识别装置 (HGR-14).pdf - 第63页
HGR14 附录 1.4 轮廓 识别错误信息 附录 1-63 图 . 4 - 2 识别画面的坐 标系 ∗ 使用线路照相机 的识别,不显示生产 中的画面。 附录 附录 附录 附录 1. 4 . 2 生产后的识别信息 生产后的识别信息 生产后的识别信息 生产后的识别信息(存储功能) (存储功能) (存储功能) (存储功能) 存储过去出现的 识别错误,生产后也 能够确认错误内容 。 请用于对策参考 方面。( 附录 1.4. 3 识别错误信 息…
HGR14
附录 1.4 轮廓识别错误信息
附录 1-62
1. ·0000
附录
附录附录
附录
1.4
轮廓识别错误信息
轮廓识别错误信息轮廓识别错误信息
轮廓识别错误信息
附录
附录附录
附录
1.4.1
生产中的显示
生产中的显示生产中的显示
生产中的显示
轮廓识别(参考 No.51 以后)时,通过显示在画面上的识别结果代码(A:或者 ANS:),可以知道
识别结果。
识别结果代码 50 以上
:
识别正常结束(显示识别结果坐标、斜度)
上述以外
:
识别错误(不可)
所谓识别错误(不可)是指判定为不可识别或者不良部品的情况。
通过识别结果代码可以确认其内容。
( 附录 1.4.3 识别错误信息一览)
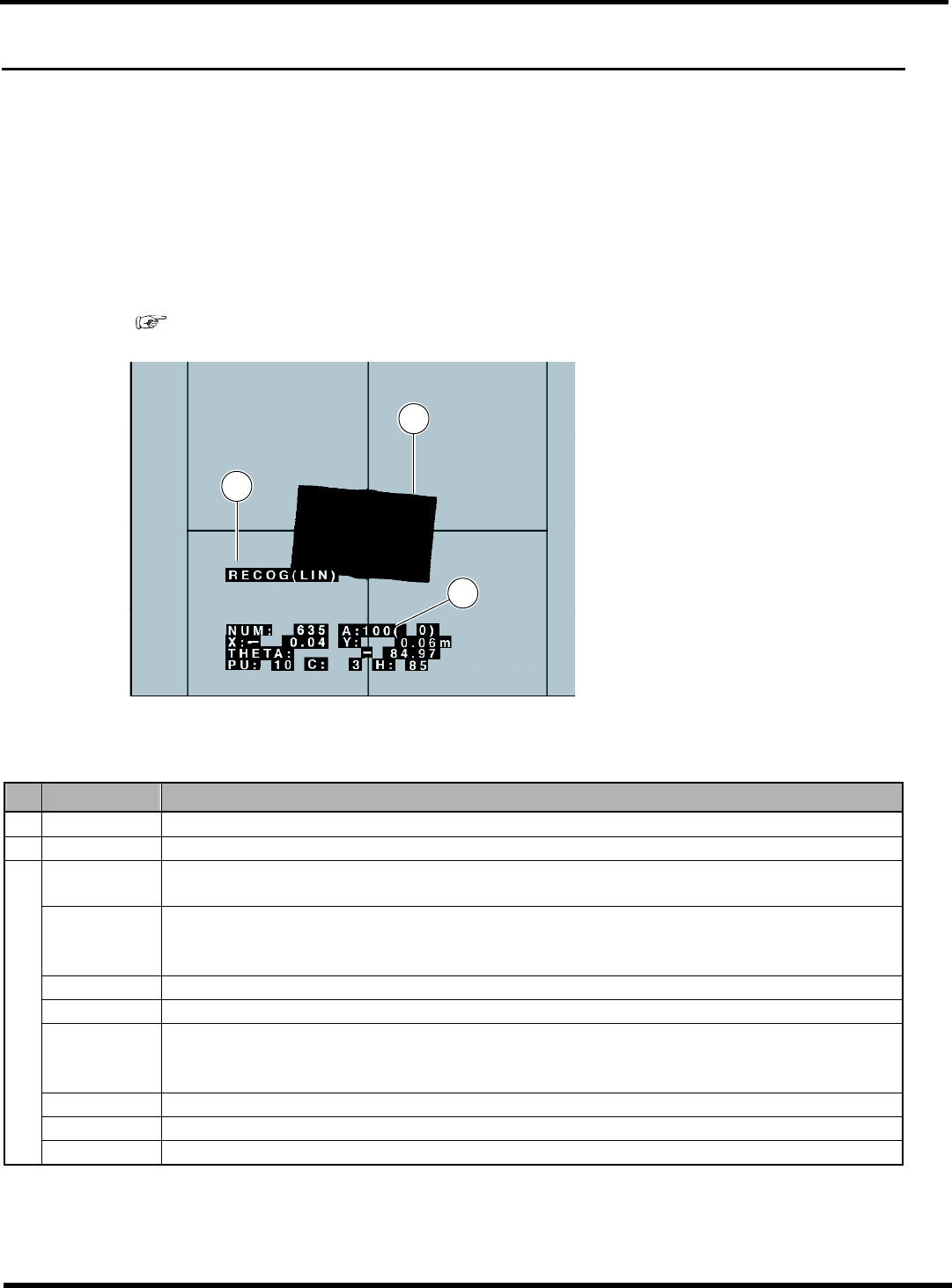
图. 4-1 识别结果画面(运转时)
No.
名称 说明
表示轮廓识别。
识别对象
NUM
轮廓点数
表示识别对象的轮廓象素点数。
A
识别结果代码
显示识别结果。
识别错误时,根据代码编号,能够知道内容。
X
识别结果 X 坐标[mm]
Y
识别结果 Y 坐标[mm]
THETA
识别结果斜度[
°
]
识别正常结束时,显示识别对象的位置(XY 坐标)以及斜度。
识别错误时,全部显示为 0。
PU
装置编号(PU 编号)
C
芯片编号
H
吸头编号
∗
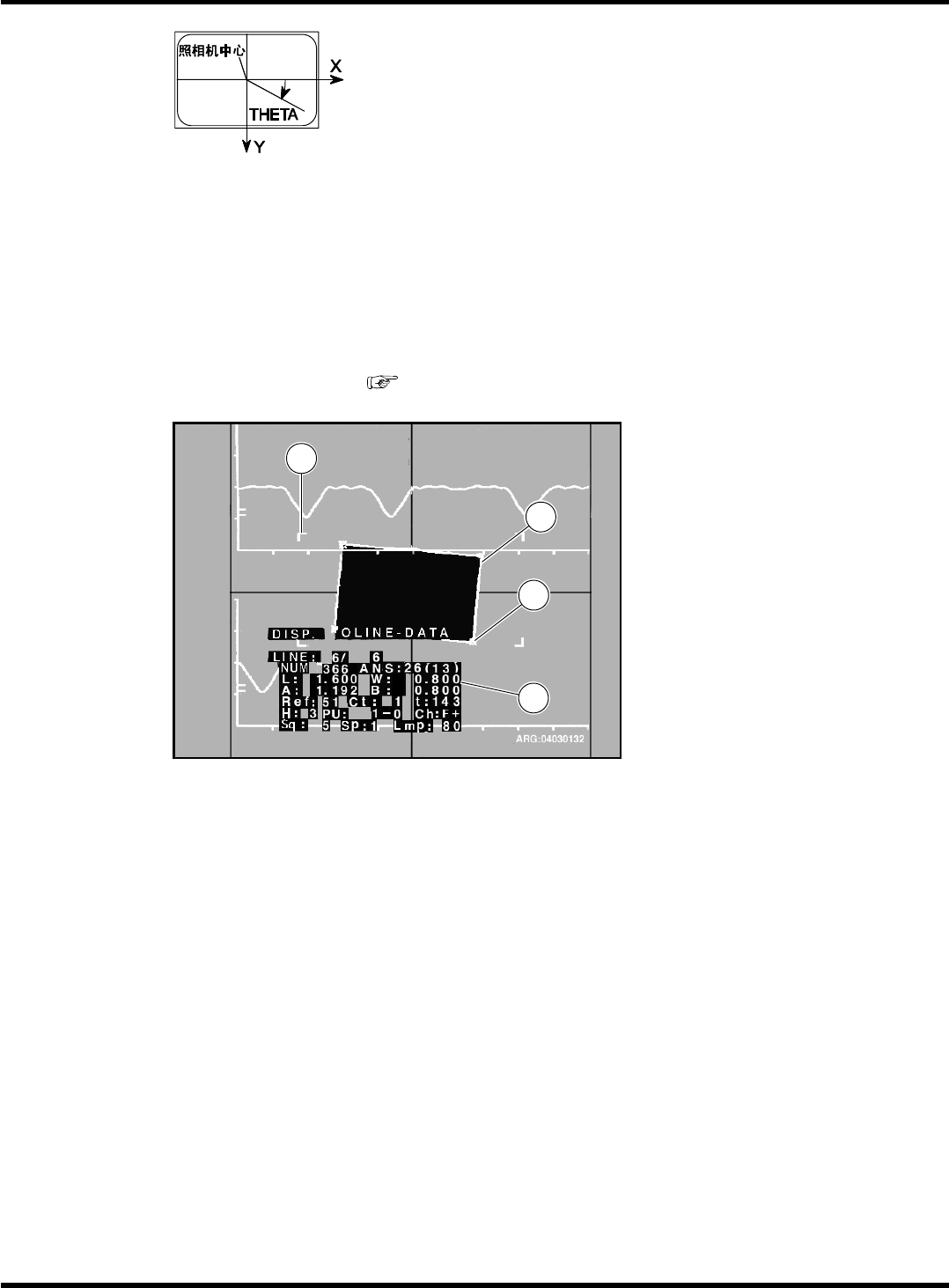
识别结果坐标显示距照相机中心(十字线中心)的距离。(图. 4-2)
HGR14-C-PMA01-A03-01
HGR14-003C
1
2
