DECAN_S2_Admin(Chi_Ver4.5).pdf - 第304页
10-10 Advanced Chip Shooter DECAN S2 Admin i s trator’s Guide < 时间 ( sec)> 编辑 盒 领域 此领域用来输入执行设备的每个动作所需的时间, 并计算在优化中的作业时 间。 另外, 盘式喂料器 Y and 盘式喂料器 Z 的值可以影响作业顺序的决定。 因此, 为了提高作业效率及估算作业时间的精确度要输入尽可能接近真实值的 数值。 传送装置 : PCB…
10-9
Optimization
1:
指定的贴装点最多的元件
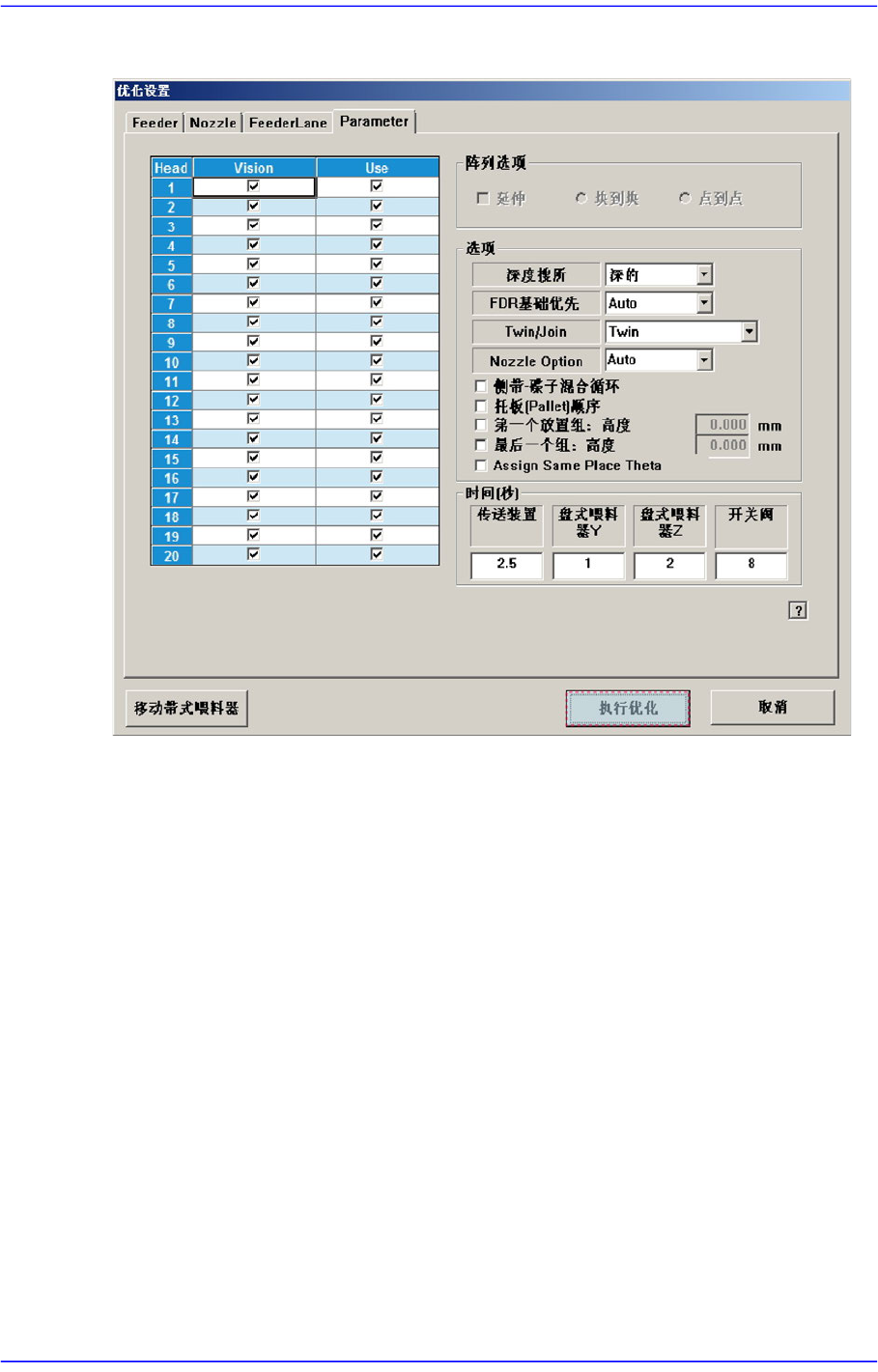
<Nozzle Option> 组合框
Manual
直接使用现有的吸嘴配置。
Auto
忽略现有的吸嘴配置并且重新自动配置吸嘴。
Semi-Auto
优化时不移动先前已配置在ANC的吸嘴而把需要的吸嘴自动配置到可
用孔上。
<侧带-碟子混合循环> 校验盒
在tray feeder更换部件的途中也可对通过带式喂料器供应的部件执行贴装作
业。
<Pallet Sequence> 校验盒
可以在执行Optimizer时优化Tray的Pallet Pick-up顺序。
<第一个放置组:高度> 校验盒
为了先安装比输入到右侧编辑框的部件高度更小部件时使用。如果选择此复
选框,右侧的编辑框就被激活。此时输入部件的高度。
<最后一个组:高度> 校验盒
为了最后安装比输入到右侧编辑框的部件高度更小部件时使用。如果选择此
复选框,右侧的编辑框就被激活。此时输入部件的高度。
