00191297-02.pdf - 第43页
User Manual S-23 HM 1 Introduction Software Version SR.405.xx 05/99 Issue 1.13 Overview of the modules - revolver head 41 1.13 O vervi ew of the mod ules - re volver head 1.13 .1 Structure of t he 12-se gment re volver h…
1 Introduction User Manual S-23 HM
1.12 Overview of the modules - gantries Software Version SR.405.xx 05/99 Issue
40
1.12.3 Technical data for the x axis
1.12.4 Structure of the y axis
The y axis essentially consists of the following main modules: 1
– y axis three-phase AC servomotor
– y axis toothed belt
– y axis guide system
– y axis measuring system
1
Each y axis is driven by a three-phase AC servomotor. An anti-crash circuit prevents the traversing
paths of the gantries meeting. 1
1.12.5 Technical data for the y axis
Drive Three-phase AC servomotor/toothed belt
Maximum speed 2.5 m/sec.
Traversing path 620 mm
Distance measuring system Metal linear scale
Scale length 646 mm
Resolution 2.5 µm
Drive Three-phase AC servomotor/toothed belt
Maximum speed 2.5 m/sec.
Traversing path of the gantries 910 mm
Distance measuring system Metal linear scale
Scale length 970 mm
Resolution 2.5 µm
User Manual S-23 HM 1 Introduction
Software Version SR.405.xx 05/99 Issue 1.13 Overview of the modules - revolver head
41
1.13 Overview of the modules - revolver head
1.13.1 Structure of the 12-segment revolver head
1
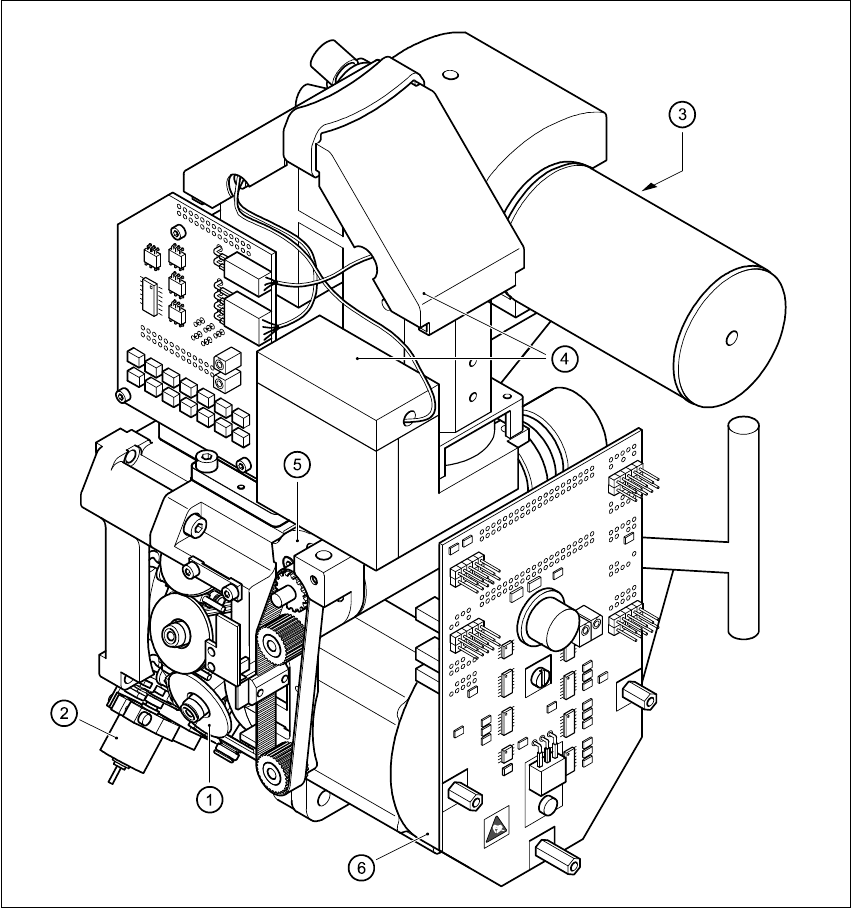
Fig. 1.13 - 1 Structure of the 12-segment revolver head
(1) Star with 12 sleeves (2) Motor for "Reject" valve adjustment drive
(3) Turning station (4) Component vision system
(5) Z axis drive (6) Star motor
1 Introduction User Manual S-23 HM
1.13 Overview of the modules - revolver head Software Version SR.405.xx 05/99 Issue
42
All the components are inserted with the same cycle time. Before the component is inserted, it is
measured by the optoelectronic vision system. 1
– The component vision camera creates an image of the current component.
– The precise position of the component is also determined.
– The package form of the current component is compared against the programmed package
form in order to identify it. Any components that cannot be identified are rejected.
– The turning station turns the component to the required placement position.
1.13.2 Description of the 12-segment revolver head
– The 12-segment revolver head works using the "collect & place" principle, i.e. the components
are held by the nozzles with the aid of a vacuum and, after one complete pick-up cycle, are
placed gently and accurately on the PCB with the aid of forced air. The vacuum in the nozzles
is also checked several times to determine whether the components were picked up and set
down correctly.
– The "adaptive" sensor stop mode of the z axis compensates for any irregularity of the PCB sur-
face when the components are set down.
– Defective components are rejected and are picked up again during a repair run.
1.13.3 Technical data - revolver placement head
Range of components
0402 to PLCC44, including BGA, µBGA, flip-chip,
TSOP, QFP, PLCC, SO to SO32, DRAM
Maximum height 6 mm
Minimum lead pitch 0.5 mm
Minimum dimensions 0.5 mm x 1.0 mm
Maximum dimensions 18.7 mm x 18.7 mm
Maximum weight 2 g
Maximum travel of the z axis 16 mm
Programmable set-down force 2.4 to 5.0 N
Nozzle types 9xx
Angular accuracy 0.7° at 4 sigma
Placement accuracy ± 90 µm at 4 sigma
± 67.5 µm at 3 sigma