3
HGR14
附录 1.4 轮廓识别错误信息
附录 1-63
图. 4-2 识别画面的坐标系
∗
使用线路照相机的识别,不显示生产中的画面。
附录
附录附录
附录
1.4.2
生产后的识别信息
生产后的识别信息生产后的识别信息
生产后的识别信息(存储功能)
(存储功能)(存储功能)
(存储功能)
存储过去出现的识别错误,生产后也能够确认错误内容。
请用于对策参考方面。(
附录 1.4.3 识别错误信息一览)
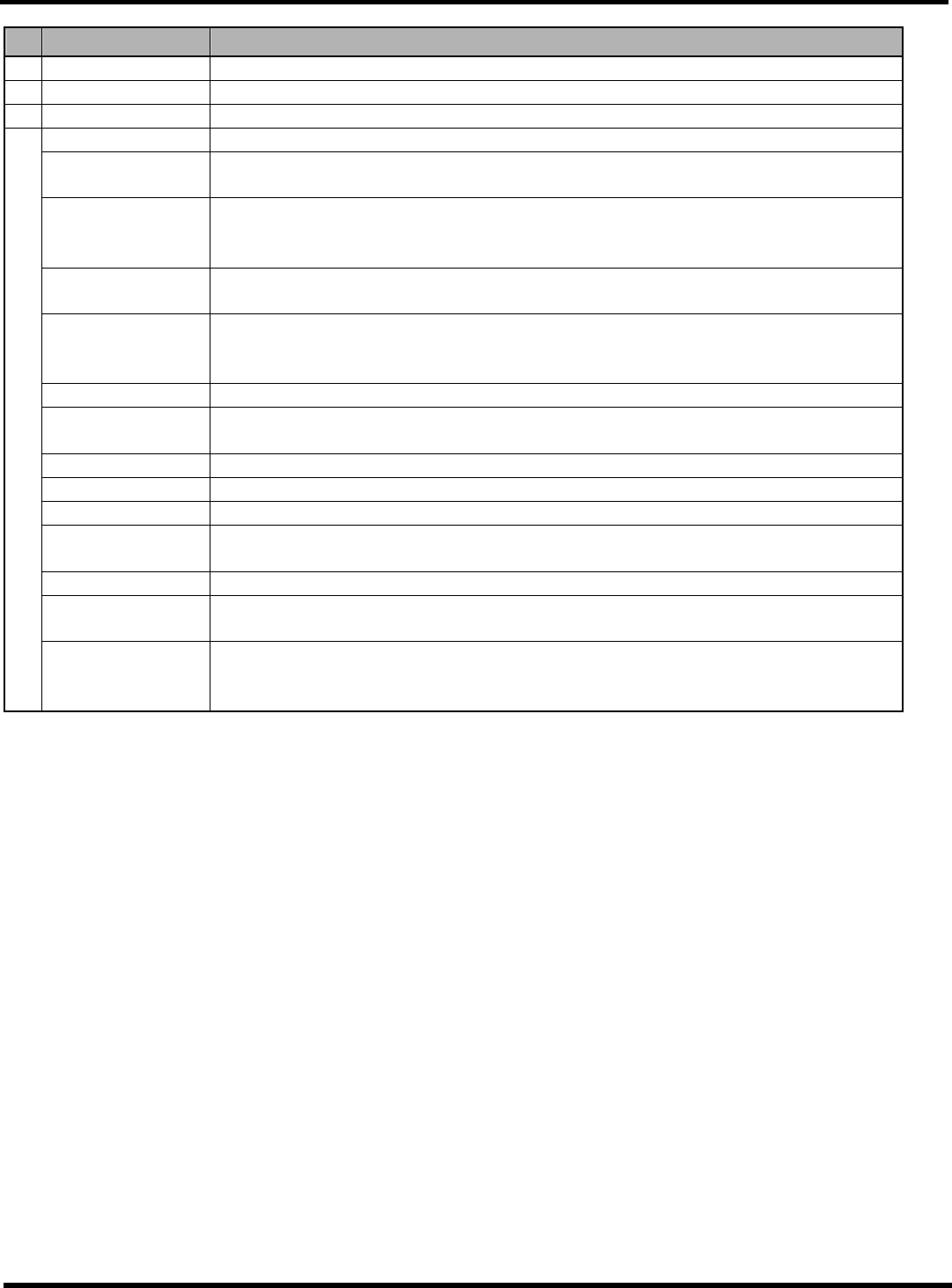
图. 4-3 识别错误画面
4Z4C-001P
1
2
4
3
HGR14-C-PMA01-A03-01
HGR14
附录 1.4 轮廓识别错误信息
附录 1-64
No.
名称 说明
芯片数据尺寸 显示由主体传送的芯片数据的外径尺寸。
轮廓 显示识别对象的轮廓。
特征 (
∗
) 显示提取出来的特征。(最多 20 个)
LINE
(当前的场面编号)/(全场面数)
NUM
轮廓点数
显示识别对象的轮廓象素点数。
ANS
识别结果代码
显示识别结果。
识别错误时,通过代码编号,能够知道内容。
L、 W
芯片数据 L、W
显示由主体传送的芯片数据信息。
A、 B
参考信息
存储识别错误内容的参考值。
识别结果代码不同,内容也不同。
Ref
参考编号
Ct
特征符号
显示提取出来的特征符号。
t
临界值
H
吸嘴编号或者吸头编号
PU
装置编号
Ch
使用线路照相机(前/后)和扫描方向
F: 前 R: 后+: 正扫描 -: 负扫描
Sq
实装顺序
Sp
线路照相机扫描速度
1: 低速 2: 中速 3: 高速
Lmp
主要使用的灯值
如果是透射识别,就是透射照明值
如果是反射识别,就是反射照明值
[参考示例]
图.4-3 的例子中,通过 ANS.(识别结果代码)26 可以知道 L(长度)为异常。
另外,与从主体传送的芯片数据 L: 2.00、W: 1.25 的外径尺寸显示相比较,由于实际轮廓大,可以
推测识别错误的原因为 1)部品的设定错误(装置 1 号的误贴装)和 2)芯片数据的 LW 尺寸错误,
从而容易发现异常原因。
HGR14-C-PMA01-A03-01