OM-1744-003w.pdf - 第68页
4.2.10 传感器等的 I/O 状态显示 作为装备在送料器的传感器动作状态显示灯,代用 7 段显示的功能。 Procedure (1) 按下 按钮,在 2 秒钟内按下 按钮,将同时按下的状态持续 2 秒钟。 确认已持续了 2 秒钟的操作后,切换到 I/O 状态显示模式。 Note 结束本模式时,通过进行送料器的电源切断或本模式切换操作 ( 上记操 作 ),返回到通常显示模式。 7 段显示部的各段和 I/O( …
4.2.8 连续传送操作
连续反复操作最小间距传送动作。
Procedure
(1)按下 按钮,选择通道。
(2)在封口盖带无松弛状态 ( 封口盖带张紧力检出传感器 ON 状态 ) 下,按
下
按钮,在此状态下,按下 按钮。
同时按下
按钮、 按钮时,持续连续传送。
(3)松开任意按钮。
在该时点,不进行最小间距传送而结束。
Note
按下 按钮时,在封口盖带松弛状态 ( 封口盖带张紧力检出传感器 OFF
状态 ) 下,优先进行封口盖带的上卷动作。
4.2.9 料带传送减速设定的解除
元件数据库中设定料带传送速度的减速时,相应通道的点显示 闪烁,
处于不能进行传送间距设定操作的状态。
要返回到通常状态,需要解除传送减速设定。
Procedure
(1)按下 按钮,选择通道。
(2)按下
按钮,在 2 秒钟内按下 按钮,将同时按下的状态持续
2 秒钟。
确认已持续了 2 秒钟的操作后,点显示
的闪烁变为亮灯,传送间
距设定操作变为可能。
1209-001
4.2操作台的操作
OM-1744
4-7
4.2.10传感器等的 I/O 状态显示
作为装备在送料器的传感器动作状态显示灯,代用 7 段显示的功能。
Procedure
