DECAN_S2_Admin(Chi_Ver4.5).pdf - 第443页
15-7 系统设置 <Found> 目录框 显示识别成功的输送机轨道上的 Fiducial 。 <V ision Find> 按钮 对输送机轨道上的 Fiducial 再次进 行识别。 <Home Rail> 按钮 执行对 W idth 伺服马达的 ‘Home’ , 把输送机的 Moving Rail 重新移动到 Home 位置。 此时, 请先 除去设置在 Backup T able 的 …
15-6
Advanced Chip Shooter DECAN S2 Administrator’s Guide
<边缘固定器迟延> 编辑框
边夹动作后到PCB完成识别为止的延迟时间。
<传感器重新检查> 编辑框
PCB感应传感器第一次感应conveyer的PCB后,经过设置的Delay后再
次进行感应,防止传感器的误操作。
<站> 组合框
选择有关Stopper Delay设置的Station。
<停止向上> 编辑框
Stopper UP传感器检测到制动器后到完成PCB固定为止的延迟时间。
<停止向下> 编辑框
Stopper Down传感器检测到制动器后到完成PCB固定为止的延迟时间。
<Conveyor Rail Width Setting> 按钮
设备启动后对设备全体执行Home( )时,如果识别出输送机轨道上的
Fiducial确认贴装station的当前宽度,与关闭电源之前保存的宽度信息相比较如
果有变化则对输送机轨道执行‘Home’。
为了迅速对贴装station执行“Home’,设定输送机轨道上Fiducial的使用与否。该
功能只有在Dual Lane Conveyor设备中才能被激活。
<Use Rail Fiducial>选择框
为了确认贴装station的当前宽度,使用输送机轨道上的Fiducial时选择。
电源关闭时由于贴装station的宽度变更,对设备全体执行Home( )时如果未
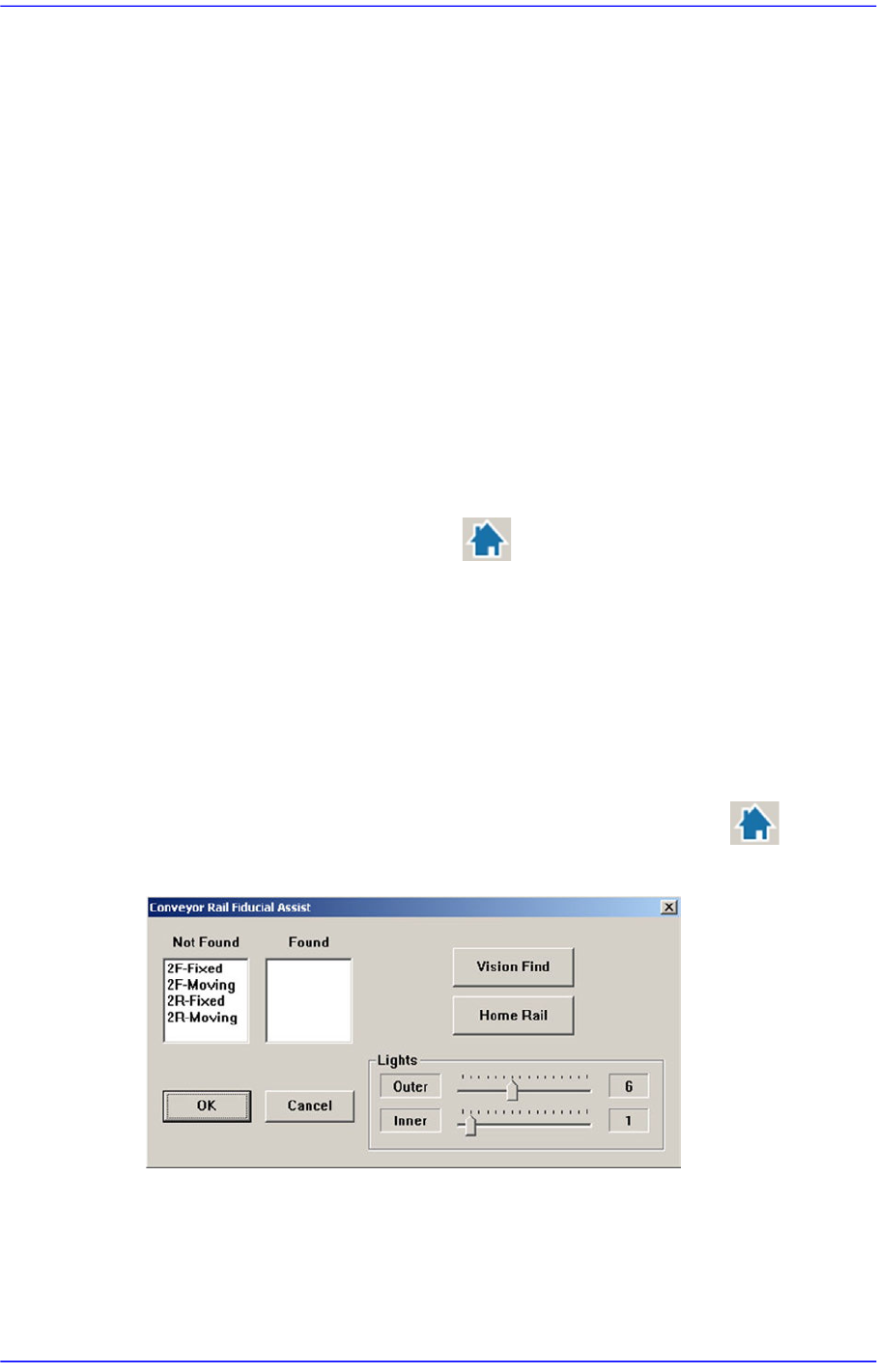
识别输送机轨道上的Fiducial,则显示以下对话框。
<Not Found>目录框
显示识别失败的输送机轨道上的Fiducial。

15-7
系统设置
<Found>目录框
显示识别成功的输送机轨道上的Fiducial。
<Vision Find>按钮
对输送机轨道上的Fiducial再次进行识别。
<Home Rail>按钮
执行对Width伺服马达的‘Home’,把输送机的Moving Rail重新移动到Home
位置。
此时,请先除去设置在Backup Table的Backup Pin。
<Shuttle Position Offset> 领域
把Shuttle Conveyor类型选项。
Entry: 设置Entry Conveyor的移动偏移量。
