DECAN_S2_Admin(Chi_Ver4.5).pdf - 第190页
7-32 Advanced Chip Shooter DECAN S2 Admin i s trator’s Guide < 方向检测 > T AP 画面 在 IC 部件 及 B all 部件中相同适用。 < 实体 极性 > 组合框 设置要执行方向检验 Body 的 Polarity 。 - 不用注意 要执行方向检验的 Body 跟 Polarity 无关地 进行识别时选择。 - 黑夜灯 要执行方向检验的…
7-31
元件的登记
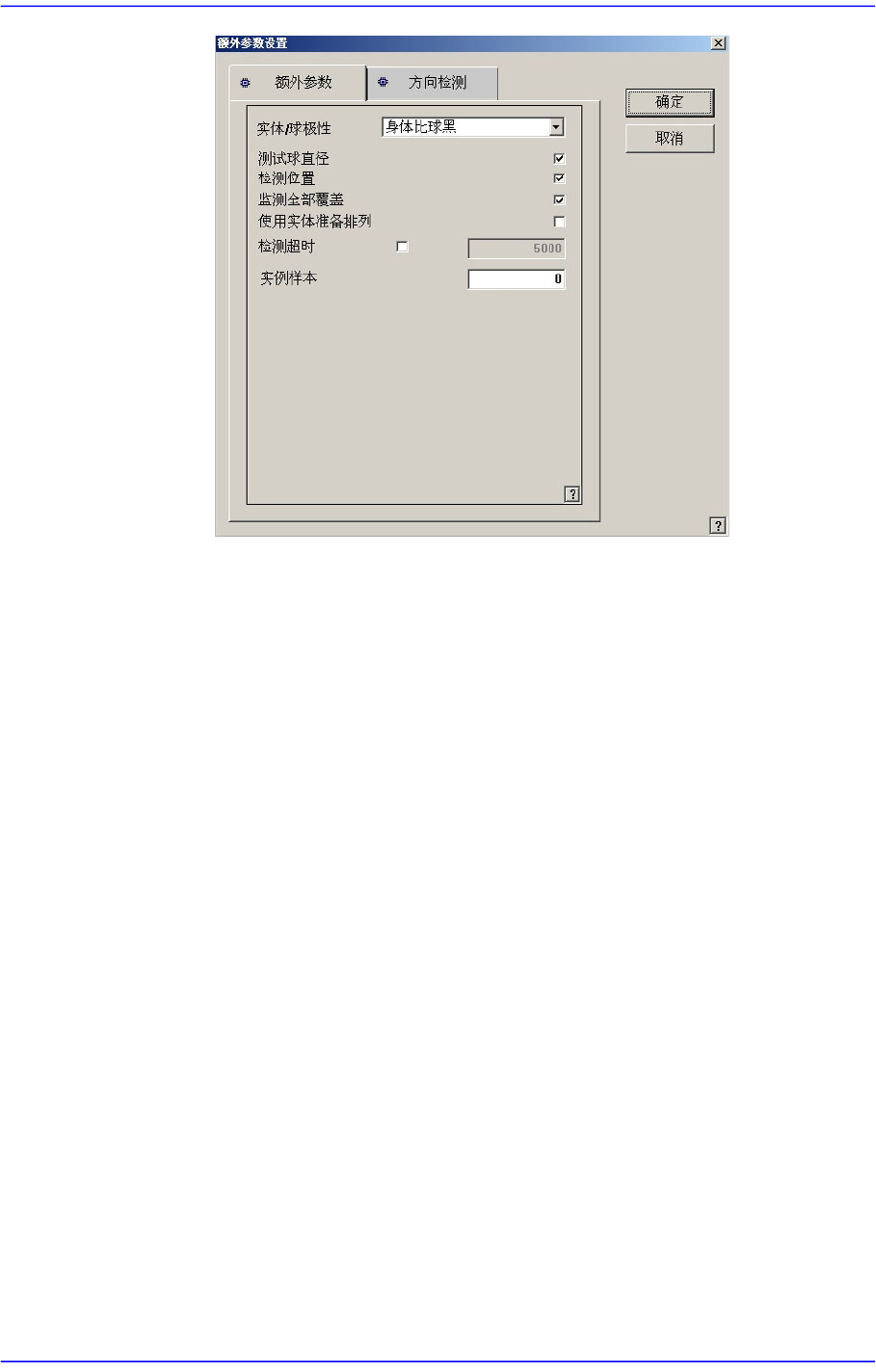
<实体/球极性>校验盒
设置Body和Ball间的亮度。
- 身体比导程黑: Body比 ball暗时。
- 实体比导线轻: Body比 ball亮或者亮度相差不大时。
<准确找到领导技术文件处理系统>校验盒
检查各ball的直径校验直径是否在容许值以内。
<检测位置>校验盒
检查各ball的位置,校验位置是否在容许值以内。
