识别装置 (HGR-14).pdf - 第44页
HGR14 附录 1.3 按形 状输入数据项 目 附录 1-44 • 在画面中央部将 会显示出已补正好的 部品画像 X/ Y / θ 。 ∗ 平时在此不必进 行图像旋转或移动。 但,部品 未到画面中央位 置或部品向 θ 方向倾斜时 , 请进 行 X/ Y / θ 的微小调整 。 5. 按 [ 球区域设定 ] 。 ∗ 显示白色线的 BOX 以后, 通过移动键 / 扩大 / 缩小键来设定有 球存在的最大区域。 平时,请 配合部品外形。 ∗ …
HGR14
附录 1.3 按形状输入数据项目
附录 1-43
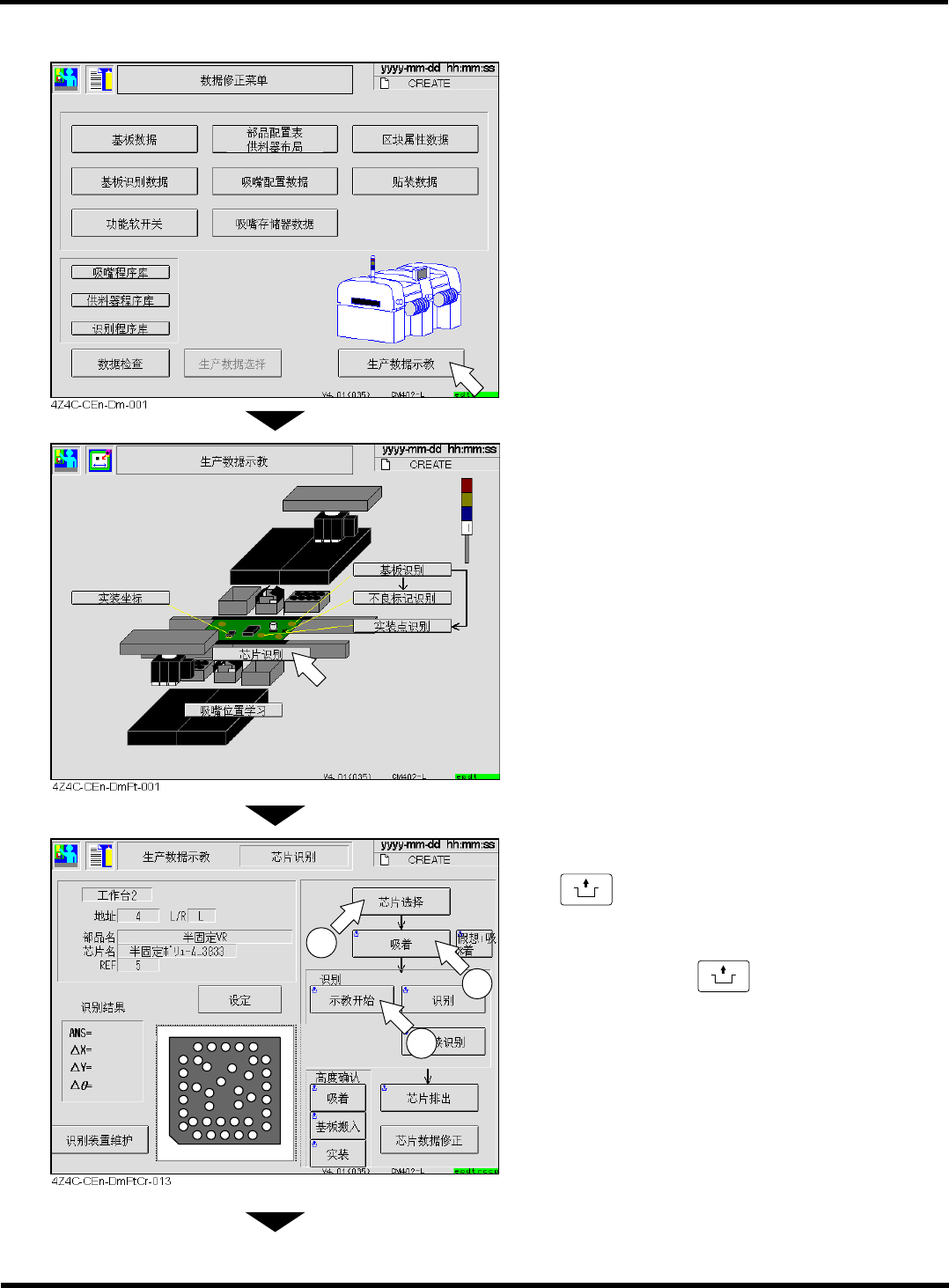
<示教>
1.
在主菜单的<数据修正菜单>画面上按[生
产数据示教]。
2.Press [Chip Recoh]
3.
