深度解析JUKI设备调试.pdf - 第107页
2 ) 马达 手动控 》 > 传隹控制 觀 W 控制 He ad 设备 控制 鲫 酬 胃讎空制 齡 制 醒函 ] 信号 j 挡块 支槿台 墓板传送 崛 马达 ATC 控制 马达迭择 | _ 灯 OFF OFF OFF 入口马达 cr ) 中心马达 cr ) 出口马达 00 ► 下一个项 1 / 2 旋转方向 正转 00 逆转 00 0 HC 0 ) 0 FFU ) OH / OFF ( J ) 关闭 F ■ il 0 \ h …
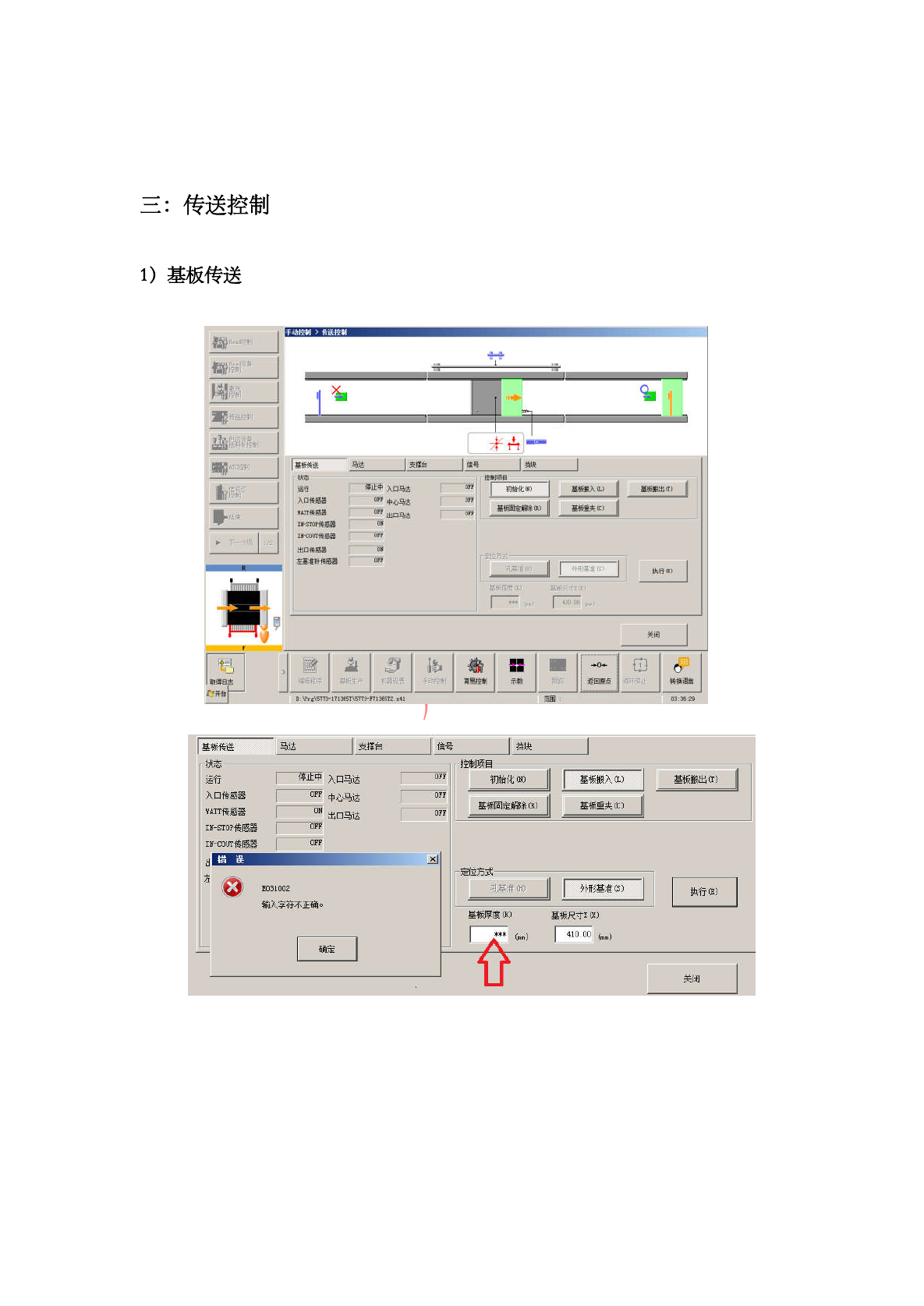
报警“输入字符不正确”,未设定基板厚度,输入 1.6MM 问题解决
三
:
传送控制
1
)
基板传送
撖
.
m
=
1
V
4
%
禪祖抄
J
1
1
m
|
支
ffa
降
CTJ
_
m
簿
it
中
xt
^
达
中心马达
出
□
马达
y
Wl
«
ta
)
MMiA
(
L
>
K
«
搬出
<
71
tan
入
cmss
«
n
俺
aa
夹
。
u
-
cour
#
A
3
出
Q
務
»
8
左
矜传
®
»
柳晷
;
f
Hiflo
)
JT
k
3
lb
痳
R
■
Q
m
两财
i
尨回蒙点
«
供〒
ffftt
—
~
SB
|
支搭台
Jj
!
i
|
挡块
|
基板传送
马达
状态
控制项目
I
入口马达
中心马达
出口马达
^
FF
运行
初始化
00
基板搬入
CL
)
基板搬出
CT
)
入口传感器
■
传感器
IN
-
ST
0
F
传感器
「
IN
-
C
0
UT
传感器
OFF
OFF
基板固定解除
00
基板重夹
(
C
)
0
N
^
FF
OFF
OFF
xj
dllij
定位方式
s
o
孔基准
00
外形基
ICS
)
E
031002
汍行
CE
)
输入宇符不正确
。
基板厚度
00
基板尺寸
XOO
*
**
U
)
^
r
~
410
00
U
)
确定
关闭

2
)
马达
手动控
》
>
传隹控制
觀
W
控制
He
ad
设备
控制
鲫
酬
胃讎空制
齡
制
醒函
]
信号
j
挡块
支槿台
墓板传送
崛
马达
ATC
控制
马达迭择
|
_
灯
OFF OFF
OFF
入口马达
cr
)
中心马达
cr
)
出口马达
00
►
下一个项
1
/
2
旋转方向
正转
00
逆转
00
0
HC
0
)
0
FFU
)
OH
/
OFF
(
J
)
关闭
F
■
il
0
\
h
>
机器设
s
手动控制
循砰信止
编辑程序
基板生产
简易控制
示教
返回原点
转换语言
取得日志
范困
:
D
:
\
Prg
\
5773
-
171365
T
\
5773
-
F
71365
T
2
.
x
41
06
:
15
:
07

3
)
支撑台
手动控制
>
传送控制
織
Jnea
啦制
■
fy
#
Kead
设备
鲫
控制
!
爾传送麵
齡
制
j
马达
j
挡块
基板传送
信号
m
支胎
ATC
控制
状态
控制项目
灯
0.00
移动目的坐标
(
±
)
0
N
支搐台原点传感器
gfililil
左支探台
(
L
)
结束
►
下一个项
1
/
2
上
GO
上
/
下
⑺
下
CD
)
J
9
关闭
m
Ji
lh
©
H
>
编辑程序
基板生产
机器设罝
手动控制
循环信止
简易控制
示教
返回原点
转换语言
范困
:
D
:
VPrg
\
5
T
73
-
171365
T
\
5773
-
FT
1365
T
2
.
x
41
-
52.00
-
0.00
06
:
16
:
17