OPERATING MANAUAL(FOR ENGINEERS).pdf - 第42页
Page 1-6 1-2 Operation Theory (Mounting Mechanism) The machine has 12 mounting heads, each head being equipped with 5 nozzles. Each head carries out the following operations from 1 to 12 simultaneously at each station (t…
Page 1-5
FUNCTIONS
1
Features
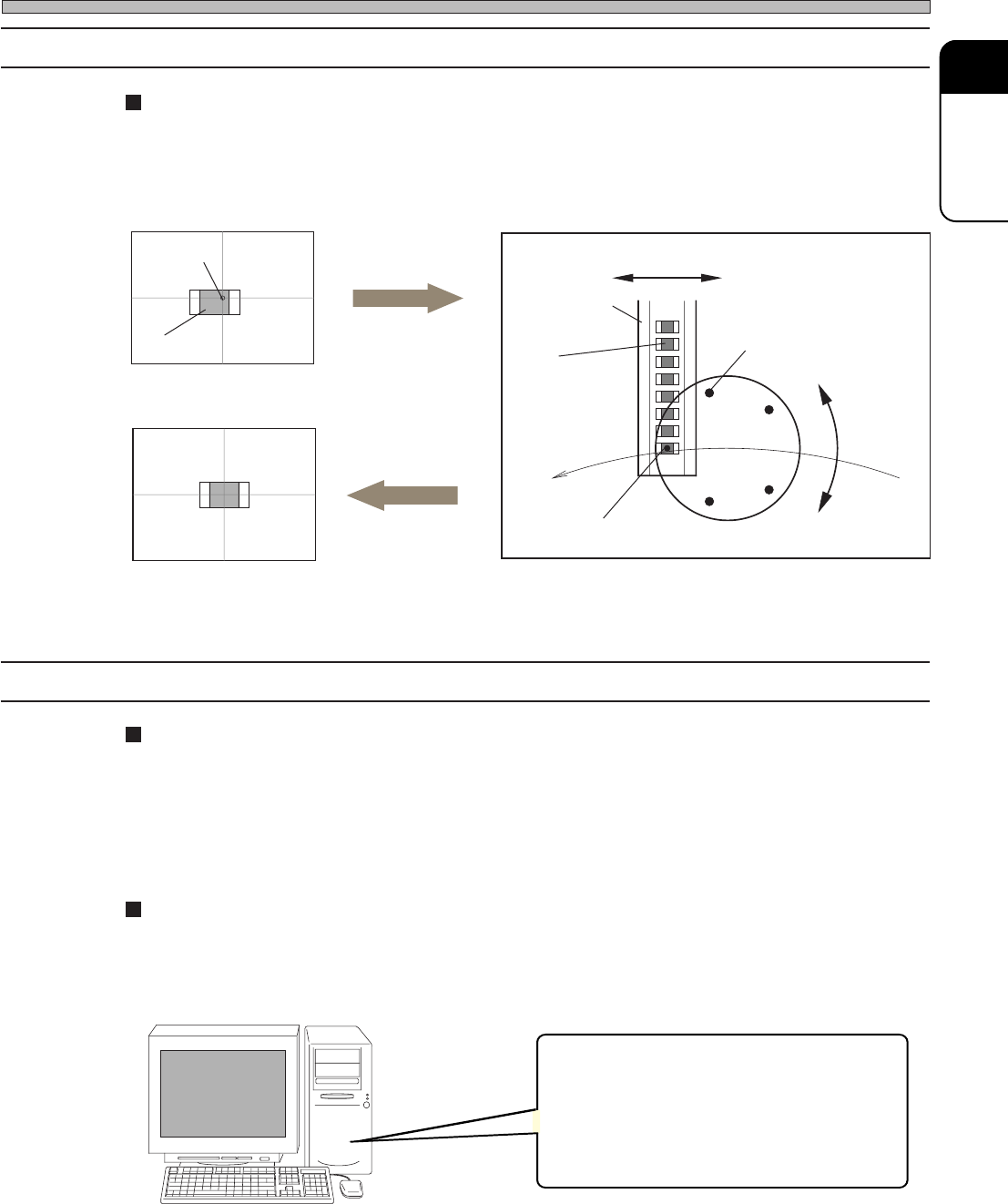
1-1-3 Automatic Correction of the Pickup Position
Processing statistically the recognition image data and carrying out the feedback to it automati-
cally corrects the pickup position of components.
