识别装置 (HGR-14).pdf - 第25页
HGR14 附录 1.3 按形 状输入数据项 目 附录 1-25 形状编号 对象形状 参考编号 对象部品 (类别) 对应 Ver. 2b 方形上有 3 根引线 61 ~ 68 83 100 103 153 SS 微型 Di 、 S 微型 Di 、微型 Di SS 微型 Tr 、 S 微型 Tr 、微型 Tr 等 V7.0 0 以上 形状以及 输入数据 识别方式 以及结果 长度 L 宽度 W 判断标准 1) 长度 : L ± (2 0% …
HGR14
附录 1.3 按形状输入数据项目
附录 1-24
形状编号
对象形状
参考编号
对象部品
(类别)
对应
Ver.
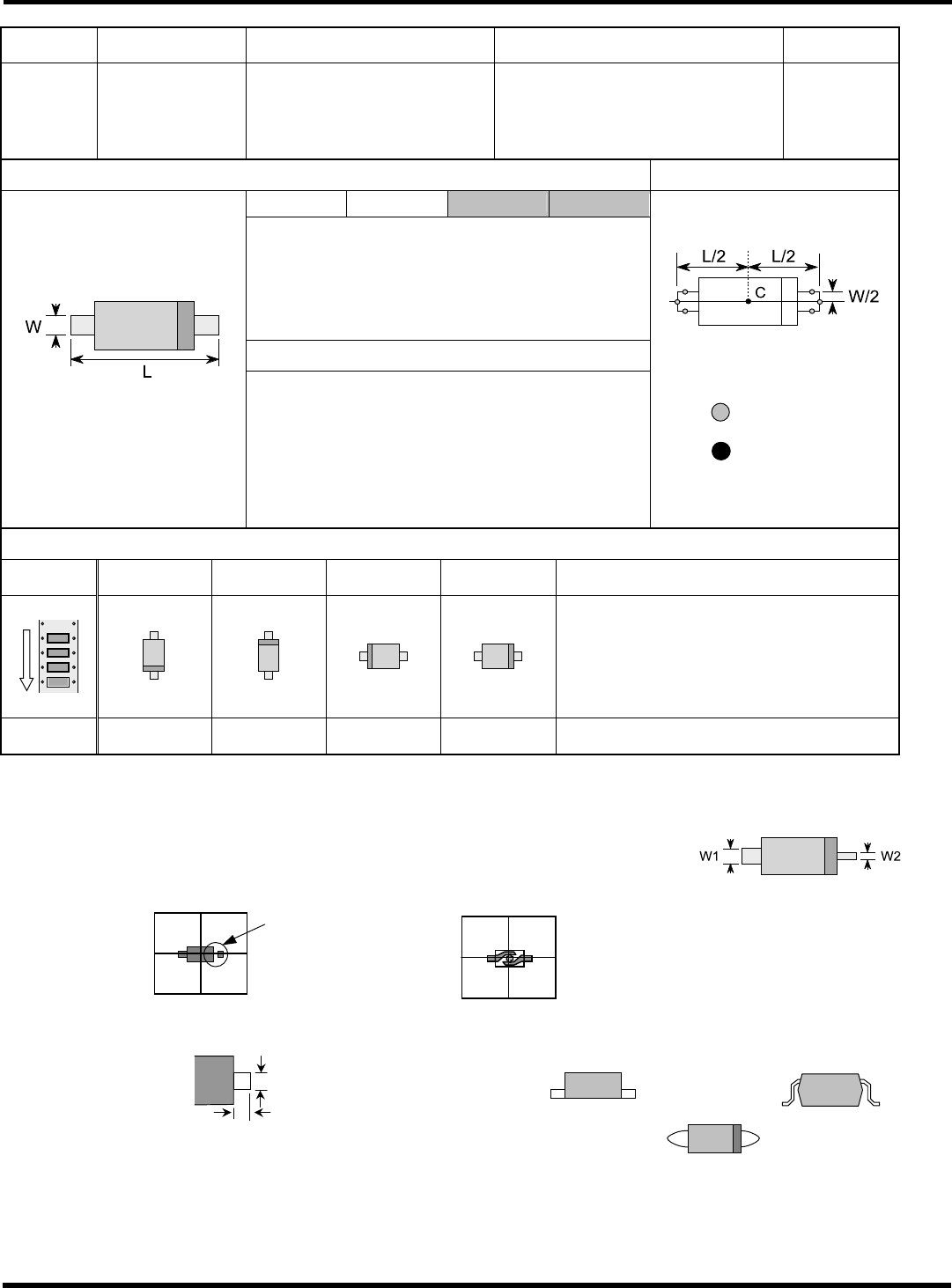
2a
方形上有
2
根引线
75 ~ 76
82
95
152
S
微型
Di
、微型
Di
等
V7.00
以上
形状以及输入数据
识别方式以及结果
长度
L
宽度
W
判断标准
1)
长度
: L
±
(20%)
2)
宽度
: (75, 152) W
−
(35%),
+
(50%)
(76, 82) W
−
(30%),
+
(50%)
(95) W
−
(45%),
+
(50%)
3)
角度
: (75, 95)
识别角度
±
60[
°
]
(Top view)
(76, 82, 152)
识别角度
±
30[
°
]
等
在
2
根引线的顶端中心识别
:
检测位置
:
检测中心
可识别姿势(只可识别以下式样
<
也有一部分例外
>
)
式样编号
0 1 2 3
式样
进给方向
式样角度
±
0
°
±
180
°
+
90