通过[芯片选择]选择对象部品后再按
UNLOCK
+ [吸着]。
4.
按操作面板的
UNLOCK
+ [示教开始]。
下一页
HGR14-C-PMA01-A02-01
HGR14-017E
3
2
1
HGR14
附录 1.3 按形状输入数据项目
附录 1-44
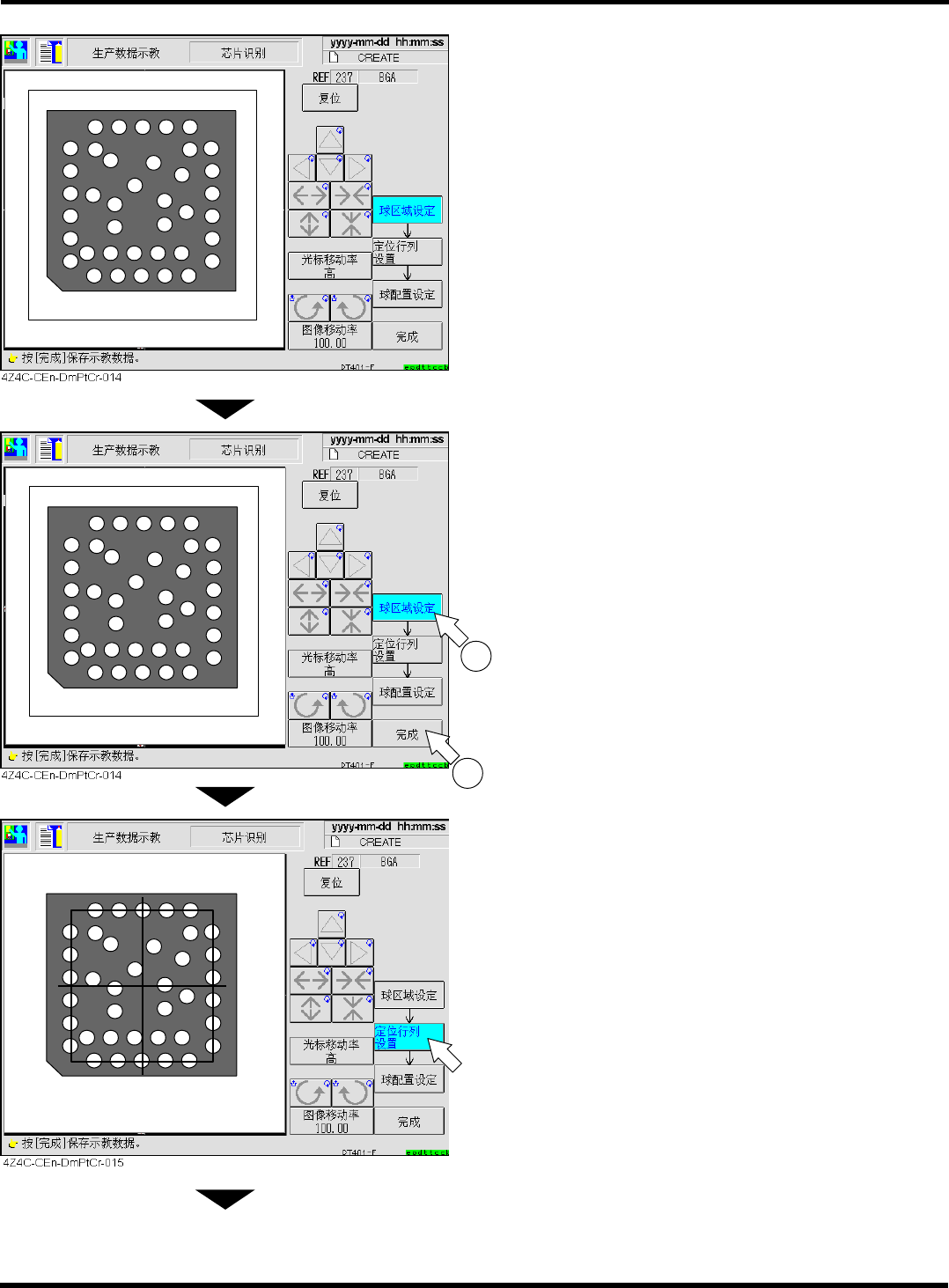
•
在画面中央部将会显示出已补正好的部品画像
X/Y/
θ
。
∗
平时在此不必进行图像旋转或移动。但,部品
未到画面中央位置或部品向
θ
方向倾斜时,请进
行 X/Y/
θ
的微小调整。
5.
按[球区域设定]。
∗
显示白色线的 BOX 以后,通过移动键/扩大/
缩小键来设定有球存在的最大区域。平时,请
配合部品外形。
∗
按[完成]后进行下一作业。
6.
