深度解析JUKI设备调试.pdf - 第153页
计算机 - 管理 I oo a i 命令提不符 向管理员 : 命令搓示符 . icrosoft Windows [ 版本 6.1 . 7601 ] Copyright < c > 2010 Microsoft Corporation . All rights reserved . 计算机管理 JUKI 画图 p : \ JUKI \ Too Is > log , . 文档 RTX Properties 图片 > …
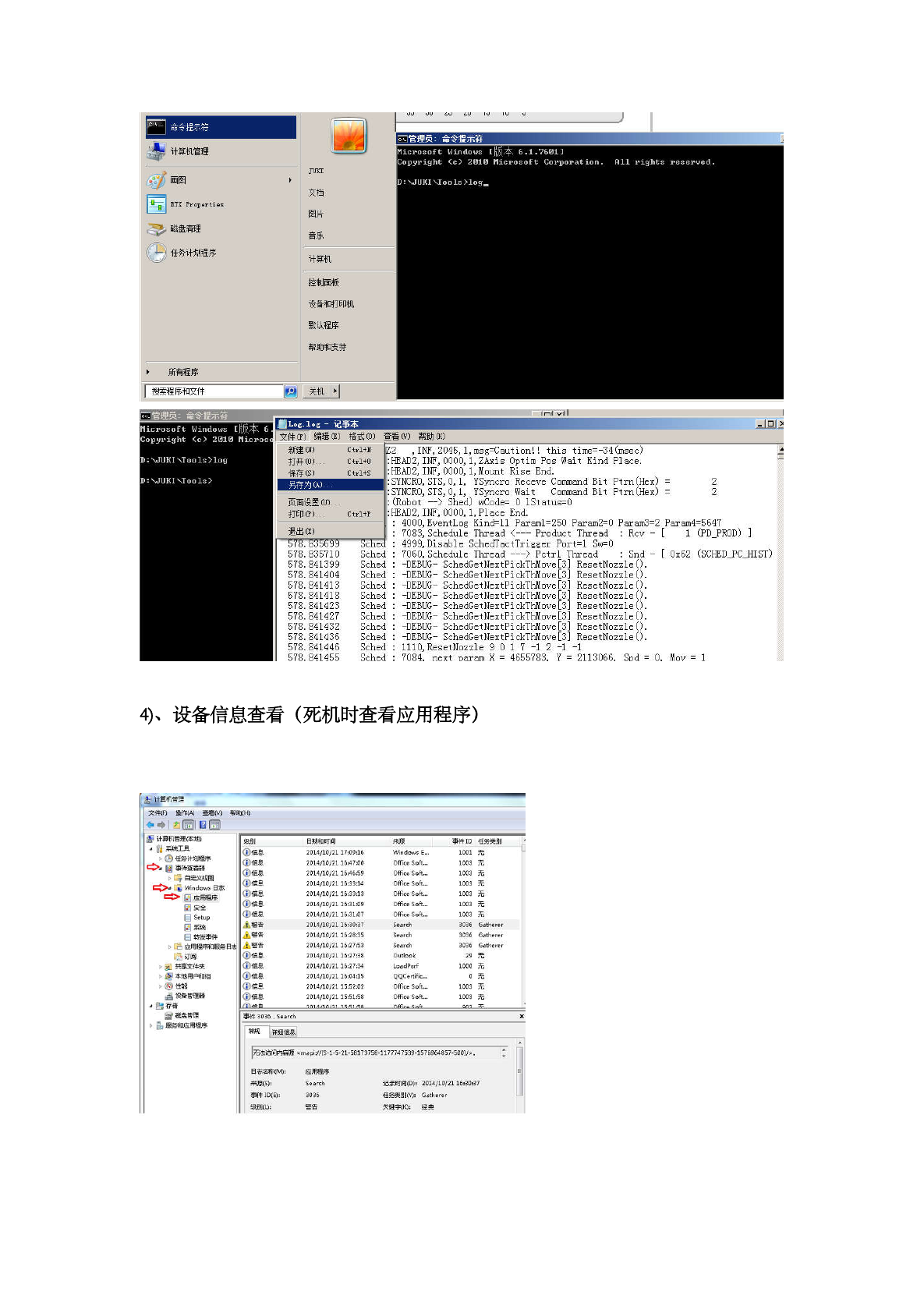
在开始菜单中取点击“命令提示符”, ,设备直接进入取 log 界面,信息取得后,另
存为保存数据。
-
-
J
5
.
