识别装置 (HGR-14).pdf - 第16页
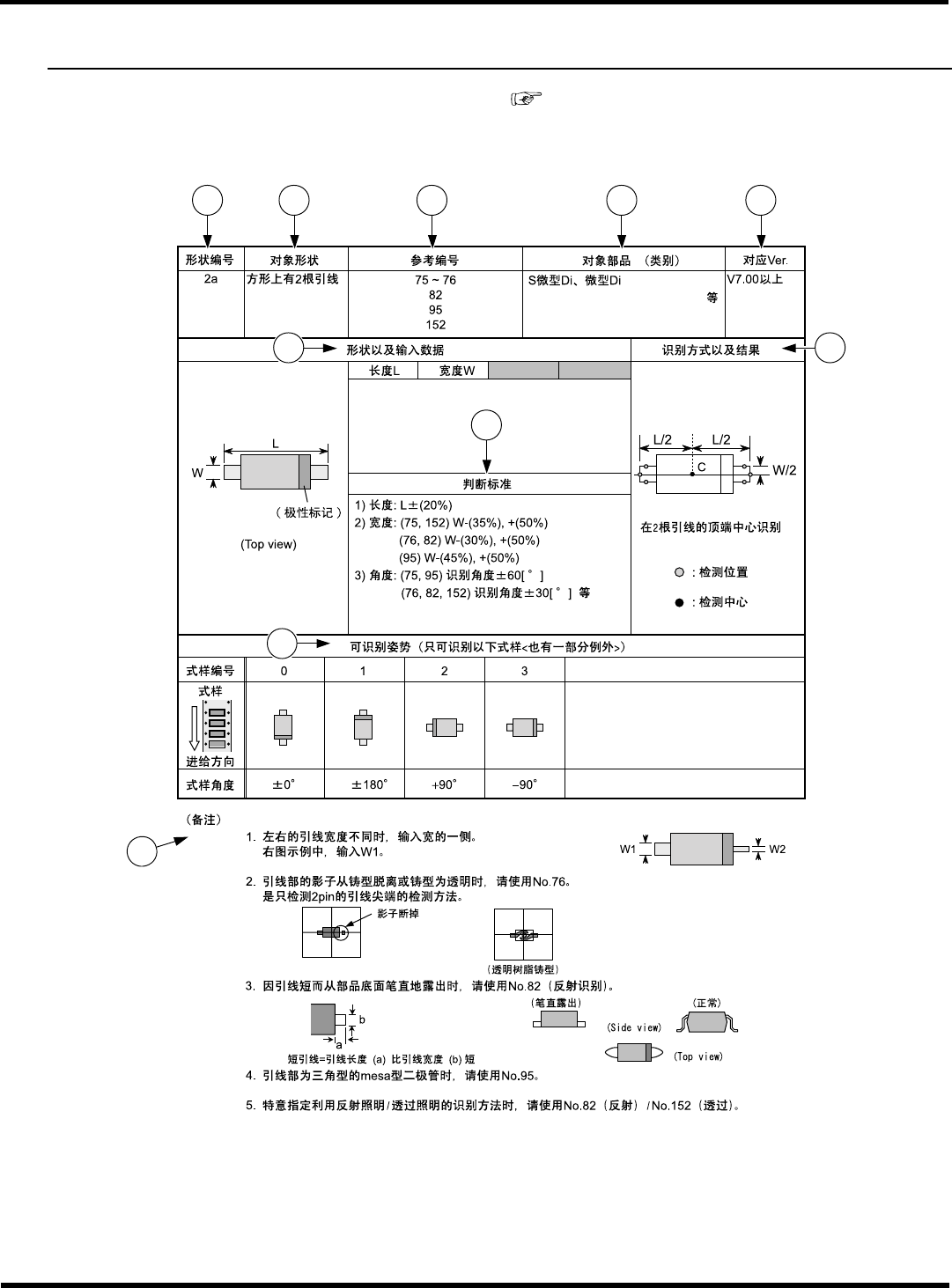
HGR14 附录 1.3 按形 状输入数据项 目 附录 1-16 ① 形状编号 ② 对象形状 以本参考为对象 的外形形状 ③ 参考编号 ④ 对象部品 以本参考为对象 的主要部品 ⑤ 对应 Ver . 只可识别本版本 ⑥ 形状以及输入数据 ⑦ 识别方法以及结果 ⑧ 判断标准 轮廓识别的必要 数据以及识别的简单 说明 (数据输入项目 中,网状部分是不需 要的数据,请务必输 入“ 0 ”。 ) ⑨ 可识别姿势 因参考不同,可 识别姿势也不同。…
HGR14
附录 1.3 按形状输入数据项目
附录 1-15
1.