The feeder table corrects X direction and the head rotation corrects Y direction.
By all these, the 1005 chip can be stably picked up.
(CM88S is available for 0603 chip as an option.)
1-1-4 Operational Improvement
Adoption of the LCD color touch panel on the operation device offers very clear vision. It also
offers a selection between Japanese and English instructions.
Tree jump function
The specified screen appears on any screen by using this, and it saves time.
Layered operation
The improper operation is reduced to a minimum by classifying the operating screen into
each mode for the operator and engineer.
Using the data creating unit PT100 enables to create data even during running the machine.
It is possible to create all data of PT100 support models all together.
PT100 support models
High-speed screen printer SP22P
High-speed adhesive dispenser BD30S
High-speed chip mounter CM88
Multi-functional chip mounter CM100
Pickup position
Recognition image
data feedback
X control
Chip
Nozzle
Before correction
Chip
Y control
Pickup position
After correction
Automatic X-Y correction of pickup position
Tape feeder
The system for data creation
PT100
3Y3C-024E
3Y3C-025E 3Y3C-026E
3Y3C-027E
3Y3C-E-EMD01-A01-00
Page 1-6
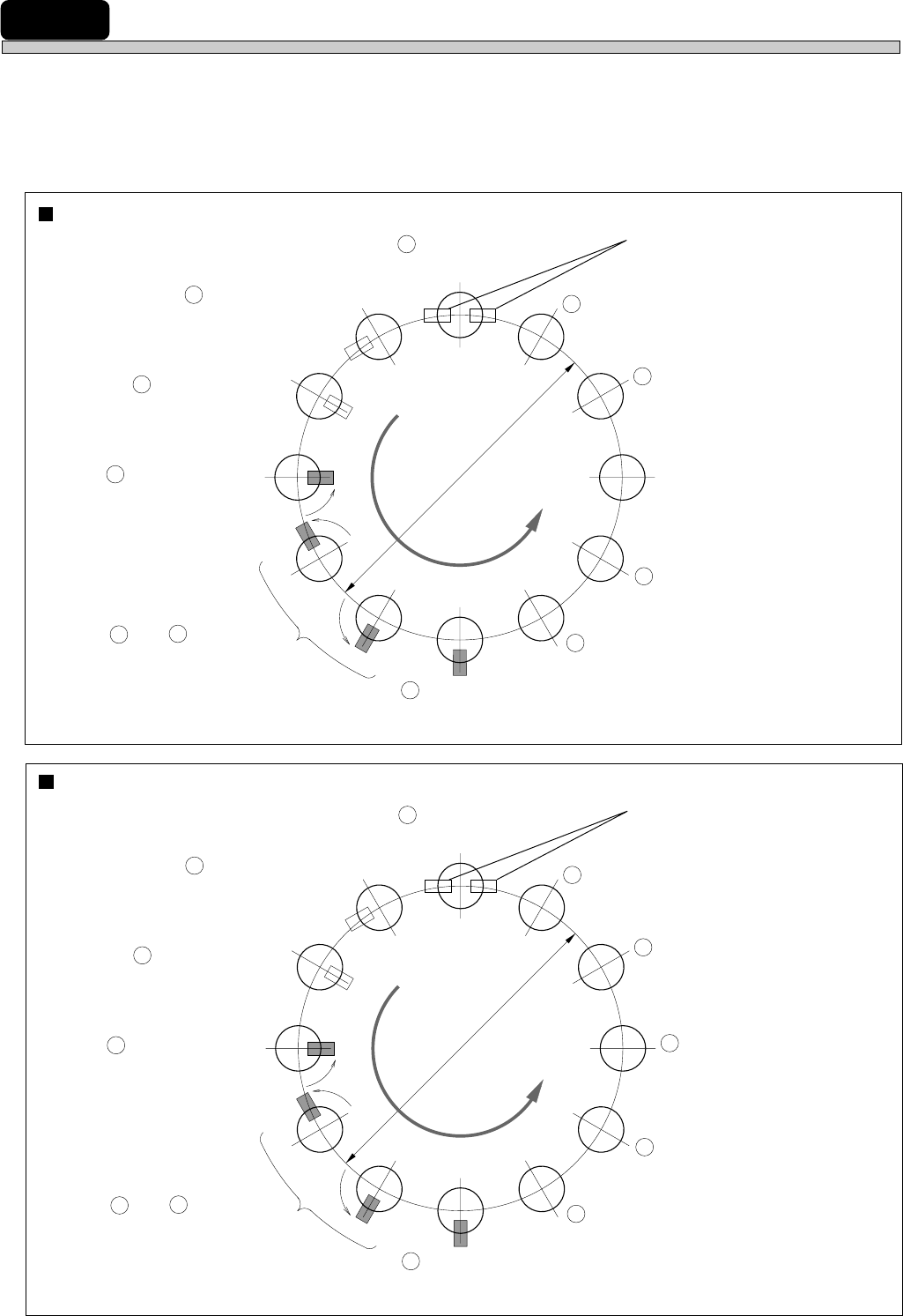
1-2 Operation Theory (Mounting Mechanism)
The machine has 12 mounting heads, each head being equipped with 5 nozzles. Each head
carries out the following operations from 1 to 12 simultaneously at each station (the station ad-
vances two steps during one rotation of the indexing unit) (rotary method).