I
2
J
.
1
▼
if
蓴机
,
车
«
KlS
0
>
:
)
-
jvn
^
▼
iJOi
\
W
?
!
rrHi
«
LD
5
,
CrrlUil
-
▼
m
-
*
文
(
=
夹
*
>
Jil
1
tt
改
BW
^
ZUVUT
7
~
7
T
k
:
52
S
|
大小
m
-
'
JUJWf
^
J
^
U
舶
碁
*
Flt
■
AS
,
.
lh
6
-
J
,
|
a
-
B
^
S
201
<
0731
jnijy
_
Uli
文件
01
20140601
.
20
H
08
Q
2
)
棚
OK
)
格豸贝
)
S
<
⑺
%
助
00
■
A
面
.
201
<
0603
<
0604
<
06
C
6
<
06
(
C
:
f
K
201
oon
,
因为传送芾碗器作出反
S
不
8
绝行
,
0
Re
«
d
4
-
Axis
Error
Bits
==
=
=
=
=
=
=
=
=
=
=
□
=
0010
|
=
0000
A
A
»
n
,
计
H
扒
iipSYsra
fir
)
Tl
聯
:
■
i
尹秀山
CO
201
201
20140
«
03
C
5
一
mtmn
»
.
20
UM
ead
>
F
wXTAlarnBit
=
00000000
1
邮
坫
:
ill
.
—
-
20
】
201
ooom
絮
s
停止
•
-
0
Red
&
-
Axis
Error
Bits
=
=
=
=
=
=
□
=
0011
=
0000
:
20
K
08
I
4
扫猶
M
20
K
08
I
20
)
<
oei
4
#
«
•
03
CA
2014061
ead
>
F
wX
?
AliirnBti
=
DOOOOOOO
.
20
J
4
*
»
1
201
•
20
J
4
WIT
0001
,
H
笔急停止
•
,
〕
Rc
^
d
ft
-
Axis
Error
Bits
20
H
0
eie
40619
<
0620
<
0821
<
oe
?
2
^
3
^
Ml
2
OM
/
0
/
2
O
!
9
S
9
20
L
4
/
a
/
2
l
22
:
34
文泮夹
2014
/
6
/
2
?
12
<
X
文件夹
20
M
/
6
/
I
6
tl
43
文伴夹
20
H
/
6
/
30
23
S
?
m
文涔
20
H
/
T
/
3
!
23
31
EJS
文体
当月
SO
]
=
o
*
‘
.
201
.
.
ErrUO
'
ZOl
^
^
trr
ErrL
*
c
.
KOHJI
07
try
59
PB
当天
13
t
KB
I
S
【
rLo
«
_
«
0
l
<
JC
0
$
m
f
5
改曰期
20
H
/
8
/
W
l
?
:
CC
na
fi
!
