深度解析JUKI设备调试.pdf - 第195页
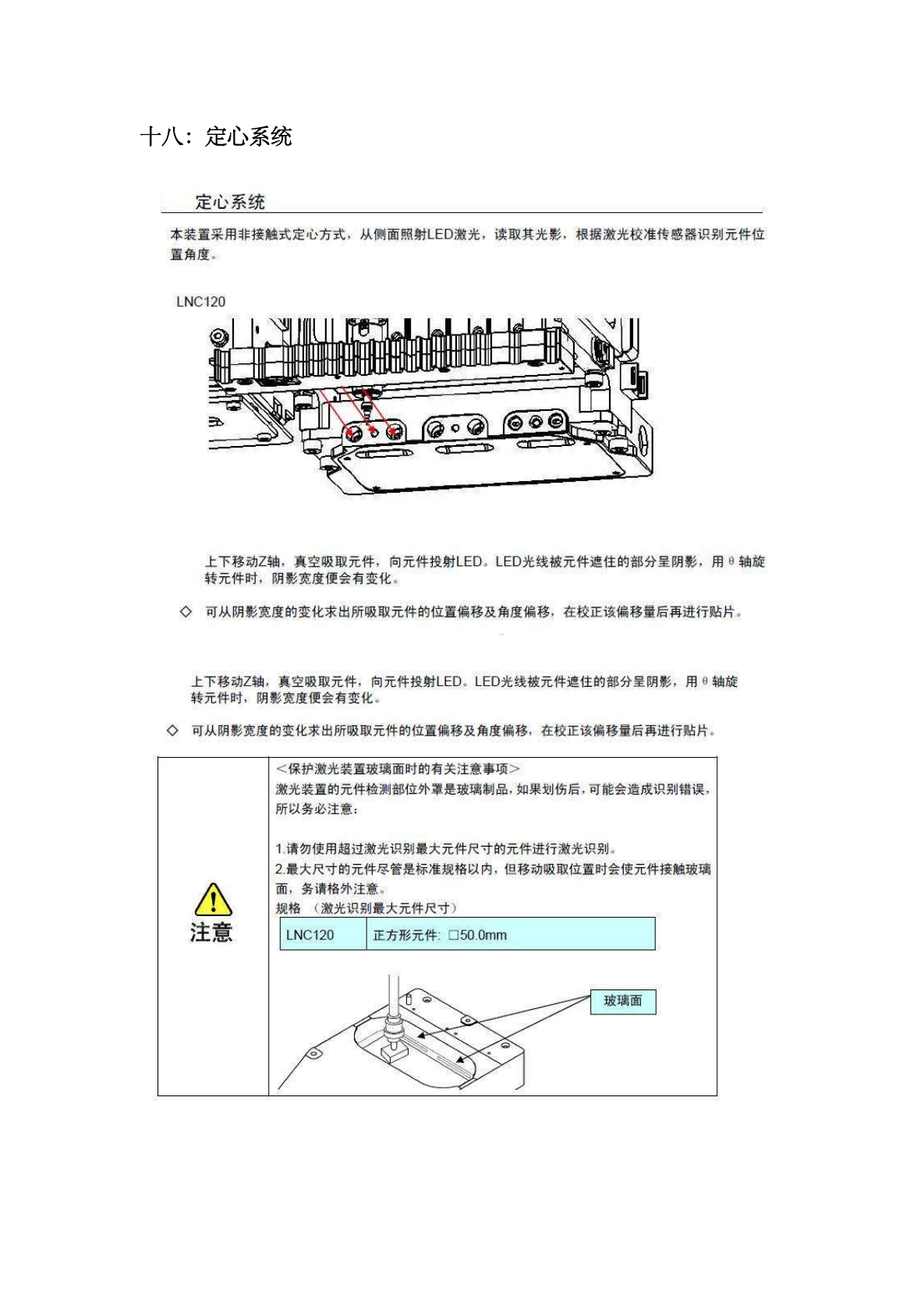
十八 : 定心系统 定心系统 本装置采用非接触式定心方式 , 从侧面照射 LED 激光 , 读取其光影 , 根据激光校准传感器识别元件位 i 角度 。 LNC 120 上下移动 Z 轴 , 真空吸取元件 , 向元件投射 LED 。 LED 光线被元件遮住的部分呈阴影 , 用 ( ) 轴旋 转元件时 , 阴影宽度便会有变化 。 ◊ 可从阴影宽度的变化求出所吸取元件的位置偏移及角度偏移 , 在校正该偏移萤后再进行贴片 。 ^ \ 上下移动 …

十七
:
Head
单元
Head
申元的峋成
H
*
35
辛杵
》
元忭
53
[
置备
;
移
.
