00193328-01.pdf - 第219页
Betriebsanleitung Linienrechner UNIX 6 Produ kt / Gehäuseform Softwareversion 503.xx Ausgabe 02/2002 6.1 Gehäuseform-Ed itor (GF-Editor) 217 I t I I Auswahlfeld für den Zentriervorgang In diesem Auswahlfeld wird die Zent…
6 Produkt / Gehäuseform Betriebsanleitung Linienrechner UNIX
6.1 Gehäuseform-Editor (GF-Editor) Softwareversion 503.xx Ausgabe 02/2002
216
I
t I I
- Feeder Pitch [mm] Hier kann der Abstand in mm zwischen zwei Bauelementen in
der Verpackung (z.B. im Gurt) angegeben werden.
- Vakuumabfrage bei Abholung Bei der Abholung des Bauelement wird mittels Sensoren
abgefragt, ob das Bauelement aufgenommen wurde.
(Prüfung des Vakkuums an der Saugpipette)
- Aut. Abholkorrektur Ist diese Option aktiviert, wird an der Station der ermittelte
Abholoffset automatisch korrigiert, so dass das Bauelement
mittig abgeholt wird.
HINWEIS
Für Bauelemente, die nicht mittig abgeholt werden können, muss die Option "Aut. Abholkorrektur" deakti-
viert werden.
- Frühes Vakuum Ist diese Option aktiviert, wird das Vakuum früher eingeschaltet,
als es standardmäßig festgelegt ist.
- Abholen ohne Kontakt Ist diese Option aktiviert, wird das Bauelement ohne Aufsetzen
der Pipette auf das Bauelement (d.h. kontaktlos) abgeholt.
Verfahrprofil
In diesem Bereich kann das Verfahrprofil der z-Achse beim Runterfahren und Rauffahren während des
Abholvorgangs mit Hilfe der Pfeilbuttons eingestellt werden.
- Runterfahren Hier können folgende Parameter eingestellt werden:
1 Standard
17 Kontaktlos
(Dieser Parameter ist automatisch eingestellt, wenn die
Option "Abholen ohne Kontakt" aktiviert wurde.)
- Rauffahren Hier können folgende Parameter eingestellt werden:
2 Standard
3 Langsam anfahren
4 Schleichend anfahren
HINWEIS
Wurde kein Verfahrprofil eingestellt, ist in dem entsprechenden Editierfeld nur eine gestrichelte Linie
(----) eingetragen.
Betriebsanleitung Linienrechner UNIX 6 Produkt / Gehäuseform
Softwareversion 503.xx Ausgabe 02/2002 6.1 Gehäuseform-Editor (GF-Editor)
217
I
t I I
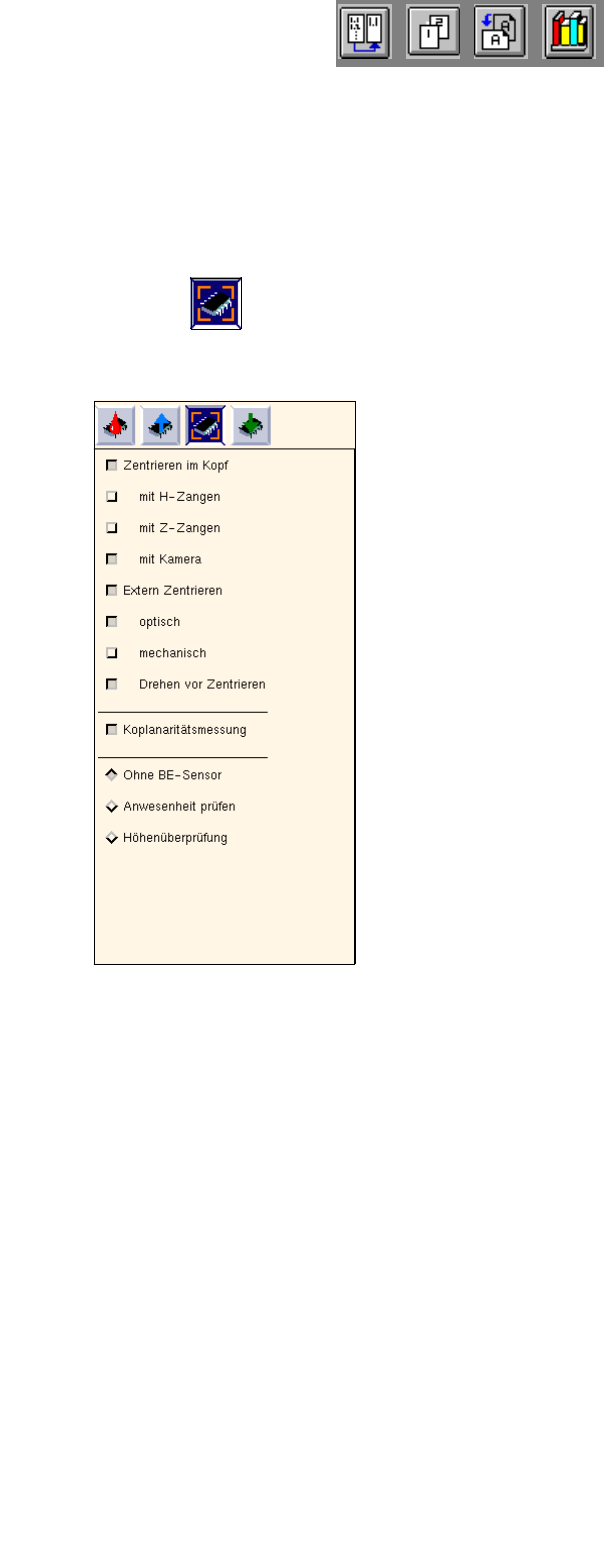
Auswahlfeld für den Zentriervorgang
In diesem Auswahlfeld wird die Zentrierart für den BE-Typ festgelegt. Es stehen dafür die Einstellung "Zentrieren