<Assign Same Place Theta> 校验盒
使用微芯片时让贴装角度相同的各头部使用同一周期(cycle)。

10-10
Advanced Chip Shooter DECAN S2 Administrator’s Guide
<时间(sec)> 编辑 盒领域
此领域用来输入执行设备的每个动作所需的时间,并计算在优化中的作业时
间。另外,盘式喂料器Y and盘式喂料器Z的值可以影响作业顺序的决定。
因此,为了提高作业效率及估算作业时间的精确度要输入尽可能接近真实值的
数值。
传送装置: PCB搬入到作业站到由backup table固定所需要的时间(SEC)
盘式喂料器Y: Multi-多盘式喂料器的盘式喂料器在Y方向移动所需时间
(sec)。
盘式喂料器Z: Multi-多盘式喂料器的盘式喂料器在 Z方向移动所需时间
(sec)。
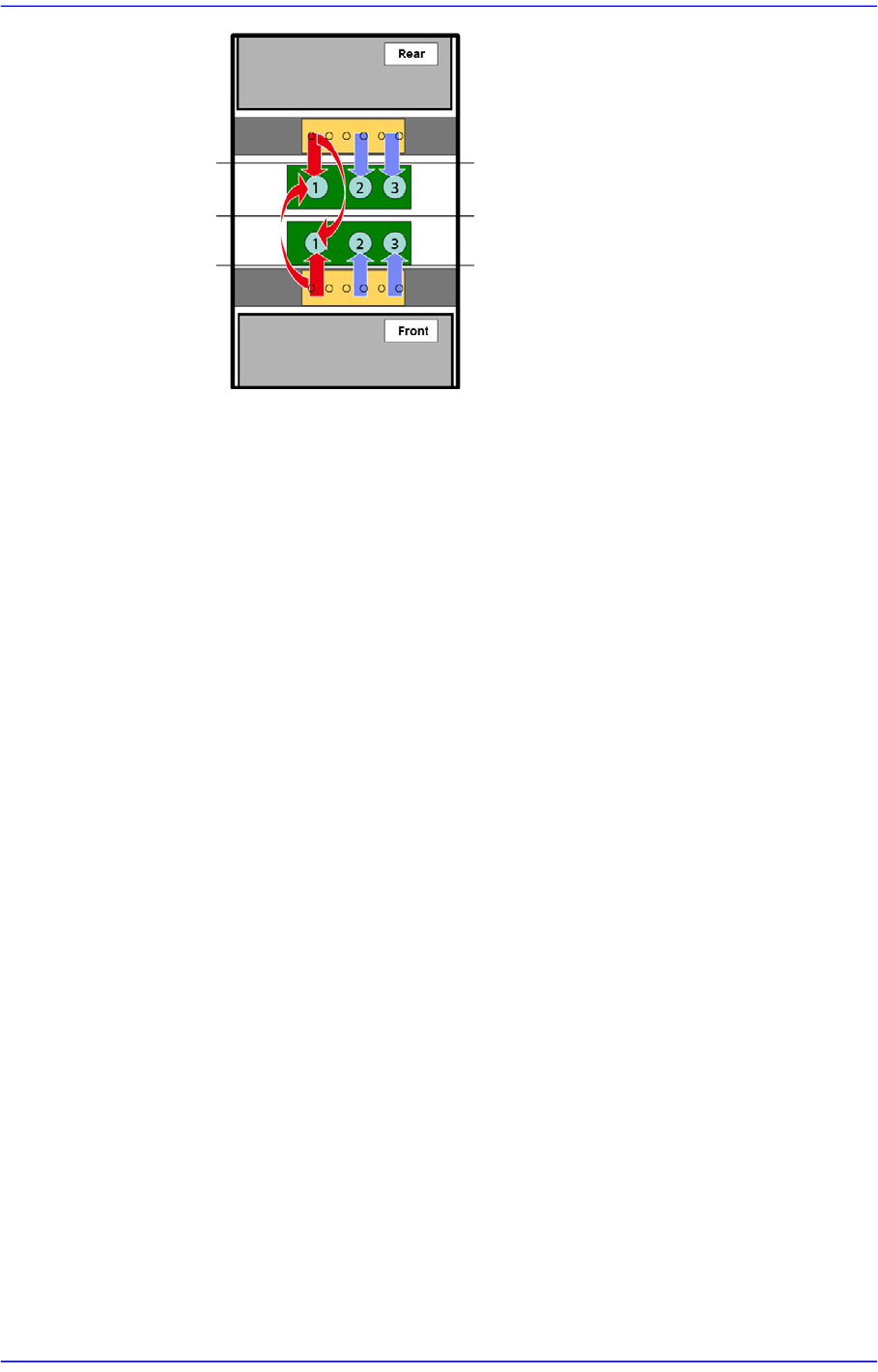
开关阀: Shuttle 盘式喂料器的 PAD往返1次所需时间(sec)。
10-11
Optimization
10.5. 优化器(Optimizer)的执行
<移动带式喂料器> 按钮
忽略已经配置的所有带式喂料器,重新配置所有带式喂料器时,单击<移动带式
喂料器>按钮。单击该即可删除之前配置的所有带式喂料器。
<执行优化> 按钮
储存已设置的选项并执行优化器(Optimizer)。单击<移动带式喂料器>按钮腾空
所有位置后,执行优化器较能得到更好的结果。
<取消> 按钮
不保存当前设置的最佳化选项关闭“最佳化执行” 对话框。