<监测全部覆盖>校验盒
此选项已校验,则检查所有ball,当所有ball都在容许误差范围内时
识别成功, 尚未校验时尽管一部分ball出现失败也利用剩余ball计算
出部件的中心。
<使用实体准备排列>校验盒
部件识别时利用部件的Body 信息计算出部件大概的位置。
<检测超时> 校验盒
部件识别时设定识别时间(单位 msec)
<实例样本> 编辑框
Body识别时设定Sampling程度。 (0~10, 0 : auto)
7-32
Advanced Chip Shooter DECAN S2 Administrator’s Guide
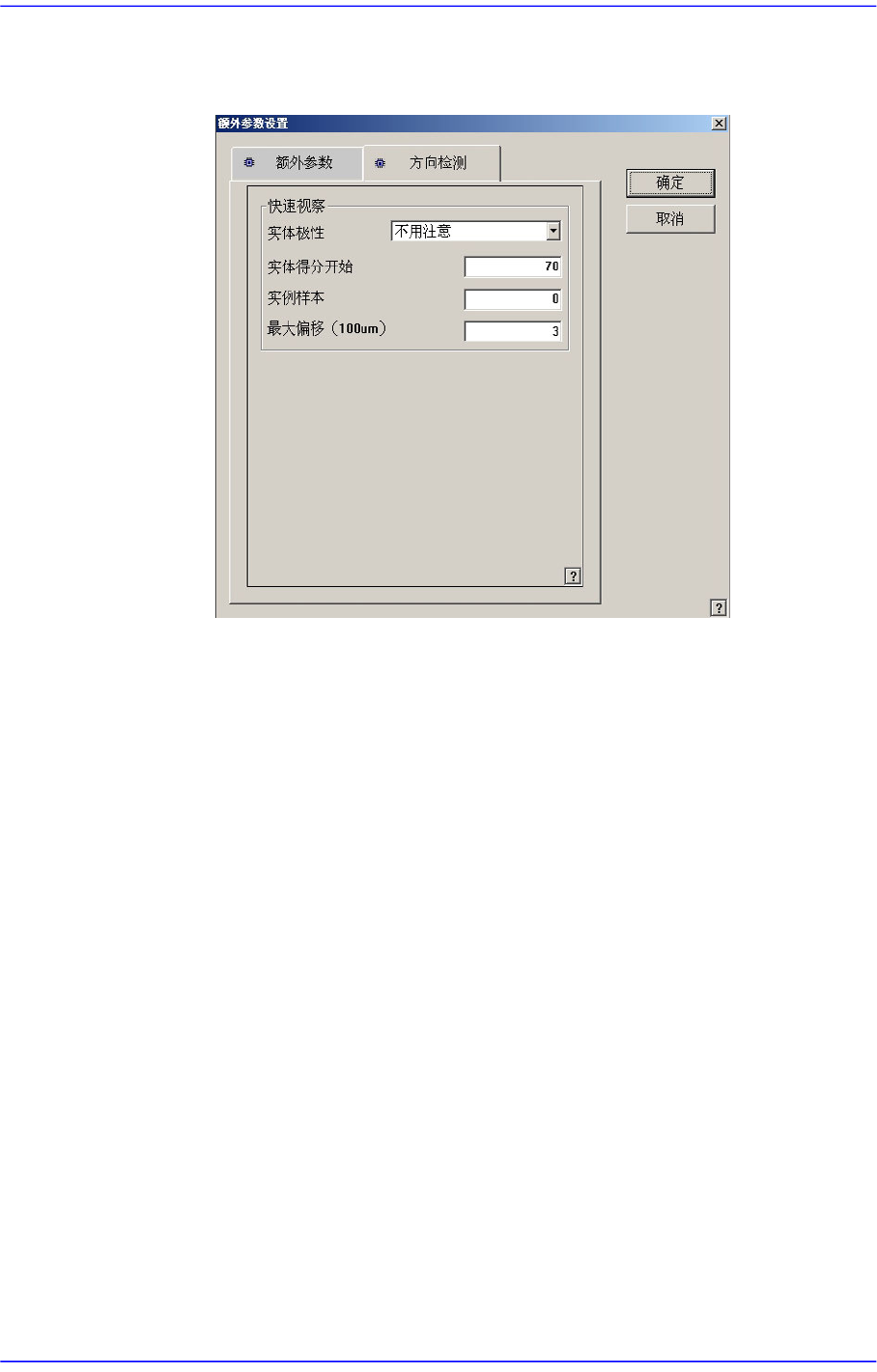
<方向检测> TAP画面
在IC部件及Ball部件中相同适用。
<实体极性> 组合框
设置要执行方向检验 Body的 Polarity。
- 不用注意
要执行方向检验的Body跟Polarity无关地进行识别时选择。
- 黑夜灯
要执行方向检验的Body比背景暗时选择。