按[定位行列设置]。
∗
显示带有白色交叉线的 BOX 后,请设定在部品
定位时识别的球行列上。
•
将会开始焊锡球的自动抽出。
下一页
HGR14-C-PMA01-A02-01
HGR14-018E
HGR14-018E
1
2
HGR14-019E
HGR14
附录 1.3 按形状输入数据项目
附录 1-45
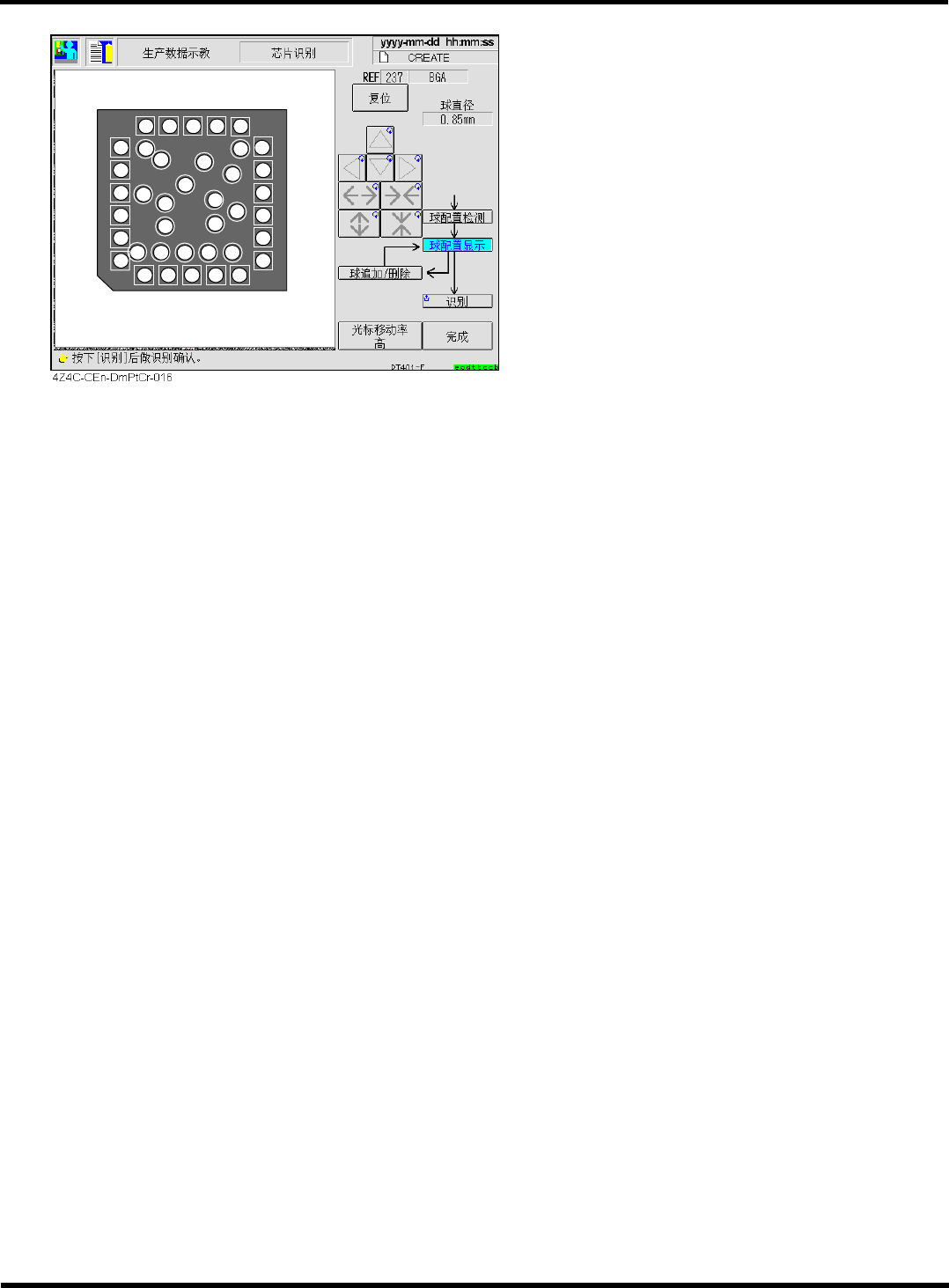
•
完成焊锡球的抽出后在画面上将会显示出其结
果。
∗
能确认全焊锡球是否都抽出,示教作业则完成。
∗
做完上述作业,示教作业则完成。但,在焊锡球的自动抽出时如果有不能检测的焊锡球,请按照
下页步骤进行追加焊锡球位置。
HGR14-C-PMA01-A02-01
HGR14-020E