逑日
«
201
V
趴
0
3
a
4
4
-
/
K
-
^
tH
3
)
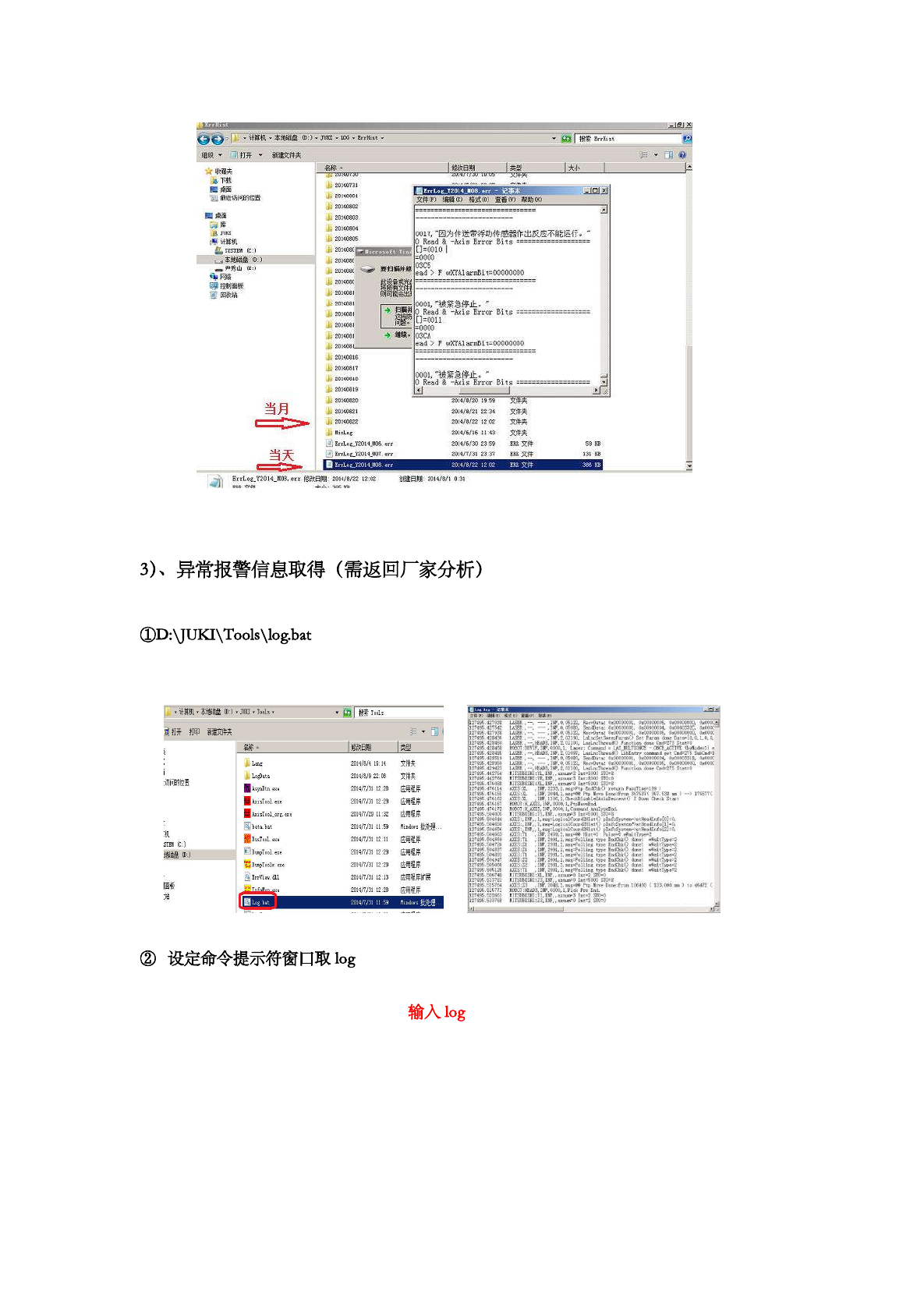
、
异常报警信息取得
(
需返回厂家分析
)
®
D
:
\
JUKI
\
Tools
\
log
.
bat
1
计
I
机
,
本地磁盘
(
D
:
)
.
JUH
.
Tools
>
Tools
:
gft
'
V
)
Hlfeoct
2
T
496.427038
LASER
.
一
.
—
.
1
.
NP
,
0
.
C
6122
.