- 点亮
要执行方向检验的Body比背景亮时选择。
<实体得分开始>编辑框
设置要执行方向检验 Body的 Threshold。 (0~100)
<实例样本>编辑框
设置要执行方向检验 Body的 Sampling程度。 (0~10, 0 : auto)
<最大偏移(100um)> 编辑框
设置要执行方向检验 Body的最大容许误差。 (0~10)
<轮廓/真实显> 按钮
通过’Vision’窗口显示的影象显示成实际肉眼可看到的、尚未适用Threshold的
影象(Real Display) 或 MMI识别的、 适用Threshold的影象(Binary)。
7-33
元件的登记
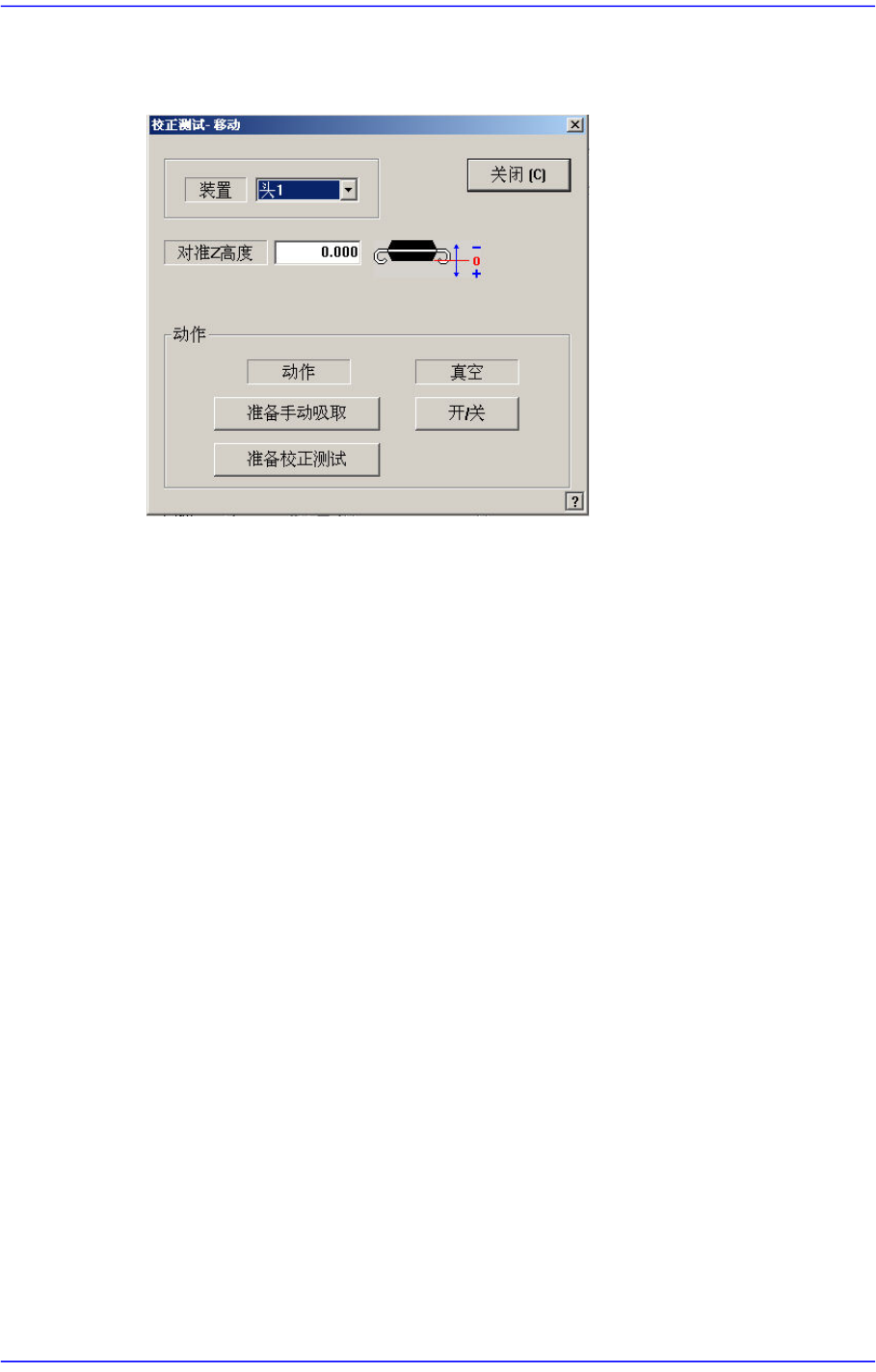
<Move> 按钮
用于手动吸附部件进行部件识别检验。点击此按钮则显示如下对话框。
<装置> 组合框
选择使用在部件识别的摄象机。 可选择的装置如下;
部件编辑对话框的<相机号.>组合框中设置为 “ 飞行相机 1~飞行相机
6(SM421) / 飞行相机1~飞行相机4(SM421F) / 飞行相机1~飞行相机
12(SM411, SM411F)” 时,<装置>组合框非激化。(各飞行相机相应的磁头
设置为默认)
<对准Z高度> 编辑框
设定需要识别的高度。以部品的底面为准,识别其上面时设定–值,识别其
下面时设定‘+’值。
<动作> 领域
<准备手动吸取> 按钮
为了手动把部件吸附到贴装在磁头的吸嘴末端,把磁头组件移动到
Home 位置。此时,适合吸附部件的吸嘴应提前安装在相应磁头上。
<准备校正测试> 按钮
准备部件识别检验。部件识别Camera为 “飞行相机” 时, 贴装在磁头的吸
嘴末端的Z轴高度移动到部件识别高度(Align Height), 关闭Mirror后给部
件照射照明。
部件识别Camera为“ 固定相机” 时, 贴装在磁头的吸嘴末端的Z轴高度移
动到安全高度,磁头组件移动到固定相机位置后,把吸嘴末端的Z轴高
度移动到部件识别高度(Align Height)。
<真空 开/关> 按钮