DECAN_S2_Admin(Chi_Ver4.5).pdf - 第372页
14-14 Advanced Chip Shooter DECAN S2 Administrator’s G ui de G1F-Y : 前面 Gantry 的 Y 轴 G1R-X: 后面 Gantry 的 X 轴 G1R-Y : 后面 Gantry 的 Y 轴 H1F-Z1: 前面 Gantry 的 Head 1 的 Z 轴 H1F-Z2: 前面 Gantry 的 Head 2 的 Z 轴 H1F-Z3: 前面 Gantry 的 He…
14-13
Machine Calibration
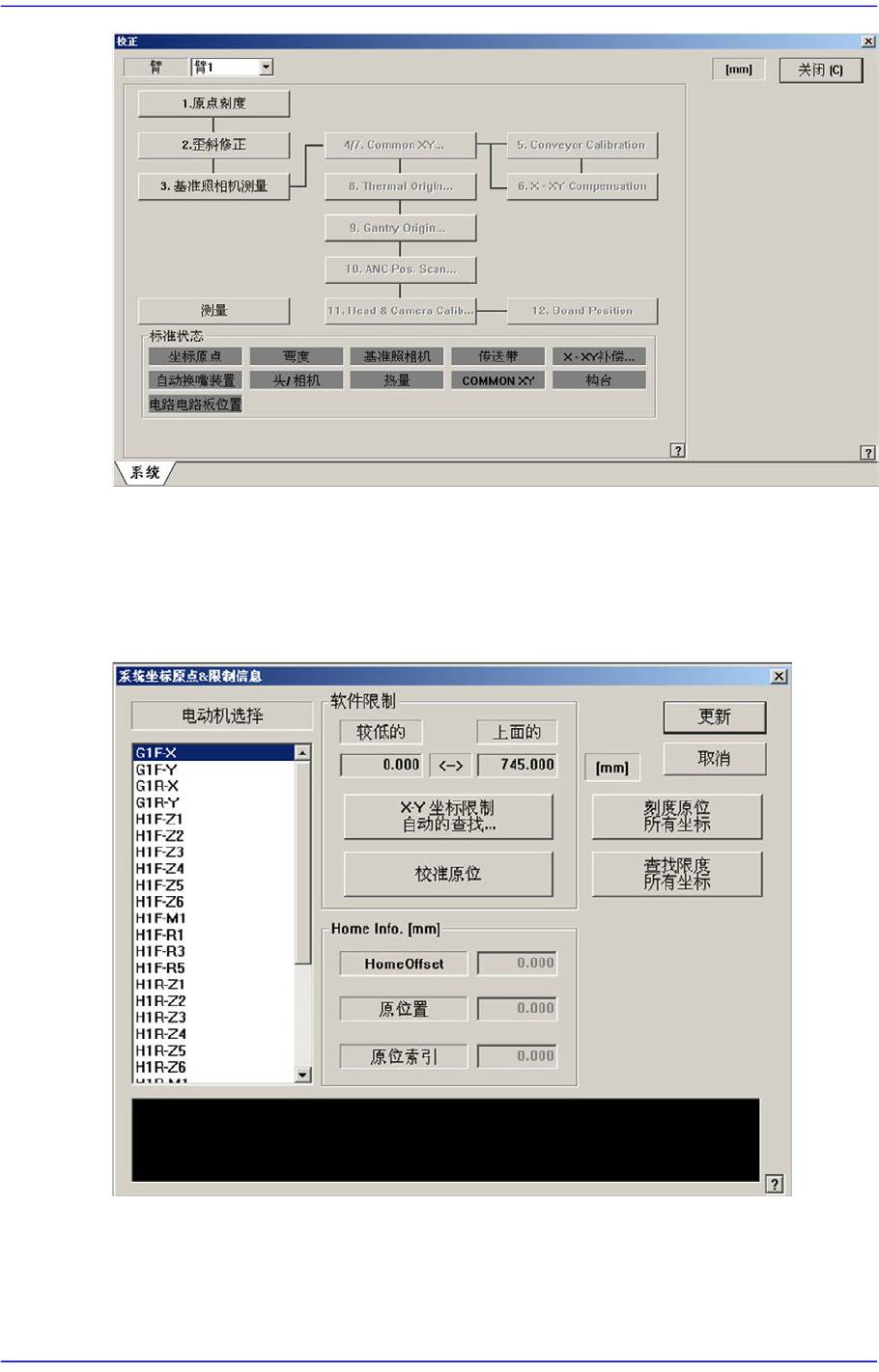
14.3.1. 原点刻度
设定各驱动轴的移动位置的限度值。选择此按钮时显示如下的对话框。
图
14.7 “
系统坐标原点
&
限制信息
”
对话框
<电动机选择> 目录框
选择将要设定限度的驱动轴。可选择的驱动轴如下。
G1F-X: 前面 Gantry的 X轴

14-14
Advanced Chip Shooter DECAN S2 Administrator’s Guide
G1F-Y: 前面 Gantry的 Y轴
G1R-X: 后面 Gantry的 X轴
G1R-Y: 后面 Gantry的 Y轴
H1F-Z1: 前面 Gantry的 Head 1的 Z轴
H1F-Z2: 前面 Gantry的 Head 2的 Z轴
H1F-Z3: 前面 Gantry的 Head 3的 Z轴
H1F-Z4: 前面 Gantry的 Head 4的 Z轴
H1F-Z5: 前面 Gantry的 Head 5的 Z轴
H1F-Z6: 前面 Gantry的 Head 6的 Z轴
H1F-Z7: 前面 Gantry的 Head 7的 Z轴
H1F-Z8: 前面 Gantry的 Head 8的 Z轴
H1F-Z9: 前面 Gantry的 Head 9的 Z轴
H1F-Z10: 前面 Gantry的 Head 10的 Z轴
H1F-M1: 前面Gantry的Mirror轴