RecvOata
:
0
x
00000001
.
O
1
OOOOOOO
6
.
0
*
00000000
.
OxOOOC
上
|
2
T
495.427542
LASER
,
一
,
IMP
,
0
.
C
6080
,
SecwData
:
0
x
00000001
,
0
*
00000004
,
0
*
0000332
C
.
(
hcOCOC
—
*
2
T
496.42793
B
U
^
R
.
—
.
-
-
-
,
1
NP
.
0
.
C
6122
,
RecvOata
:
0
x
00000001
.
0
x
000000
(
»
.
OxOOOOOOCO
,
OicOOOC
27496.428436
LASER
•
-
.
.
INF
.
2.03190
.
LaLncSetSwecpParanO
Set
P
«
ran
done
t
)
ata
=
(
(
X
0.1
.
0.0
.
ttAD
3
.
ISr
.
*
4
0
S
100
.
La
*
UcThread
<
)
Fun
<
t
:
an
done
CK
*
«
273
Stat
^
O
■
<
r
)
細
⑴
Iflff
m
繼文件夹
_
▼
OH
27496.428450
USER
.
1
細期
|
类型
名称
.
27495.428468
JOBOT
:
tRVIF
.
IMP
.
0000
,
1
,
User
:
Ccfloar
^
=
LASJLLTIONCS
-
0
*
O
>
mVl
(
by
«
cae
=
l
)
e
274
«
.
4284
S
5
LASER
.
—
.
ttAD
3.1
ST
.
2
.
01097
,
LasbxcThreadO
LibEntry
ccanand
tet
Cwtm
SubC
»
d
=
l
2
T
496.42
S
519
USE
?
.
—
•
—
.
IJff
,
0
,
C
6080
,
SerwHaia
:
0
*
00000001
.
iJiOOOOOOM
.
0
«
00003318
.
OicOOOC
文件夹
2014
/
8
/
4
19
:
14
2014
/
8
/
9
22
:
08
2014
/
7
/
31
12
:
28
2014
/
7
/
31
12
:
29
2014
/
7
/
29
11
:
32
2014
/
7
/
31
11
:
59
2014
/
7
/
31
12
:
11
2014
/
7
/
31
12
:
29
2014
/
7
/
31
12
:
29
2014
/
7
/
31
12
:
13
2014
/
7
/
31
12
:
28
Lang
27
«
6.428960
USER
.
-
-
.
INF
.
0
.
C
6122
,
RecvOata
:
0
x
00000001
.
OtOOOOOOO
$
.
0
x
00000000
.
27496.429423
USER
.
HEAD
3
,
INP
.
2.01100
,
LasUicThreadO
Function
^
au
:
Cid
=
2
?
5
Stat
*
0
2
T
496
.
442754
1
ITSURISHI
:
TL
,
IM
»
,
.
axnu
^
2
Im
二
2000
STCtg
SHI
:
TR
,
IHF
,
,
axnutf
:
3
Int
=
8000
STCCO
.
ftxm
»
=
0
rm
=
5000
STO
=
8
274
»
.
4761
H
AXIS
:
XL
,
lWF
.
2233
r
l
.
wg
-
Prp
End
:
嗆
<
)
return
PwsTiw
-
189
2
T
496.476156
AXIS
:
JI
.
IMP
.
2044.1
.
w
«
P
_
Ptp
love
Done
:
Fr
«
i
367537
(
367
.
$
38
m
71
^
.
476162
AXISrXL
,
1
M
»
,
1106
,
l
,
ChcckDiscbleZA
«
i
8
llescenlO
Z
D
«
m
Check
St
«
rt
2
T
496.476167
ROBOT
:
X
_
AXIS
,
;
NF
,
0000
,
1
,
Ptplovrf
^
d
.
2
T
496.476
J
72
:
X
_
AXIS
,
Iff
.
0000
,
1
,
Concr
«
and
Anaiyzclrti
.