Exit: 设置Exit Conveyor的移动偏移量。
<更新> 按钮
把设定的数据传送到设备之后关闭对话框。
15-8
Advanced Chip Shooter DECAN S2 Administrator’s Guide
15.2. Position [F4]
设定设备的Feeder Base原点及系统回收箱的位置。
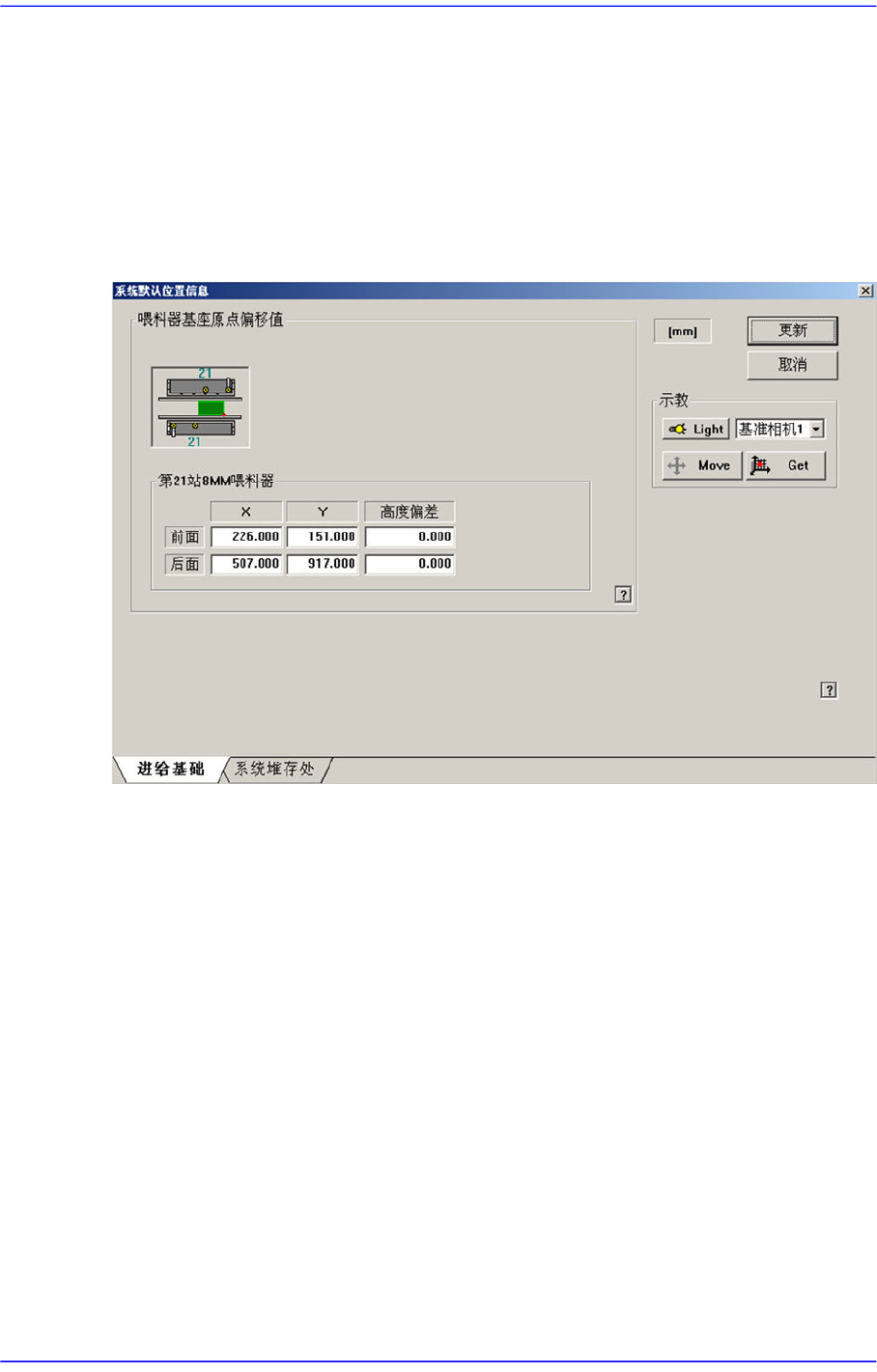
15.2.1. <进给基础> TAP对话框
设定设备各构成品的原点。
图
15.5
进给基础
” TAP
对话框
<喂料器基座原点偏移值> 领域
设定Feeder Base有关的数据。
<第21站8MM喂料器> 编辑框
设定Feeder Base的原点。
设定Feeder Base原点的方法如下。
1. 把最小的部件(0603, 1005)Rell贴装在喂料器后设置在前面Feeder Base的
21号槽。
Feeder设置钱,请确认 Feeder Base上面有无废弃的部件,如果有请除去
废弃部件。
2. 用鼠标选择<第21 8mm站位吸取点> 编辑框后,在 <示教>领域的组合
框中选择 ‘基准相机’。
3. 请点击<Move>按钮把基准相机移动到设置在前面feeder base的21号槽
的带式喂料器的吸附点。
4. 请利用基准相机示教带式喂料器的吸附点。此时,如下图所示示教中心