附录
附录附录
附录
1.3
按形状输入数据项目
按形状输入数据项目按形状输入数据项目
按形状输入数据项目
轮廓识别根据形状不同规定了参考编号。( 附录 1.2.1 轮廓识别形状一览)
请参阅与各形状相对应的个别项目。个别项目如图 3-1 所示。
∗
另外由于错误设定,参考编号或者输入数据会造成识别率的低下、误实装,请正确设定。
图 3
−
1 轮廓识别个别项目示例
HGR14-C-PMA01-A02-01
HGR14-005C
1
2 3 4
5
6
9
8
7
10

HGR14
附录 1.3 按形状输入数据项目
附录 1-16
① 形状编号
② 对象形状
以本参考为对象的外形形状
③ 参考编号
④ 对象部品
以本参考为对象的主要部品
⑤ 对应 Ver.
只可识别本版本
⑥ 形状以及输入数据
⑦ 识别方法以及结果
⑧ 判断标准
轮廓识别的必要数据以及识别的简单说明
(数据输入项目中,网状部分是不需要的数据,请务必输入“0”。)
⑨ 可识别姿势
因参考不同,可识别姿势也不同。
⑩ (备注)
轮廓识别方面的注意事项等。请务必阅读。
HGR14-C-PMA01-A02-01
HGR14
附录 1.3 按形状输入数据项目
附录 1-17
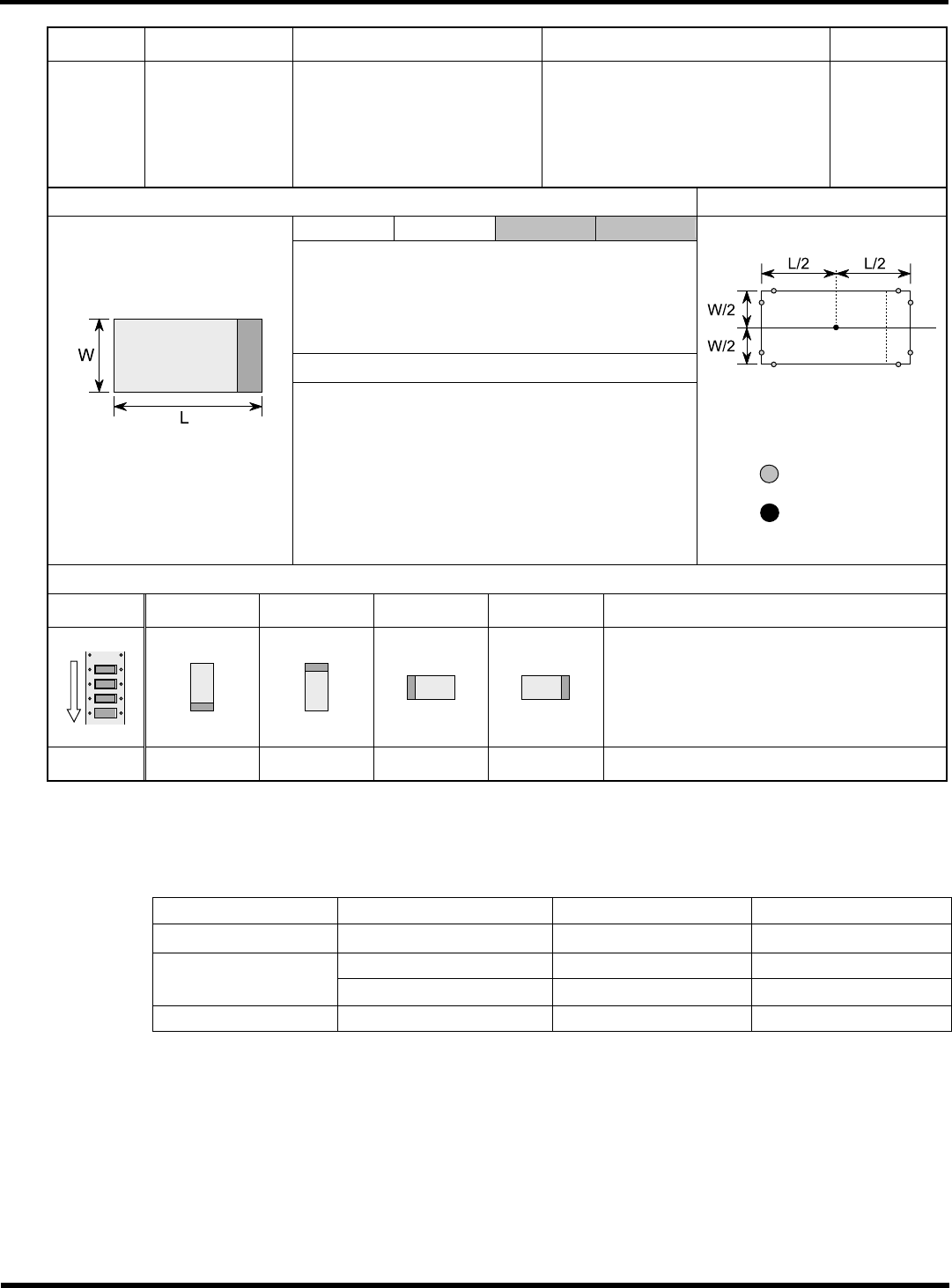
形状编号
对象形状
参考编号
对象部品(类别)
对应
Ver.
1a
1d
角部是锐角的长方形
角部是锐角的正方形
51 ~ 56
88
89
157
固定电阻
电容器
片式电感器
微调电容器
过滤器
等
V7.00
以上
形状以及输入数据
识别方式以及结果
长度
L
宽度
W
判断标准
1)
长度
: L
−
(20%),
+
(10% ~ 20%)
2)
宽度
: W
−
(15% ~ 35%),
+
(20%)
3)
对边平行度
: (51 ~ 54)
±
7.5[
°
]
(55 ~ 56)
±
5.0[
°
]
4)
邻边直交度
: 90
±
8[