.
a
汊稱移的激光吒够抟
.
以及可
i
_
7
哭功
、
货圩切忭的
Z
;
#
坊任沟呋
.
本枳的构戏知下
,
■
SKB
.
ar
^
is
■
i
;
:
LNC
60
3
iTte
祕
mm
娜
.
v
Head
h
■
」
■
■
s
:
!
‘
ad
部
(
Head
Unit
)
|
装备
LNC
120
和
occ
,
安装吸嘴
,
进彳
r
吸取
•
定心
•
贴装元件
。
t
-
NC
120
|
功能
:
用于确定元件中心
(
定心
)
。
(
可同时进行
6
个元件的定心
>
|
HMS
-
HMS
2
(
Height
Measurement
System
)
|
测黾兀件吸取卨度或苺板面高度
、
检测贴片坐标处有无异
物
、
贴片荇无倾斜
,
或用作
HMS
夹紧
(
长尺寸基板
)
传感器
|
OCC
(
Offset
Correction
Camera
)
|
主要功能
:
确认基板
h
的标记
•
贴片坐紅
•
对准位置等
u
十八
:
定心系统
定心系统
本装置采用非接触式定心方式
,
从侧面照射
LED
激光
,
读取其光影
,
根据激光校准传感器识别元件位
i
角度
。
LNC
120
上下移动
Z
轴
,
真空吸取元件
,
向元件投射
LED
。
LED
光线被元件遮住的部分呈阴影
,
用
(
)
轴旋
转元件时
,
阴影宽度便会有变化
。
◊
可从阴影宽度的变化求出所吸取元件的位置偏移及角度偏移
,
在校正该偏移萤后再进行贴片
。
^
\
上下移动
Z
轴
,
真空吸取元件
,
向元件投射
LED
。
LED
光线被元件遮住的部分呈阴影
,
用
《
轴旋
转元件时
,
阴影宽度便会有变化
。
<
0
可从阴影宽度的变化求出所吸取元件的位置偏移及角度偏移
,
在校正该偏移量后再进行貼片
.
<
保护激光装置玻璃面时的有关注意事项
>
激光装
M
的元件检测部位外罩是玻璃制品
,
如果划伤后
,
可能会造成识别错误
,
所以务必注意
:
1
.
请勿使用超过激光识别最大元件尺寸的元件进行激光识别
d
2
.
