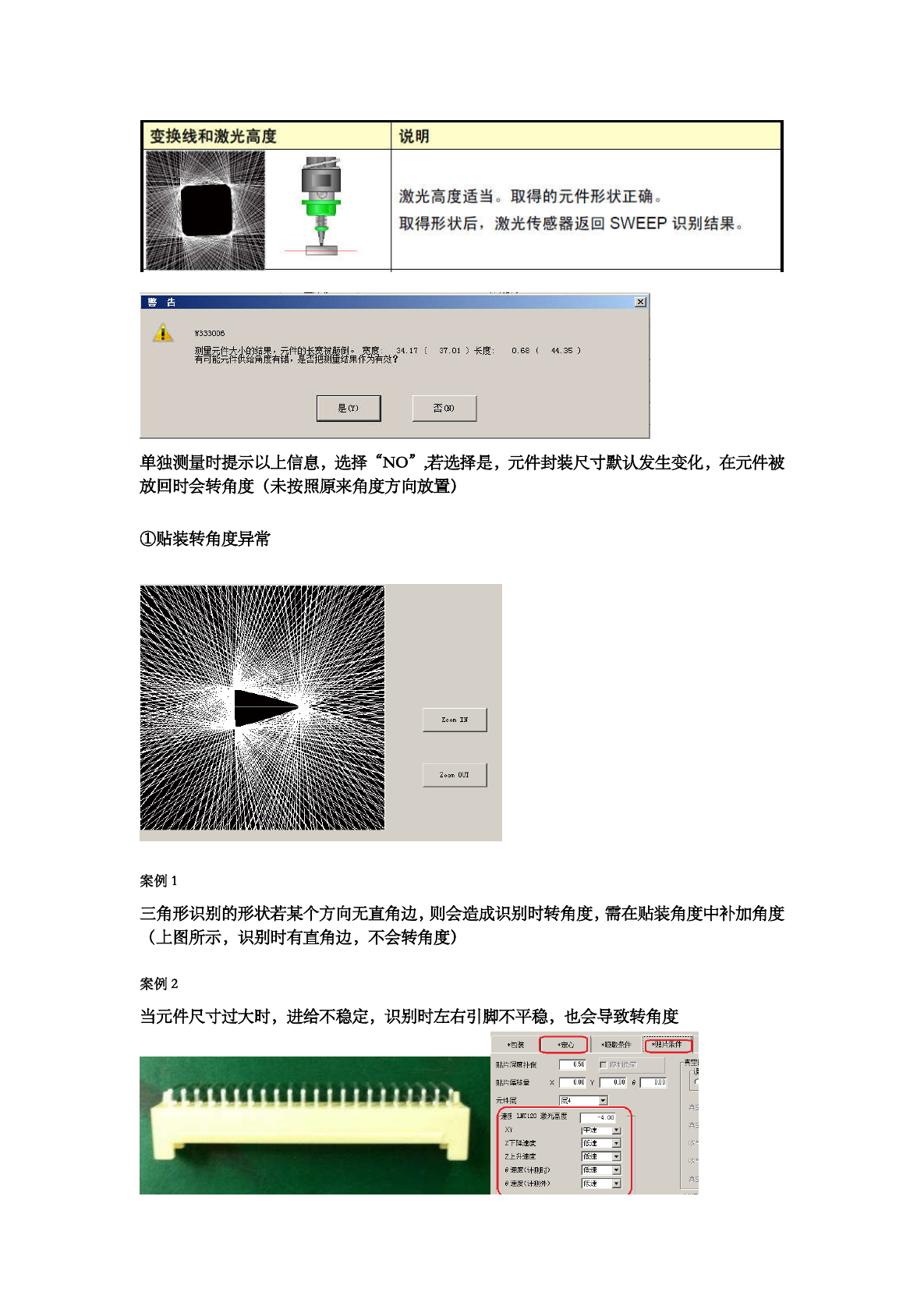
点击
“
是
”
,
即可解决当前识别问题
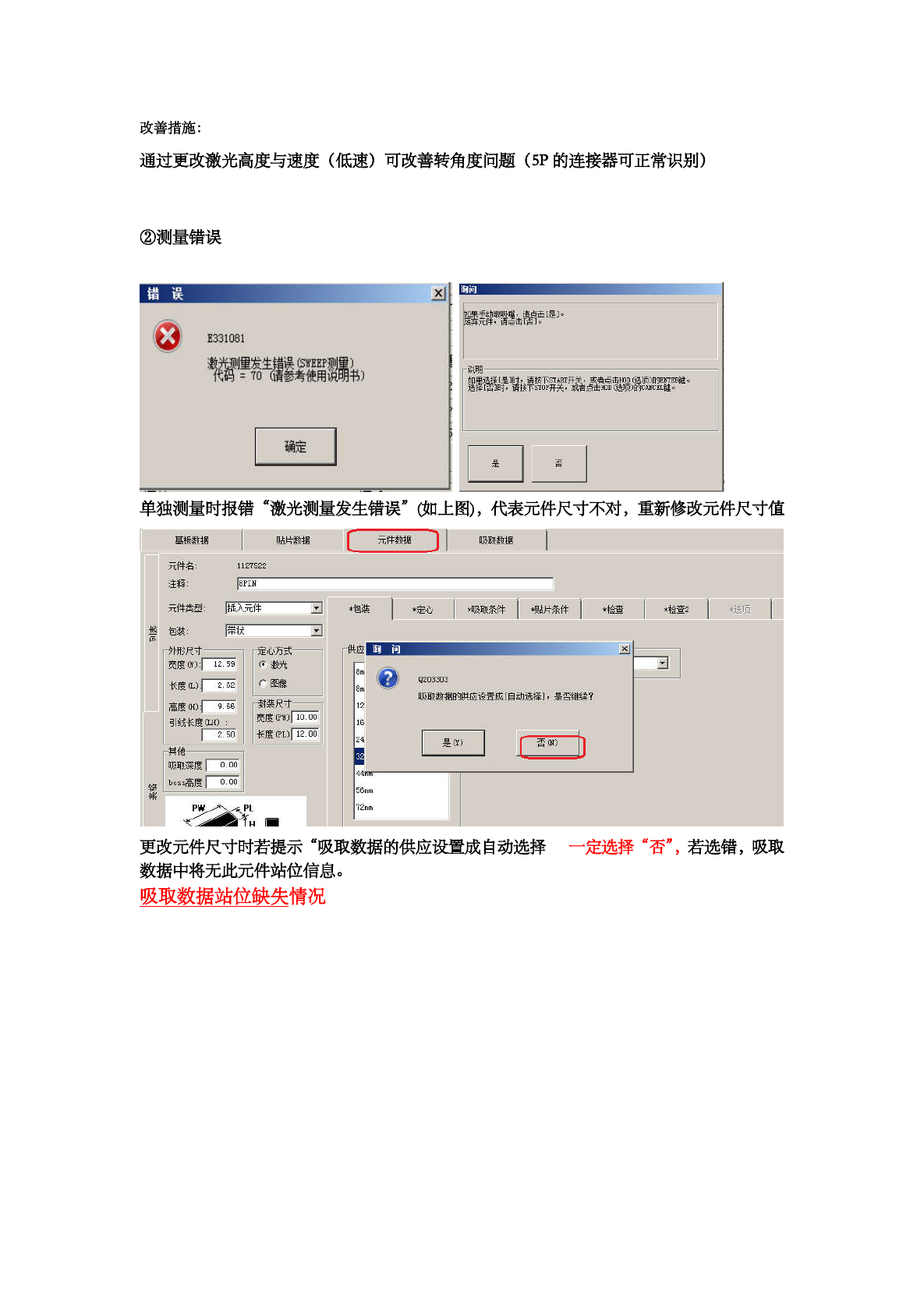
变换线和激光高度
说明
激光高度适当
。
取得的元件形状正确
。
取得形状后
,
激光传感器返回
SWEEP
识别结果
。
2
<
J
鼷識祖疆驪議效
是
on
S
«
单独测量时提示以上信息
,
选择
“
NO
”
若选择是
,
元件封装尺寸龄炫生变化
,
在元件被
放回时会转角度
(
未按照原来角度方向放置
)
①
贴装转角度异常
案例
1
三角形识别的形状若某个方向无直角边
,
则会造成识别时转角度
,
需在贴装角度中补加角度
(
上图所示
,
识别时有直角边
,
不会转角度
)
案例
2
当元件尺寸过大时
,
进给不稳定
,
识别时左右引脚不平稳
,
也会导致转角度
〕
1
^
3
I
050
x
|
o
!
oo
Y
|
o
!
oo
9
|
o
!
oo
IR
”,
改善措施
:
通过更改激光高度与速度
(
低速
)
可改善转角度问题
(
5
P
的连接器可正常识别
)
②
测量错误
xJ
_
?
麵
1
?
[
是
]
。
0
E
331081
鱺 繼 駿
|
)
?
。
堪
。
确 定
“
激光测量发生错误
”
洳上图
)
,
代表元件尺寸不对
,
重新修改元件尺寸值
单独测量时报错
]
|
元件教掮
贴片教掮
吸取數掮
元件名
:
|
8
PIH
亓件类型
:
1
插入元件
*
吸取条件
*
贴片条件
*
定心
*
縫
2
[
15
F
1
]
x
]
外形尺寸
——
宽度
Of
)
:
|
12.59
长度叫
J
"
"
"
212
(
高度
㈤
)
~
916
引线长度
CLH
)
:
$
心方式
-
3
E
©
吸取數据的供应设置成
[
自动迭择
]
,
是否继续
?
省装尺寸
宽度
⑽
长度
(
PL
)
|
12.00
|
是
⑴
|
吸取深度
|
0.00
高度
|
0
00
更改元件尺寸时若提示
“
吸取数据的供应體成自动选择一趟择
“
否
'
若选错
,
吸取
数据中将无此元件站位信息
。
吸取数据站位缺失情况