(1)按下 按钮,在 2 秒钟内按下 按钮,将同时按下的状态持续
2 秒钟。
确认已持续了 2 秒钟的操作后,切换到 I/O 状态显示模式。
Note
结束本模式时,通过进行送料器的电源切断或本模式切换操作 ( 上记操
作 ),返回到通常显示模式。
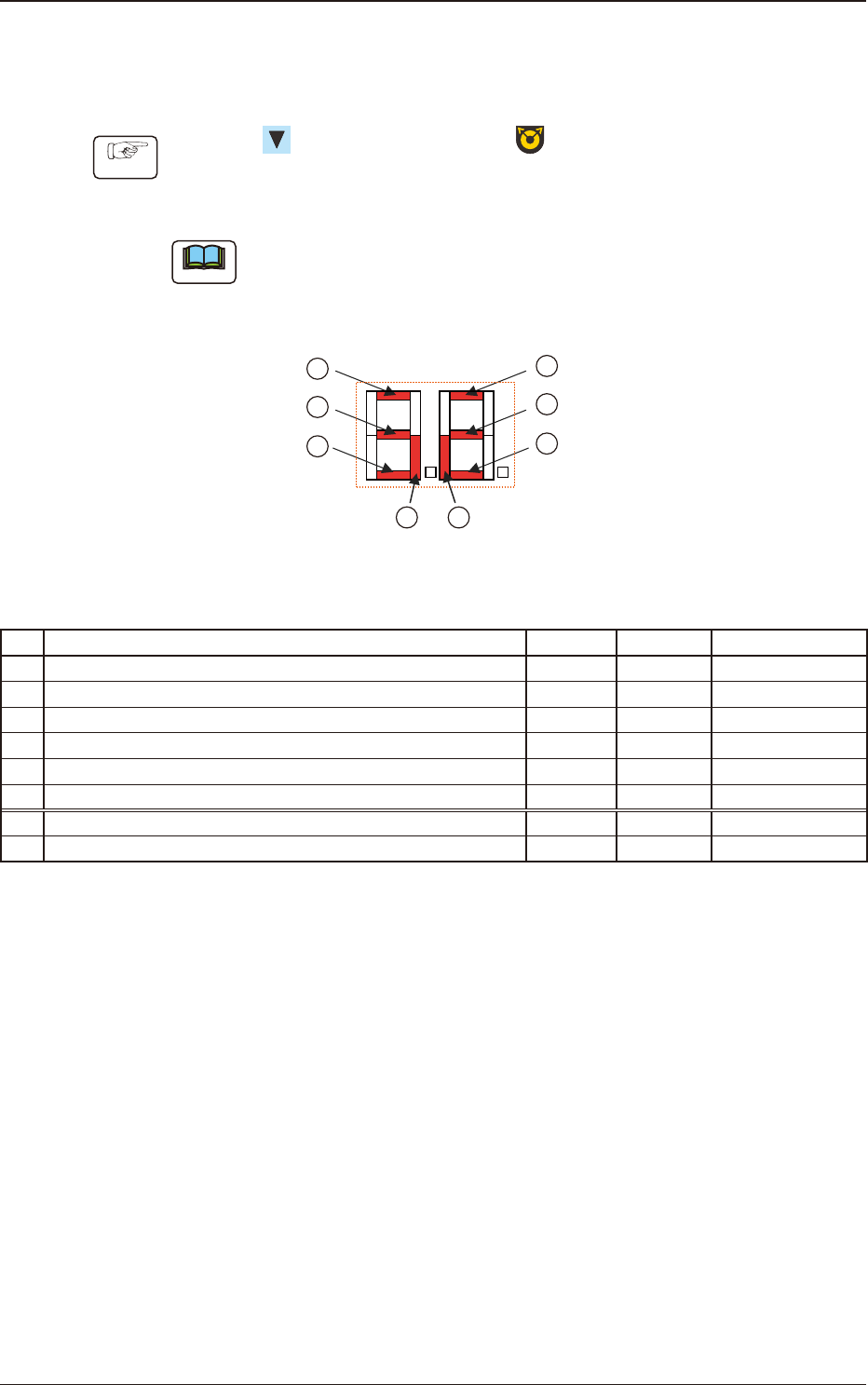
7 段显示部的各段和 I/O( 传感器、信号 ) 的对应如下 :
7段显示部
」
1
7 8
2
3
4
5
6
Fig.D3
TableD1
No. 传感器 / 信号名 亮灯 状态 备注
① 通道 1 连接处检出传感器 ON(Low) 通光 仅限 GD 类型
② 通道 1 封口盖带上卷张紧力检出传感器 ON(Low) 遮光
③ 通道 1 链轮齿原点检出传感器 ON(Low) 磁极检出 仅限 GD-38083
④ 通道 2 连接处检出传感器 ON(Low) 通光 仅限 GD 类型
⑤ 通道 2 封口盖带上卷张紧力检出传感器 ON(Low) 遮光
⑥ 通道 2 链轮齿原点检出传感器 ON(Low) 磁极检出 仅限 GD-38083
⑦ 连接确认信号 ( 向贴装机主机的输出信号 ) ON(Low)
⑧ READY 信号 ( 向贴装机主机的输出信号 ) ON(Low)
1209-001
4.2操作台的操作
OM-1744
4-8
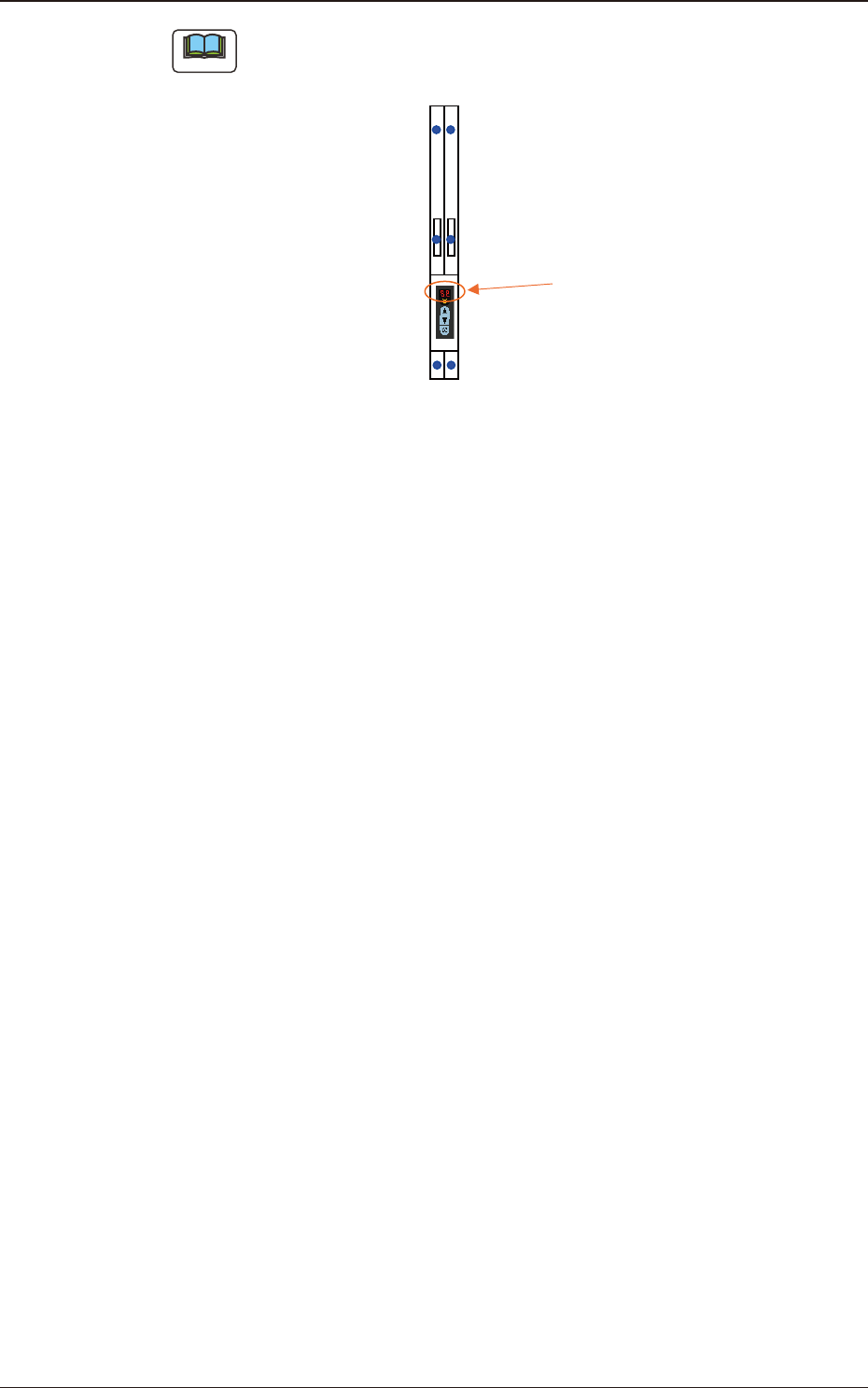
Note
显示部 7 段布局分配成为送料器实际机器的传感器排列图像。
通道2封口盖带上卷张紧力
检出传感器
通道1封口盖带上卷张紧力
检出传感器
通道2链轮齿
原点检出
通道1链轮齿
原点检出
7段显示部
通道2连接处检出
通道1连接处检出
Fig.D4
1209-001
4.2操作台的操作
OM-1744
4-9