H1F-R1: 前面
Gantry的 Theta 轴 (H1, H2)
H1F-R3: 前面 Gantry的 Theta 轴 (H3, H4)
H1F-R5: 前面 Gantry的 Theta 轴 (H5, H6)
H1F-R7: 前面 Gantry的 Theta 轴 (H7, H8)
H1F-R9: 前面 Gantry的 Theta 轴 (H9, H10)
H1R-Z1: 后面 Gantry的 Head 1的 Z轴
H1R-Z2: 后面 Gantry的 Head 2的 Z轴
H1R-Z3: 后面 Gantry的 Head 3的 Z轴
H1R-Z4: 后面 Gantry的 Head 4的 Z轴
H1R-Z5: 后面 Gantry的 Head 5的 Z轴
H1R-Z6: 后面 Gantry的 Head 6的 Z轴
H1R-Z7: 后面 Gantry的 Head 7的 Z轴
H1R-Z8: 后面 Gantry的 Head 8的 Z轴
H1R-Z
9: 后面
Gantry的 Head 9的 Z轴
H1R-Z10: 后面 Gantry的 Head 10的 Z轴
H1R-M1: 后面 Gantry的 Mirror轴
H1R-R1: 后面 Gantry的 Theta 轴 (H11, H12)

14-15
Machine Calibration
H1R-R3: 后面 Gantry的 Theta 轴 (H13, H14)
H1R-R5: 后面 Gantry的 Theta 轴 (H15, H16)
H1R-R7: 后面 Gantry的 Theta 轴 (H17, H18)
H1R-R9: 后面 Gantry的 Theta 轴 (H19, H20)
STEF-W: Entry Shuttle的conveyer宽度调节马达
STEF-S: Entry Shuttle的移动马达
ST1F-W:前面作业conveyer(F2)的宽度调节马达
ST1R-W: 后面作业conveyer(R2)的宽度调节马达
STXF-W: Exit Shuttle的conveyer宽度调节马达
STXF-S: Exit Shuttle的移动马达