im Kopf" bzw. "Extern Zentrieren" mit den jeweiligen Optionen für den Zentrierablauf zur Verfügung, außerdem
kann die Koplanaritätsmessung aktiviert/deaktiviert werden. Im unteren Bereich des Auswahlfeldes wird die
Option für die Prüfung mittels BE-Sensor eingestellt.
● Die Ikone anklicken.
Das Auswahlfeld zur Festlegung des Handlings beim Zentriervorgang wird angezeigt.
- Zentrieren im Kopf Das BE wird mit dem Revolverkopf oder dem Bestückkopf an
der HS-180 zentriert, wenn zusätzlich eine der drei nachfolgenden
Optionen gewählt wird.
mit H-Zangen Mech. Zentrierung mittels h-Zangen (Messzangen) des
Bestückkopfes der HS-180
mit Z-Zangen Mech. Zentrierung mittels z-Zangen des Bestückkopfes
der HS-180
mit Kamera Optische Zentrierung mit der BE-Kamera des Revolverkopfes

6 Produkt / Gehäuseform Betriebsanleitung Linienrechner UNIX
6.1 Gehäuseform-Editor (GF-Editor) Softwareversion 503.xx Ausgabe 02/2002
218
I
t I I
- Extern Zentrieren Das BE wird extern mit Hilfe der entspr. Zentriereinrichtungen
einer HS-180 oder mittels IC- bzw. FC-Kamera einer SIPLACE
80F3/F4 zentriert.
optisch Das BE wird mittels optischer Zentrierstation einer HS-180 oder
mittels IC- bzw. FC-Kamera einer SIPLACE 80F3/F4 zentriert.
mechanisch Das BE wird in der mechanischen Zentrierstation zentriert.
(Funktion wird derzeit nicht verwendet)
Drehen vor Zentrieren Vor dem Messen (Zentrieren) des BE’s mit Hilfe der optischen
Zentrierstation einer HS-180 oder der IC- bzw. FC-Kamera einer
SIPLACE 80F3/F4 wird es in die Bestücklage gedreht
(um 90°, 180° oder 270°)
- Koplanaritätsmessung Durch die Koplanaritätsmessung mit dem Lasermodul wird
ermittelt, ob das BE in vertikaler Richtung verbogene Beinchen
aufweist und ggf. als fehlerhaft ausgesondert werden muss.
Ohne BE-Sensor Ist diese Option aktiviert, wird keine Überprüfung mittels
BE-Sensor beim Bestücken durchgeführt.
Anwesenheit prüfen Ist diese Option aktiviert, wird das Vorhandensein des
Bauelements beim Bestücken mittels BE-Sensor überprüft.
Höhenüberprüfung Ist diese Option aktiviert, wird eine Überprüfung der BE-Höhe
mittels BE-Sensor durchgeführt. Dabei wird automatisch auch das
Vorhandensein des Bauelements überprüft.