深度解析JUKI设备调试.pdf - 第24页
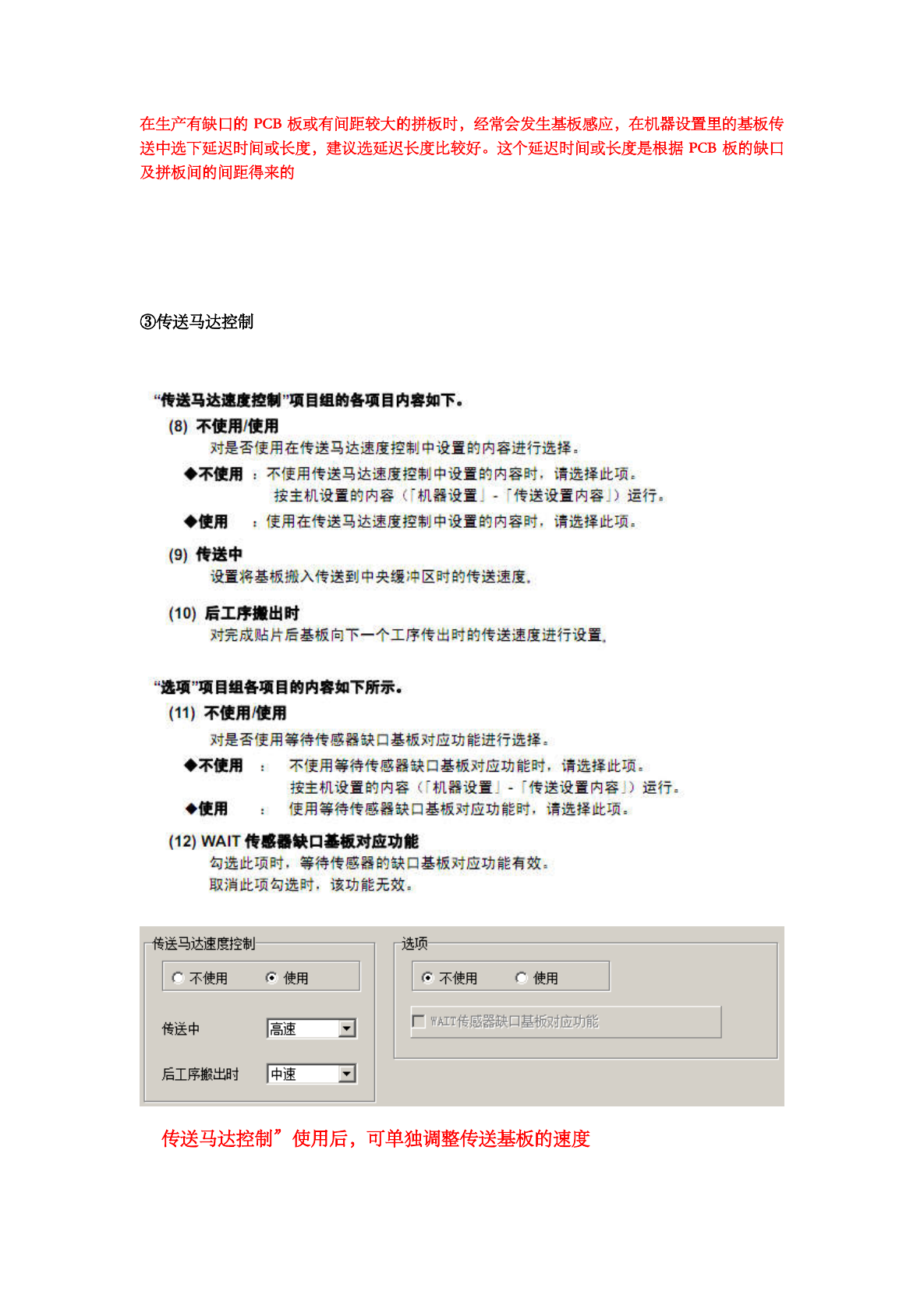
“ PCB 板或有间距较大的拼板时 , 经常会发生基板感应 , 在机器设置里的基板传 送中选下延迟时间或长度 , 建议选延迟长度比较好 。 这个延迟时间或长度是根据 PCB 板的缺口 及拼板间的间距得来的 ③ 鶴马达控制 “ 传进马达速度控项目组的备项目内实如下 * ( 8 ) 不使用 / 使用 对 是 否 使 用 在 传 送 马 达 速 度 控 制 P 设 罝 的 内 吞 进 行 选 择 = X 使 用 传 送 马 迖 速 度 控 制…
①
传送基本體
注意
:
延迟单位
-
时间
-
选项
-
时间设定不能太长
,
若数值太大
,
会造成基板未走到停板位置
,
工作台就上升的情况发生
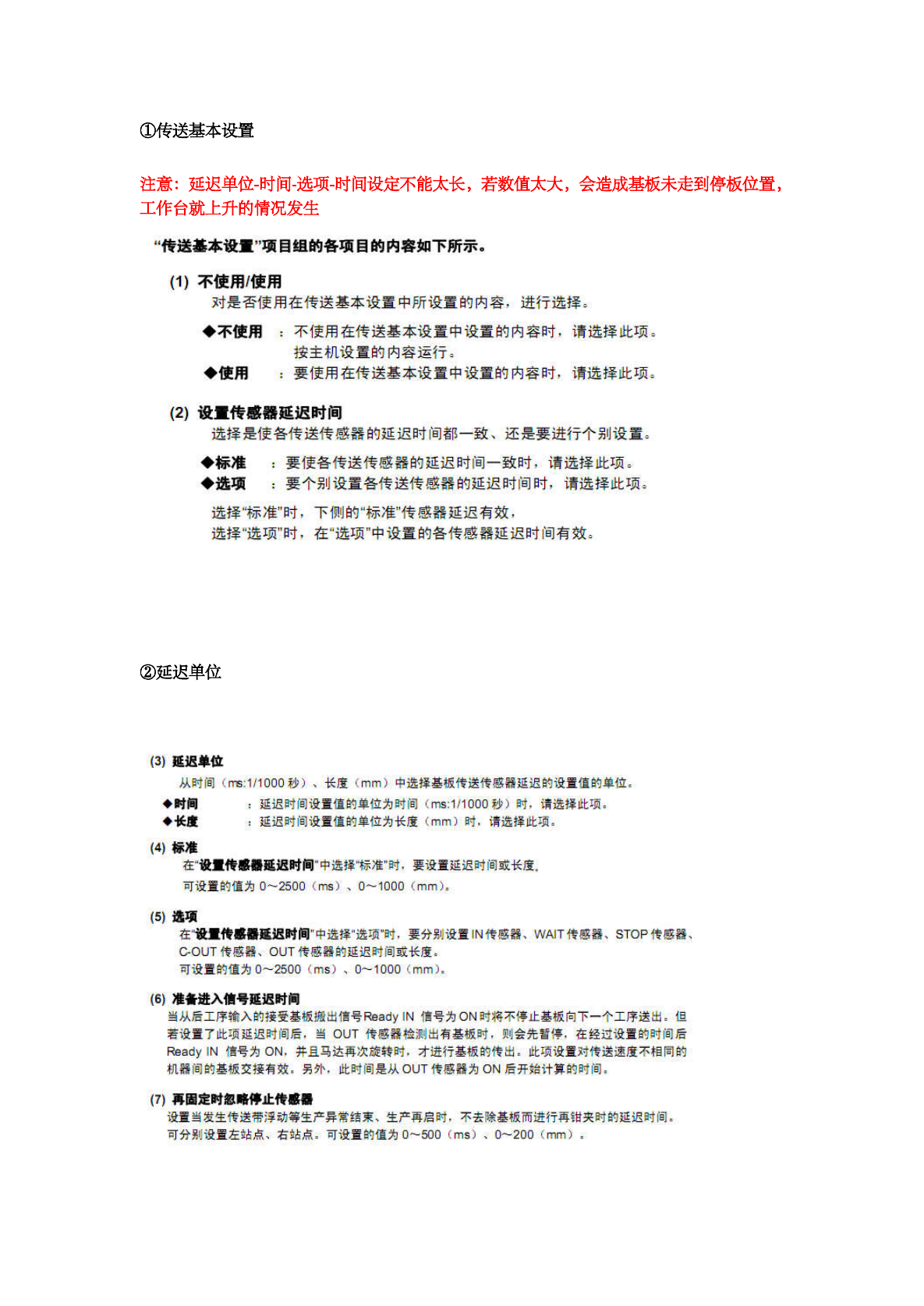
传送基本设置
”
项目组的各项目的内容如下所示
。
(
1
)
不使用
/
使用
对是否使用在传送基本设置中所设置的内容
,
进行选择
:
:
不使用在传送基本设置中设置的内容时
,
请选择此项
=
按主机设置的内容运行
。
:
要使用在传送基本设置中设置的内容时
.
请选择此项
=
(
2
)