27496.504005
IITSUBISHI
:
T
1
,
IMF
.
,
axn
^
3
Int
=
5000
STO
=
8
274
»
.
&
04644
AXIS
:
.
INF
..
)
.
rof
=
Lo
«
icalCoor
42
m
8
t
(
)
j
.
InfoSyste
»
-
>
stHcd
<
lIrvfoCOj
=
0
.
2
T
496
.
504
$
$
0
AXIS
:
,
INF
,
,
i
,
ixtf
8
=
Lo
«
icalCoor
<
l
2
Hist
0
rInfoSystc
^
>
8
tHrodInfo
[
l
]
=
0
.
27455.504656
AXIS
:
,
INF
,,
I
,
reg
=
Losi
<
a
)
Coor
<
!
2
Hiei
0
j
.
InfoSy
»
te
*
r
>
«
iHe
»
«
iInfD
[
23
=
0
.
2
T
496.5046
«
AXIS
:
T
1
,
IIP
,
240
$
.
1
.
Hist
=
0
Pulee
^
O
w
^
aitTyp
«
=
2
27496.504669
AXIS
:
T
1
.
.
2
&
91.1
.
wg
=
Pollin
«
xypt
lodChkO
done
!
^
aiTTyp
«
=
2
2
T
4
^
.
&
0472
H
AXIS
:
Z
1
•
IM
»
,
2
灼
1
,
1
,
w
«
=
PoUi
叫
livChkO
士况
!
«
WaitTypc
=
2
274
^
5.504837
AXIS
:
Z
1
,
:
»
»
,
2
W
1
,
1
,
w
8
=
Polline
ty
^
c
EIVOOIO
done
'
«
^
«
itTypc
=
2
274
^
5
.
5
D
4891
AXI
3
:
T
1
,
IKF
.
2
W
1
,
1
,
W
8
=
Polline
0
x
00
«
文件夹
LogData
274
»
.
442766
1
ITSIBI
2
T
495.47
&
088
I
1
TS
?
®
I
:
访醜苦
■
AsynBtn
.
exe
应用程序
|
AxisTool
.
应用程序
应用程序
Endows
批处理
…
应用程序
应用程序
应用程序
应用程序矿展
AxisTool
_
org
.
exe
逐
beta
,
bat
_
BusTool
.
■
’’
’
DumpTool
%
DumpToolw
.
e
^
ErrVm
.
dll
:
机
STEM
(
C
:
)
地聰
(
D
:
)
.
exe
27496
.
&
04
S
47
2
T
495.5
Cf
0
e
$
2
T
4
'
>
6
.
&
06125
2
T
4
^
.
.
W
*
?
4
S
27
«
D
,
S
13731
274
此
.
S
1
S
7
M
2749
S
.
515771
2
T
496
.
S
22661
H
!
2
T
495.533768
I
!
AXIS
:
Z
2
,
3
»
.
2
^
1
,
l
.
ws
=
Polliae
tm
Ei
^
OikO
done
!
rTyt
>
fis
=
2
AXIS
:
22
indOikf
)
4
tr
.
il
^
xlype
-
2
AX
1
S
:
T
1
.
IMF
.
2
Wl
,
l
,
r
«
|
=
Polline
tyi
>
e
EndChkO
4
cnr
!
-
WaitTyt
>
e
=
2
l
!
TS
>
^
ISH
[
:
XL
,
IW
.
,
axni
»
=
0
tnt
=
2
3
IITa
*
ISHI
:
Z
3
,
IMP
.
,
axnu
»
=
0
l
AXI
3
:
23
.
!
lf
.
H
»
07
:
fflAIi
3
.
irff
.
'
XWO
.
l
.
Pick
Pre
£
xid
.