Diagram of indexing unit
3Y3C-E-EMD01-A01-02
3Y3C-028E
Pickup position (2 points)
1
Chip pickup
(X, Y, and Z control)
2
Height detection
head angular rotation
3
Height detection
4
Chip recognition
5
and
6
Mount angle
correction
Slowly rotates through 2
stations
7
Chip mounting
(X, Y, and Z control)
8
Nozzle selection head angular rotation
9
NG ejecting air blower
10
Nozzle retraction
11
Nozzle extension
12
Pickup angle head angular rotation
Rotating direction
φ
250
3Y3C-028E
CM88C-D
CM88S-M / M1/ MU
Pickup position (2 points)
1
Chip pickup
(X, Y, and Z control)
2
Height detection
head angular rotation
3
Height detection
4
Chip recognition
5
and
6
Mount angle
correction
Slowly rotates through 2
stations
7
Chip mounting
(X, Y, and Z control)
8
Nozzle selection head angular rotation
9
NG ejecting air blower
11
Nozzle extension
Nozzle retraction
12
Pickup angle head angular rotation
Rotating direction
φ
250
Page 1-7
FUNCTIONS
1
Operation Theory (Mounting Mechanism)
3Y3C-E-EMD01-A01-02
∗1: The nozzle extension and nozzle retraction for CM88S-M / M1/ MU are carried out at the same
position. (See the diagram of indexing unit.)
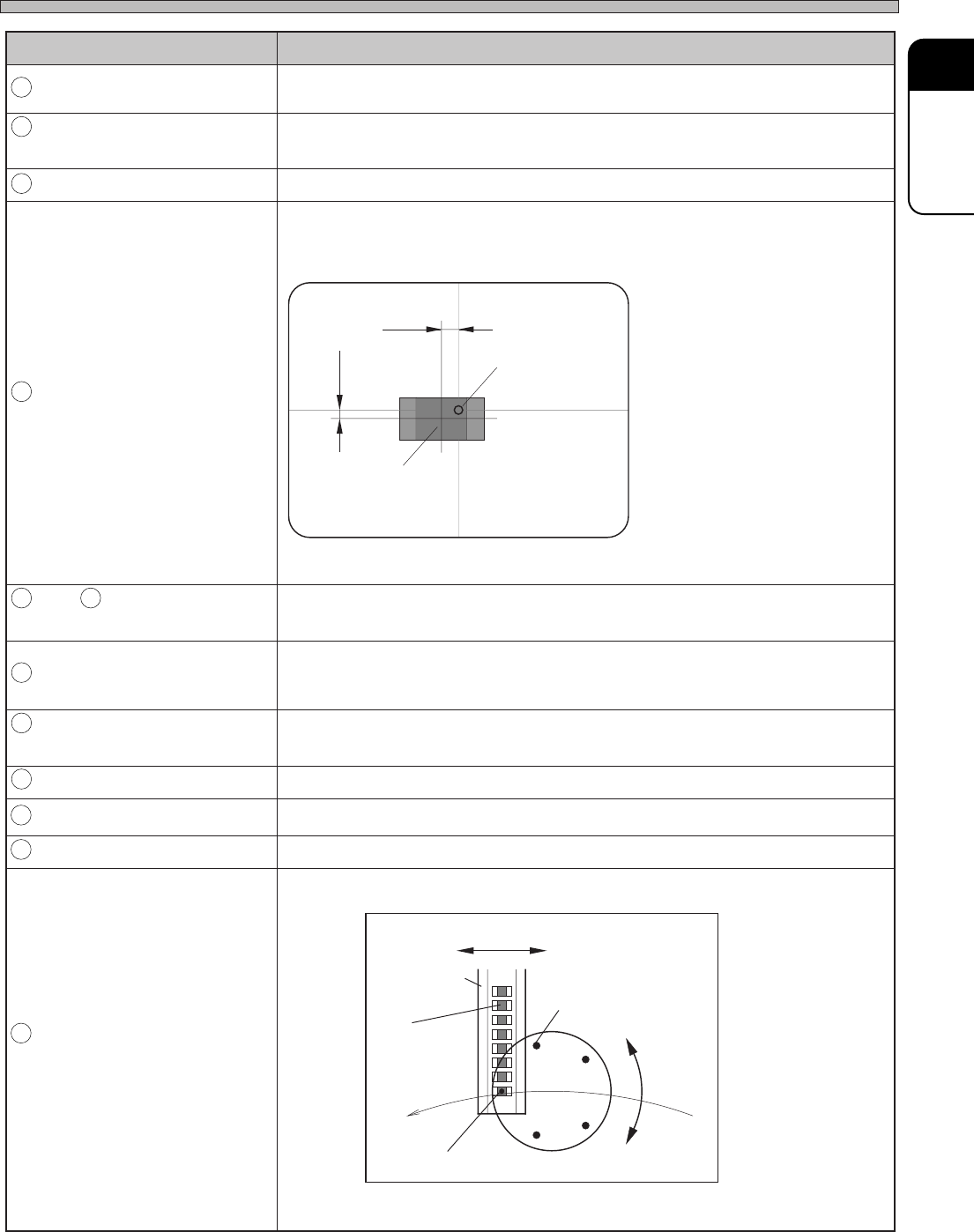
xednI tnemevomfostnetnoC
pukcippihC
retfadna,evirdelbatredeefehtybnoitisoppukcipehtotdevomeraspihC