设置传感器延迟时间
选择是使各传送传感器的延迟时间都一致
、
还是要进行个别设置
3
:
要使各传送传感器的延迟时间一致时
,
请选择此项
。
:
要个别设置各传送传感器的延迟时间时
,
请选择此项
。
选择
“
标准
”
时
,
下侧的
“
标准
”
传感器延迟有效
,
选择
“
选项
”
时
,
在
“
选项
”
中设置的各传感器延迟时间有效
。
②
延迟单位
(
3
)
延迟单位
从时间
(
ms
:
1
/
1000
秒
)
、
长度
(
mm
)
中选择基板传送传感器延迟的设置值的单位
6
:
延迟时间设置值的单位为时间
(
ms
:
1
/
1000
秒
)
时
,
请选择此项
《
:
延迟时间设置值的单位为长度
(
mm
)
时
.
请选择此项
s
H
(
4
)
标准
在
“
设置传感迟时间选择
“
标准
"
时
.
要设置延迟时间或长度
.
可设置的值为
0
2500
(
ms
)
、
0
1000
(
mm
)
8
(
5
)
选項
在
“
设置传感鼉蠹迟时间
"
a
选择
"
选项
"
时
.
要分别设置
IN
传感器
、
WAIT
传感器
、
STOP
传感器
、
OOUT
传感器
、
OUT
传感器的延迟时间或长度
:
可设置的值为
0
2500
(
ms
)
、
0
1000