Int
=
2
STO
^
O
【
nt
=
2
STO
=
0
ro
=
o
[
nt
=
5000
STO
=
8
Ptp
love
Done
:
Proti
1064
(
»
(
133.000
m
)
to
^
72
(
应用程序
站
ISUB
TSUB
2014
/
7
/
31
②
设定命令提示符窗口取
log
输入
log
计算机-管理
I
oo
a
i
命令提不符
向管理员
:
命令搓示符
.
icrosoft
Windows
[
版本
6.1
.
7601
]
Copyright
<
c
>
2010
Microsoft
Corporation
.
All
rights
reserved
.
计算机管理
JUKI
画图
p
:
\
JUKI
\
Too
Is
>
log
,
.
文档
RTX
Properties
图片
>
磁盘
*
理
任务计划程序
音乐
©
计算机
控制面板
设备和打印机
默认程序
帮助和支持
所有程序
w
关机卜
捜索程序和文件
vl
I
管理 员命令槎示符
-
记事 本
文件
CF
)
编辑
(
J
)
格式
⑼
查看
(
V
)
帮助
00
新建
00
打开
(
0
)
.
. .
保存
⑸
Copyright
<
c
>
2010
Microsq
12
,
INF
,
2045
,
1
,
rosg
=
Cautionl
1
this
tiitie
=
-
34
(
msec
)
:
HEAD
2
,
INF
,
0000
,
^
ZAxis
Optim
Pos
Wait
Kind
Place
.
:
HEAD
2
,
INF
,
0000
,
1
,
Mount
Rise
End
.
:
SYNCR
0
,
STS
,
0
,
1
,
YSyncro
Receve
Command
Bit
Ptrn
(
Hex
)
=
:
SYNCR
0
,
STS
,
0
,
1
,
YSyncro
Wait
Command
Bit
Ptrn
(
Hex
)
=
:
(
Robot
—
>
Shed
)
wCode
=
0
lStatus
=
0
:
HEAD
2
,
INF
,
0000
,
1
,
Place
End
.
:
4000
,
EventLog
Kind
=
ll
Parainl
=
250
Parain
2
=
0
Param
3
=
2
Param
4
=
5647
:
7083
,
Schedule
Thread
<
Product
Thread
:
Rev
-
[
1
(
PD
_
PR
0
D
)
]
Sched
:
4999
,
Disable
SchedTactTrigger
Port
=
l
Sw
=
0
Sched
:
7060
,
Schedule
Thread
>
Petri
Thread
:
Snd
-
[
0
x
62
(
SCHED
_
PC
_
HIST
)
Sched
:
-
DEBUG
-
SchedGetNextPickThMove
[
3
]
ResetNozzleO
.
Sched
:
-
DEBUG
-
SchedGetNextPi
ckThMove
[
3
]
ResetNozzleO
.
Sched
:
-
DEBUG
-
SchedGetNextPi
ckThMove
[
3
]
ResetNozzleO
.
Sched
:
-
DEBUG
-
SchedGetNextPi
ckThMove
[
3
]
ResetNozzleO
.
Sched
:
-
DEBUG
-
SchedGetNextPi
ckThMove
[
3
]
ResetNozzleO
.
Sched
:
-
DEBUG
-
SchedGetNextPi
ckThMove
[
3
]
ResetNozzleO
.
Sched
:
-
DEBUG
-
SchedGetNextPi
ckThMove
[
3
]
ResetNozzleO
.
Sched
:
-
DEBUG
-
SchedGetNextPi
ckThMove
[
3
]
ResetNozzleO
.
Sched
:
11103
ResetNozzle
9
0
1 7
-
1 2
-
1
-
1
Sched
:
7084
,
next
parain
X
=
4655783
,
Y
=
2113066
,
Spd
=
0
.
Hov
=
1
Ctrl
+
N
Ctrl
+
0
Ctrl
+
S
D
:
\
JUKI
\
Too
Is
>
log
2
2
页面设置
Cu
)
.
打印
00
.
. .
Ctrl
+
P
退出
GO
578
.
835699
578
.
835710
578.841399
578
.