.spihcehtpukcipotderewolsi)elzzonpukcip(daeheht,defsipihc
daehnoitcetedthgieH
noitatorralugna
rotcetedthgiehehtdnapihcehtneewtebnoitaivedybylnosetatordaehehT
.ssenkcihtpihcetairporppaehterusaemotredroni
noitcetedthgieH
.spihcgnidnatsdnasrorrepukciptcetedotderusaemsissenkcihtpihC
noitingocerpihC
ehtybdezingoceregamiehT.detcetedsinoitaiveddnadezingocereraspihC
gnisopmirepushtiwrotinomTRCehtnodeyalpsidsinoitcesgnizingocerpihc
.noitcnuf
∆ )X(retnecpihcfonoitaiveD:X
∆ )Y(retnecpihcfonoitaiveD:Y
daehgnitnuoMdna
noitatorralugna
.elgnagnitnuompihcfonoitaivedehttcerrocotsetatordaehehT
gnitnuompihC
,elbatY-Xdraobehtybdetcerrocsinoitisopeht,stlusernoitingocerehtgnisU
rofderewolsi)elzzon(daehehtdna,tniopgnitnuomehtotdevomsihcihw
.gnitnuom
daehnoitceleselzzoN
noitatorralugna
.noitisopnoisnetxeelzzonehtotelzzonpukcipehtngilaotdetatorsidaeH
rewolbriagnitcejeGN
.rewolbriaehtybdetcejeeraspihctluafpukciprospihcdaB
noitcarterelzzoN
∗∗
∗
∗∗1
.dednetxesielzzonpukcipehtdnadetcartereradesuylsuoiverpselzzonllA
noisnetxeelzzoN
.dednetxeerapukciprofselzzonehT
ralugnadaehpukciP
noitator
.)lortnocY(noitisoppukcipehtngilaotdetatorsidaehehT
∆Y
∆X
3Y3C-003E
Pickup position
X control
Chip
Nozzle
Chip
Y control
Pickup position
Automatic X-Y correction of pickup position
Tape feeder
3Y3C-026E
1
2
3
4
5 6
7
8
9
10
11
12
3Y3C-032TE