°
−
90
°
(备注)
1. 左右的引线宽度不同时,输入宽的一侧。
右图示例中,输入 W1。
2. 引线部的影子从铸型脱离或铸型为透明时,请使用 No.76。是只检测 2pin 的引线尖端的检测方法。
影子断掉
(
透明树脂铸型
)
3. 因引线短而从部品底面笔直地露出时,请使用 No.82 (反射识别)。
(
笔直露出
)
(
正常
)
(Side view)
短
引线
=
引线长度
(a)
比
引线宽度
(b)
短
(Top view)
4. 引线部为三角型的 mesa 型二极管时,请使用 No.95。
5. 特意指定利用反射照明/透过照明的识别方法时,请使用 No.82 (反射) /No.152 (透过)。
b
a
HGR14-C-PMA01-A02-01
HGR14
附录 1.3 按形状输入数据项目
附录 1-25
形状编号
对象形状
参考编号
对象部品
(类别)
对应
Ver.
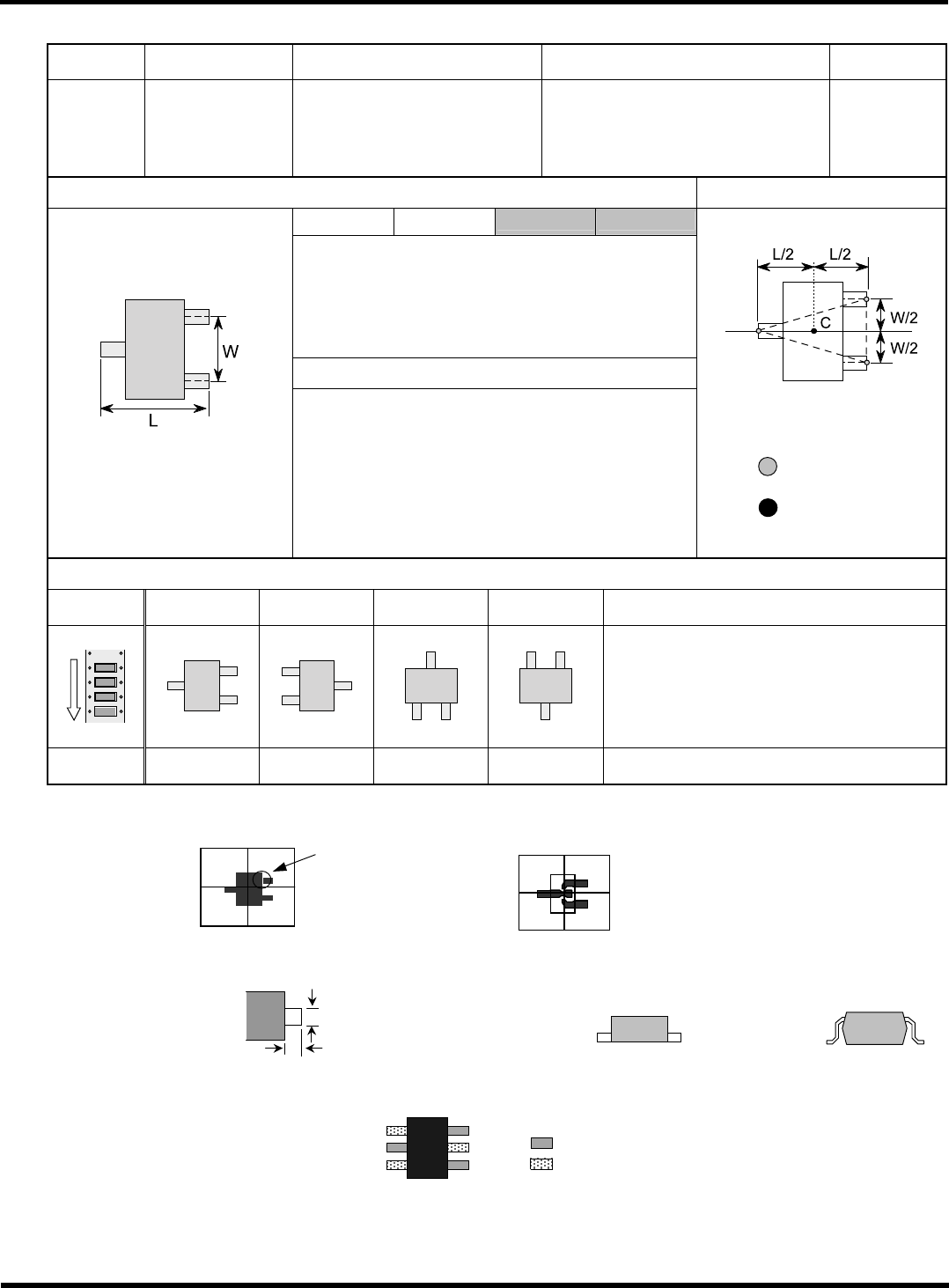
2b
方形上有
3
根引线
61 ~ 68
83
100
103
153
SS
微型
Di
、
S
微型
Di
、微型
Di
SS
微型
Tr
、
S
微型
Tr
、微型
Tr
等
V7.00
以上
形状以及输入数据
识别方式以及结果
长度
L
宽度
W
判断标准
1)
长度
: L
±
(20%)
2)
宽度
: W
±
(20%)
3)
二等边的比
:
±
10%
4)
三角形的直交度
: 90
±
10[
°
]
(Top view)
5)
角度:
(61 ~ 68, 103)
识别角度
±
90[
°
]
(83, 100)
识别角度
±
30[
°