841404
578
.
841413
578
.
841418
578.841423
578
.
841427
578
.
841432
578
.
841436
578
.
841446
578
.
841455
4
)
、
设备信息查看
(
死机时查看应用程序
)
*
迖財
i
'
令峰
’
少
,
國
10
_
善
Iftf
^
CAl
助利
t
计其机
8
理
_
-
S i P
.
I
H
©
任务计
Ov
.
Windows
^
=
>
El
应照拆
B
安全
§
Setup
il
转发
事件
ID
任务英
1001
无
1003
无
1003
9
c
1003
无
1003
无
1003
无
1003
无
3036
Gatherer
3036
Gatherer
3036
Gatherer
29
无
1000
无
0
无
1003
无
1003
无
細
I
曰期
《
1
盯
Ifl
2014
/
10
/
2117
:
09
:
16
2014
/
10
/
211
M
7
M
2014
/
10
/
21
16
)
4659
2014
/
10
/
21
16
:
33
*
14
2014
/
10
/
21
16
:
33
:
13
2014
/
10
/
2116
:
31
:
09
2014
/
10
/
2116
:
31907
2014
/
10
/
2116
:
30
:
37
2014
/
10
/
21
16
:
28
:
35
2014
/
10
/
21
16
:
2753
2014
/
10
/
21
16
:
27
:
38
2014
/
10
/
21
16
:
27
^
4
2014
/
10
/
2116
a
04
d
5
2014
/
10
/
21
15
:
52902
2014
/
10
/
21
15
:
5158
鄉
L
①
朗
①
做
①
朗
①
朗
①
姑
①
成
is
®
i
S
告
①
姑
①
做
①
rss
①
伝
-
§
①
倍
&
/
i
J
作白
Windows
E
-
.
Office
Soft
—