(
mm
)
8
(
6
)
准进入倌号延迟时
B
当从后工序输入的接受基板搬出倌号
Ready
IN
倌号为
ON
时将不停止基板向下一个工序送出
s
但
若设置了此项延迟时间后
.
当
OUT
传感器检测出有基板时
.
则会先暂濘
.
在经过设置的时间后
Ready
IN
倌号为
ON
.
并且马达再次旋转时
.
才进行基板的传出
=
此项设置对传送速度不相同的
机器间的基板交接有效
=
另外
.
此时间是从
OUT
传感器为
ON
后开始计算的时间
:
(
7
)
再固定时忽略
4
*
止传
设置当发生传送带浮动等生产异営结束
、
生产再启时
.
不去除基板而进行再钳夹时的延迟时间
=
可分别设置左站点
、
右站点
c
可设置的值为
0
500
(
ms
)
、
0
-
200
(
mm
)
。
“
PCB
板或有间距较大的拼板时
,
经常会发生基板感应
,
在机器设置里的基板传
送中选下延迟时间或长度
,
建议选延迟长度比较好
。
这个延迟时间或长度是根据
PCB
板的缺口
及拼板间的间距得来的
③
鶴马达控制
“
传进马达速度控项目组的备项目内实如下
*
(
8
)
不使用
/
使用
对是否使用在传送马达速度控制
P
设罝的内吞进行选择
=
X
使用传送马迖速度控制中设罝的内容时
.