]
等
在
3
根引线的尖端中心识别
:
检测位置
: 检测中心
可识别姿势(只可识别以下式样
<
也有一部分例外
>
)
式样编号
0 1 2 3
式样
进给方向
式样角度
±
0
°
±
180
°
+
90
°
−
90
°
(备注)
1. 引线部的影子从铸型脱离或铸型为透明时,请使用 No.100。是只检测 3pin 的引线尖端的检测方法。
影子断掉
(透明树脂铸型)
2. 因引线短而从部品底面笔直地露出时,请使用 No.83 (反射识别)。
(
笔直露出
)
(正常)
短引线=引线长度
(a)
比引线宽度
(b)
短
(Side view)
3. 检测要检测的 3 根引线以外有无不需要的引线(防止误设定其他部品)时,请使用 No.103。
被检测的引线
不需要的引线检查位置
4. 特意指定利用反射照明/透过照明的识别方法时,请使用 No.83 (反射) /No.153(透过)。
b
a
HGR14-C-PMA01-A02-01
HGR14
附录 1.3 按形状输入数据项目
附录 1-26
形状编号
对象形状
参考编号
对象部品
(类别)
对应
Ver.
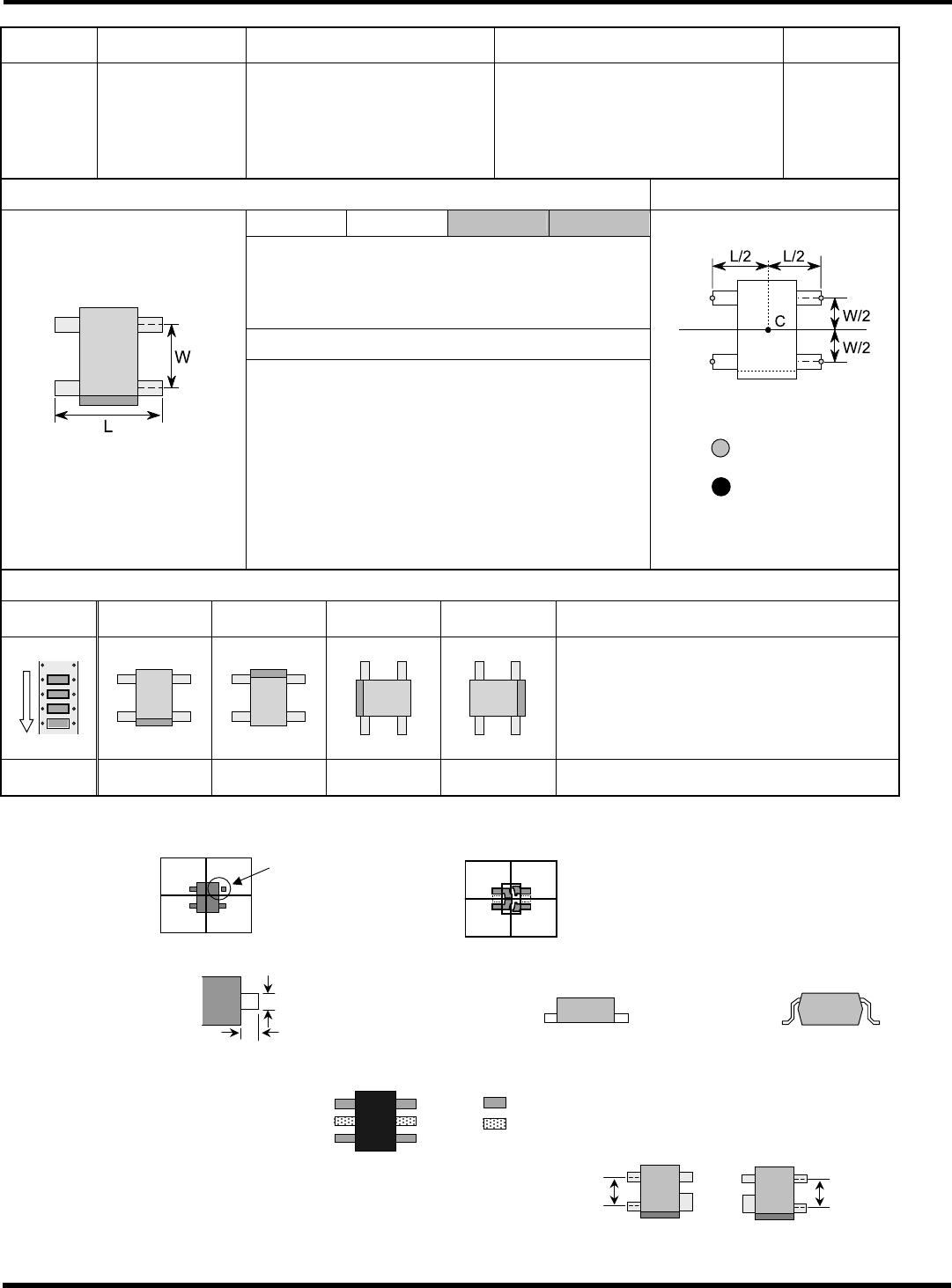
2c
方形上有
4
根引线
69
84
104
120
123 ~ 124
154
SS
微型
Di
、
S
微型
Di
、微型
Di
SS
微型
Tr
、
S
微型
Tr
、微型
Tr
等
V7.00
以上
形状以及输入数据
识别方式以及结果
长度
L
宽度
W
判断标准
1)
长度
: (69, 123, 124, 154) L
±
(25%)
(84, 104, 120) L
±