最大尺寸的元件尽管是标准规格以内
,
但移动吸取位置时会使元件接触玻璃
面
,
务请格外注意
》
规格
(
激光识别最大元件尺寸
)
A
注意
正方形元件
:
□
50.0
mm
LNC
120
玻璃面
十九
:
供料器
(
1
)
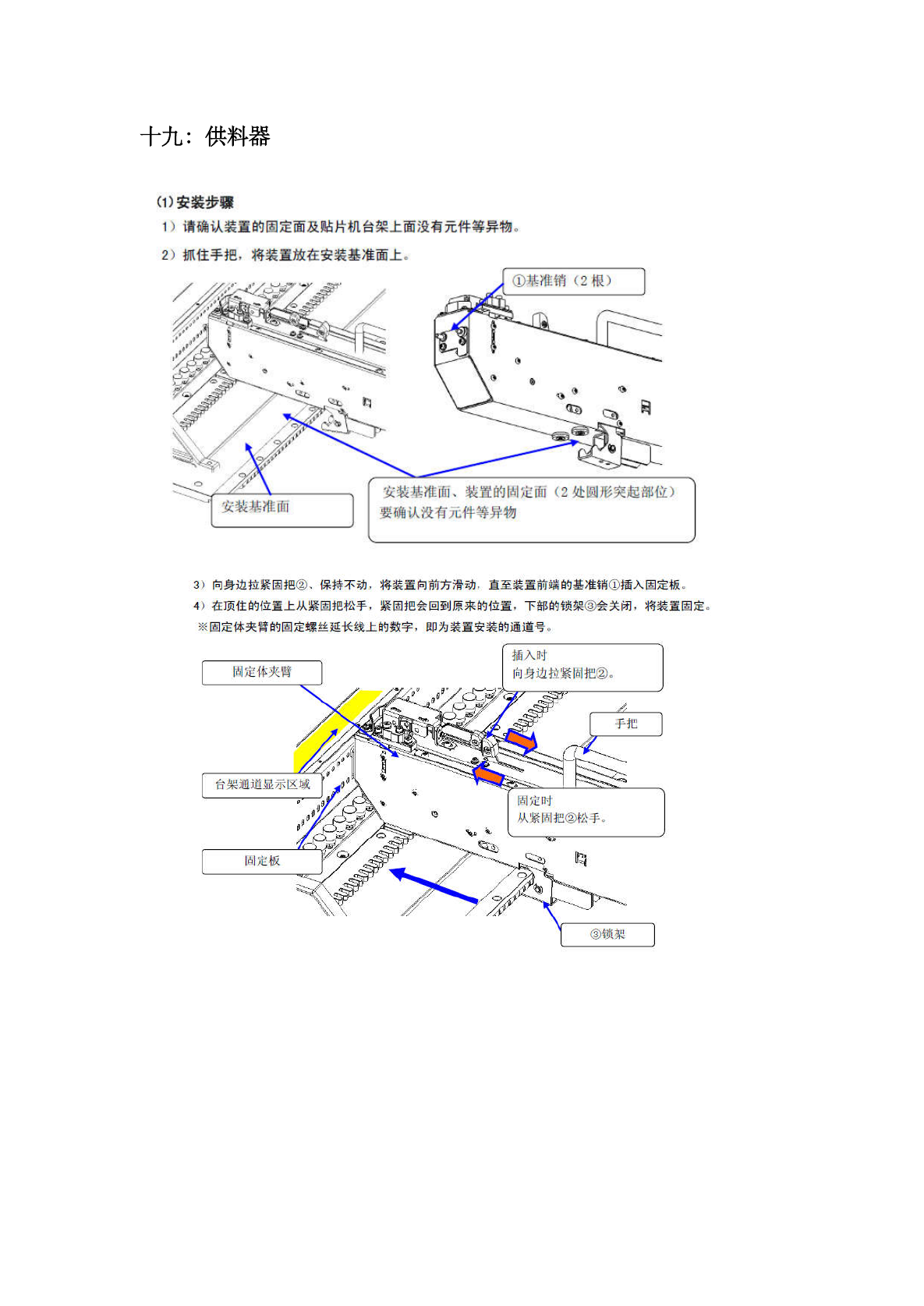
安装步骤
1
)
请确认装置的固定面及贴片机台架上面没有元件等异物
。
2
)
抓住手把
,
将装置放在安装基准面上
。
①
基准销
(
2
根
)
9
安装苺准而
、
装罝的间定面
(
2
处阀形突起部位
)
要确认没有元件等异物
'
安装苺准
_
3
)
向身边拉紧固把
②
、
保持不动
.
将装置向前方滑动
.
直至装置前端的基准销
①
插入固定板
。
4
)
在顶住的位置上从紧固把松手
.
紧固把会回到原来的位置
.
下部的锁架
③
会关闭
.
将装置固定
※
固定体夹臂的固定螺丝延长线上的数字
,
即为装
M
安装的通道号
.
.
插入时
间定体臾臂
向身边拉紧
N
把
②
。
台架通边显示区域
尚定时
从紧
N
把
②
松手
。
固定板
③
锁架