谞选择此
按主机设
M
的 内 容 厂 机 器 设 罝
-
'
传送设罝内容
)
运行
=
嗤用在传送马达速度控制申设罝的内容时
.
请选择此项
=
(
9
)
传送中
设罝将基板提入传送到中央缓
P
区时的传送速度
.
(
10
)
后工序嫌出时
扣完成贴片后基板向下一个工序传
^
时的传送速度进行设置
,
“
选项目组各项目的内
*
如下所示
,
(
11
)
不使用
/
使用
对是否使用等待传感器缺
2
基板対应功能进行选择
=
:
不使用等待传感器缺口基板对应功能时
.
请选择此项
E
按主机设置的内
s
r
机器设置
-
_
传送设罝内容
_
)
运行
E
:
使用等待传感器缺
□
基板对应功能时
.
请选择此项
=
(
12
)
WAIT
传
薷缺口基板对应功能
勾选此项时
.
等持传感器的缺口基板对应功能有效
=
取消此项勾选时
.
该功能无效
=
传
1
马达速度控制
迭项
r
不使用
(
J
■
使用
^
不使用
r
使用
r
WAIT
传感器缺口基板对应功能
传送中
|
中速
后工序搬出时
传送马达控制
”
使用后
,
可单独调整传送基板的速度
目录
自 动 迭 择 否
否
XS
12
-
2.54
63.94
178.00
1126207
自 动 迭 择 否
否 否
XS
25
-
52.35
17.82
88.00
1126207
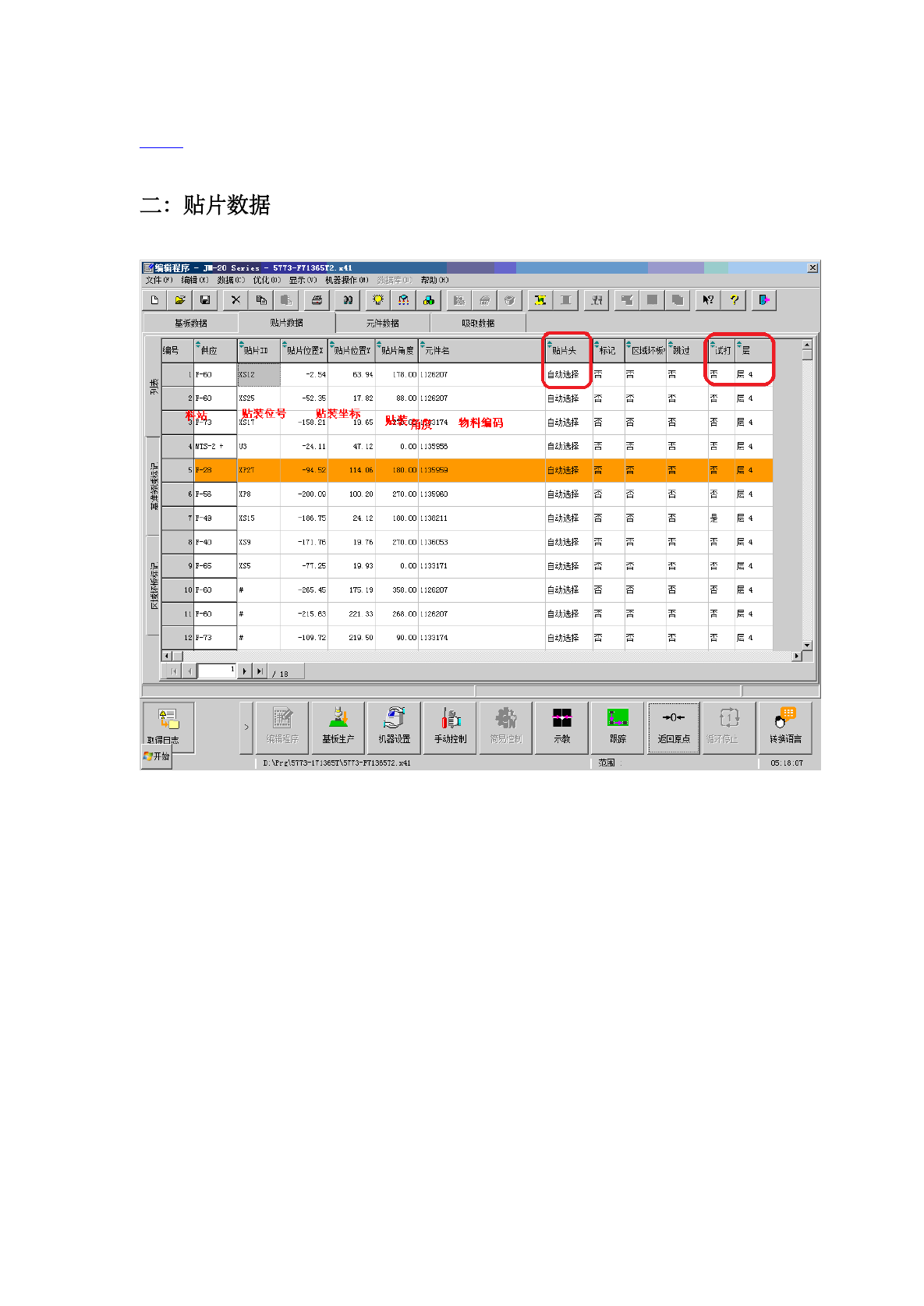
貼装位号
貼装坐标
貼装兜傻
31
T
4
物料编码
自 动 迭 择 否
否
层
4
;
:
―
:
自 动 迭 择 否
否 否 否
层
4
U
3
-
24.11
47
.
12
0.00
1135956
自 动 迭 择 否
否 否 否
层
4
XP
27
-
94.52
114.06