(20%)
2)
宽度
: (69, 123, 124, 154) W
±
(25%)
(84, 104, 120) W
±
(20%)
3)
对边的平行度
:
±
10[
°
]
4)
邻边的直交度
: 90
±
10[
°
]
5)
角度
: (69, 123, 124, 154)
识别角度
±
60[
°
]
(Top view)
(84, 104, 120)
识别角度
±
30[
°
]
等
在
4
根引线的顶端中心识别
:
検出位置
:
検出中心
可识别姿势(只可识别以下式样
<
也有一部分例外
>
)
式样编号
0 1 2 3
式样
进给方向
式样角度
±
0
°
±
180
°
+
90
°
−
90
°
(备注)
1. 引线部的影子从铸型脱离或铸型为透明时,请使用 No.120。是只检测 4pin 的引线尖端的检测方法。
影子断掉
(透明树脂铸型)
2. 因引线短而从部品底面笔直地露出时,请使用 No.84 (反射识别)
。
(笔直露出)
(
正常
)
短引线=引线长度
(a)
比引线宽度
(b)
短
(Side view)
3.
检测要检测的 4 根引线以外有无不需要的引线(防止误设定其他部品)时,请使用 No.104。
被检测的引线
不需要的引线检查位置
(No.123:
式样角度
0
°)
(No.124:
式样角度
0
°)
4. 若有 1 根引线宽度不同,并对其进行极性检测时,
请使用 No.123, 124。W 值,请输入没有较宽引线
一方的数值。
5. 特意指定利用反射照明/透过照明的识别方法时,请使用 No.84(反射) /No.154(透过)。
HGR14-C-PMA01-A02-01
b
a
W
W