Office
Soft
-
Office
Soft
-
Office
Soft
.
Office
Soft
—
Search
Search
Search
mm
Outlook
LoadPcrf
QQCcrtlfic
—
:
夹
£
Jt
本地用户
W
泪
◎
觸
a
脚
Office
Soft
-
■
*
5
存
《
笤磁
&
S
理
獅
as
用辦
事件
3036
•
Search
详细做
形去访问内苗
®
<
mip
;
^
/
{
S
-
l
-
5
-
21
-
56173758
-
1177747539
-
1576964857
-
500
}
/
>
.
日态名称
CM
)
:
棚
(
S
>
:
挪
ID
(
E
)
:
应用程序
Search
记录时
f
0
(
D
>
:
2014
/
10
/
21
16
:
30
:
37
任钥
^
別
(
Y
)
:
Gatherer
矢埋本
(
K
)
:
g
奥
3036
费宙
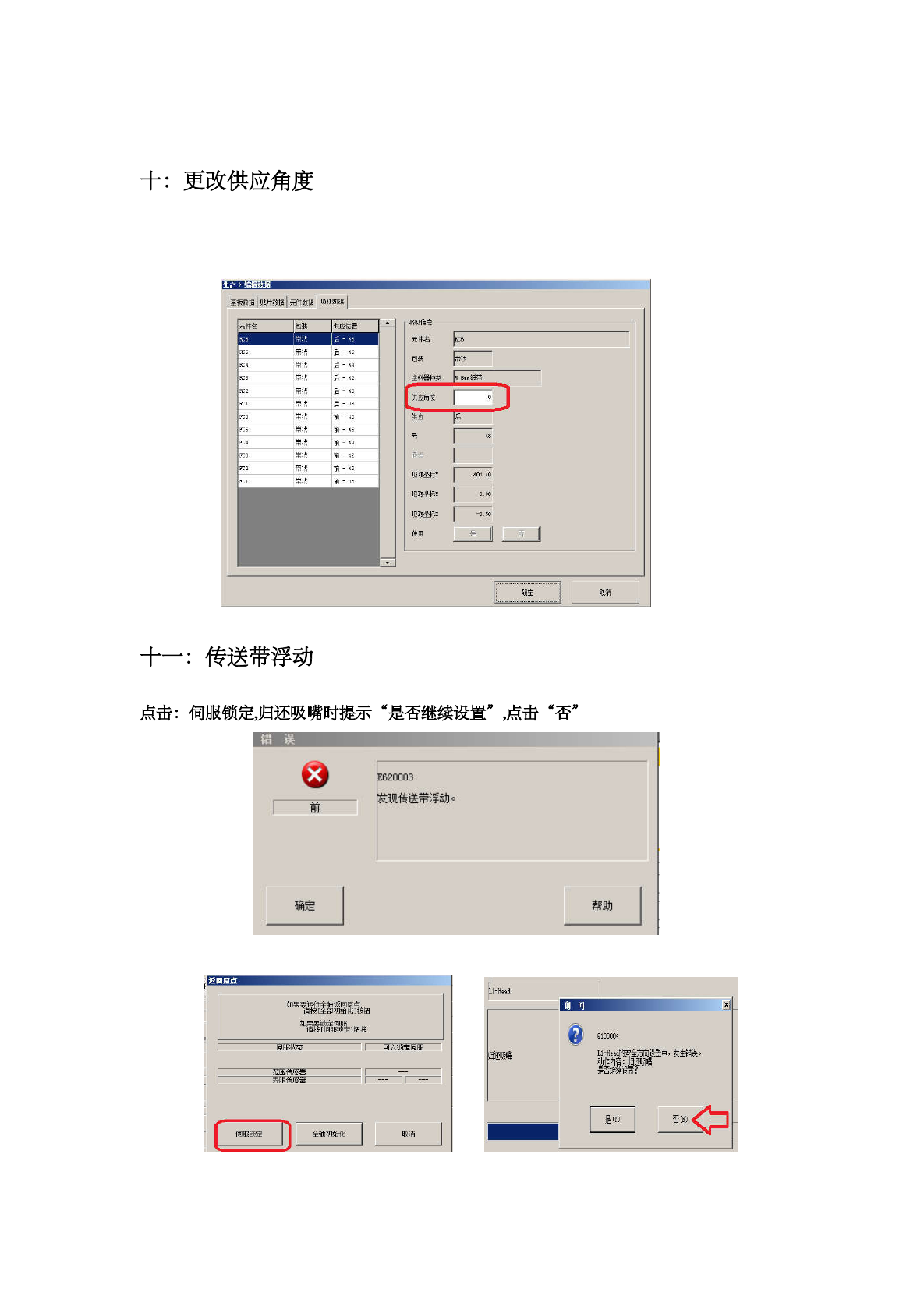
在“吸取数据”中更改“吸取角度”注意在此更改了吸取角度时,吸嘴的吸取角度也会转相
应的数量
十
:
更改供应角度
基 板
!
元
ft
教
a
D
明
RPHfsS
元件名
m
后
-
后
-
<
1
后
-
4 2
(
5
_
-
38
祐
-
苈
I
+
fast
帝梢
h
Binig
错
m
an
器 种 类
w
®
角
I
?
¥
m
st
*
si
-
<
6
粕
-
VI
祐
-
*
2
相
-
>
M
-
38
宏
1
大
:
S
£
极取坐标
x
宏
1
六
15
取坐桴
x
极取企愤
j
J
使用
m
卜一
:
传送带浮动
点击
:
伺服锁定
,
归还吸嘴时提示
“
是否继续设置
”
,
点击
“
否
E
620003
发现传送带浮动
。
前
确定
帮助
逅回原点
卜
1
-
Head
镧
如顯麵
如果
钮
Q
133004
徇服状态
可以锁萣闸服
㈣
俩辆
p
中
iiip
发生错误
。
imm
固传感器
传感器
S
»
)
伺服浈宝
全油初始化
取消