180.00
1135959
自动迭择
否 否 否 否
层
4
XP
8
100.20
270.00
1135960
自动迭择
否 否 否
XS
15
-
186.75
24.12
180.00
1138211
自动迭择
否
否
否
-
171.76
19.76
270.00
XS
9
1136053
自动迭择
否 否
层
4
XS
5
-
77.25
19.93
0.00
1133171
自动迭择
否 否
层
4
#
175.19
358.00
1126207
自动迭择
否 否 否
层
4
#
-
215
.
63
221.33
268
.
00
1126207
自动迭择
否 否 否
层
4
#
-
109.72
219.50
90.00
1133174
小
1
I
/
18
>
■
2
5
搬 鳓
B
L
o
-
►
0
^
-
编辑程序
基板生产
机器设
S
手动控制
简易控制
示教
跟踪
遐回原点
转换语言
I
05
:
18
:
07
取得曰志
广
?
开始
^
范困
D
:
\
Prg
\
5773
-
171365
T
\
5773
-
F
71365
T
2
.
x
41
二
:
贴片数据
-
5773
-
F
71365
T
2
.
文件
CF
)
编 辑
(
B
)
数 据
(
C
)
优化
(
0
)
g
示
CV
〕
机器操作
(
W
)
數据库
01
)
帮助
00
Q
s
x
%
龜 魯 的
G
免 必 匾
#
,
x
^
%
m
%
^
?
护
贴片教掮
基板教掮
元件教据
吸取教掮
Z
$
5
!
占片位
Sx
$
贴片位
gY
$
贴片角度
$
元件名
贴 片 头 令 标 记 拿
试打二层
谝号
供应
贴片
ID
区域坏板
>
跳过
-
28
10
11
-
^
1
GIIIX
0