°
]
(Top view)
5)
角度
: (
长方形
)
识别角度
±
60[
°
]
(
正方形
)
识别角度
±
30[
°
]
(0603)
识别角度
±
10[
°
]
等
在拐角以及直线部位进行识别
(只有
3
点拐角也可进行识别)
:
检测位置
:
检测中心
可识别姿势(只可识别以下式样
<
也有一部分例外
>
)
式样编号
0 1 2 3
式样
进给方向
式样角度
±
0
°
±
180
°
+
90
°
−
90
°
(备注)
1. 芯片尺寸输入值 (长度 L) / (宽度 W) 在 1.2 以内时,自动变为形状编号“1d”的识别,可识别角度变为
±
30[
°
]。此时,吸着角度由式样角度超过 60[
°
]的话,有可能旋转 90[
°
]进行实装,请注意吸着状态。
2. 因参考编号、芯片尺寸不同,芯片尺寸容许也不同。
参考编号
对象部品
L
尺寸容许
W
尺寸容许
54
宽度
(W)
和厚度
(T)
接近
−
20%,
+
10%
−
35%,
+
20%
1005
尺寸以上
−
20%,
+
10%
−
15%,
+
20%
55 ~ 56
0603
尺寸以下
−
20%,
+
20%
−
15%,
+
20%
除上述之外
1005
尺寸以上
−
20%,
+
10%
−
25%,
+
20%
3. 进行电阻的正反面反转检查时,请使用 No.89 (放射) 。
(条件 1) 表面的玻璃层涂部为黑色,并应在部品中央部全体没有写入无反射文字。
吸嘴尖端部不是黑色时,请使用比部品要小的吸嘴。
4. 特意指定利用反射照明/透过照明的识别方法时,请使用 No.88 (反射) /No.157 (透过)。
5. 使用 No.55 ~ 56 的 0603 尺寸部品时,因为吸着位置有限制,识别结果的 XY 也产生限制。
(识别 XY 极限) 部品 L 方向:
±
0.2 [mm] 部品 W 方向:
±
0.1 [mm]
HGR14-C-PMA01-A02-01