TR7007_V1.4.pdf - 第99页
Test Research Inc. TR 7007 User Guide -- So ftware 99 儲存:儲存當前設定的資料夾路徑。 顯示結果:反灰欄位顯示條碼與條碼規則判定的結果。 5.1.3 存檔 功能說明與 4..5 相同。 5.1.4 系統設定 系統設定介面在動態取相機型與走停取相機型有些微的不同,下面將會分別說明兩種 不同機型。 5.1.4.1 系統設定 - 動態取相機型 系統設定介面示意 圖 圖 199 解析度:…
Test Research Inc.
98 TR7007 User Guide--Software
使用對應檔案讀取 xml 檔案介面示意圖 圖197
目前條碼:使用手持硬體條碼讀取條碼後(會自動帶入 Enter 鍵),欄位顯示條
碼讀取的結果。
條碼規則:假設輸入規則為???????XXX*,其中:?為可忽略字元,X 代表必
須符合的字元,而*代表*以後的字元不進行確認。
插入:執行設定的條碼規則。在指定的檔案路徑下搜尋符合規則的檔案名。
並於下方欄位查看當前條碼規則搜尋到的 xml 檔案。
檔案路徑:設定搜尋存放 xml 檔的路徑。
顯示結果:反灰欄位顯示條碼與條碼規則判定的結果。
儲存 / 開啟:儲存 / 開啟當前設定的規則與路徑。
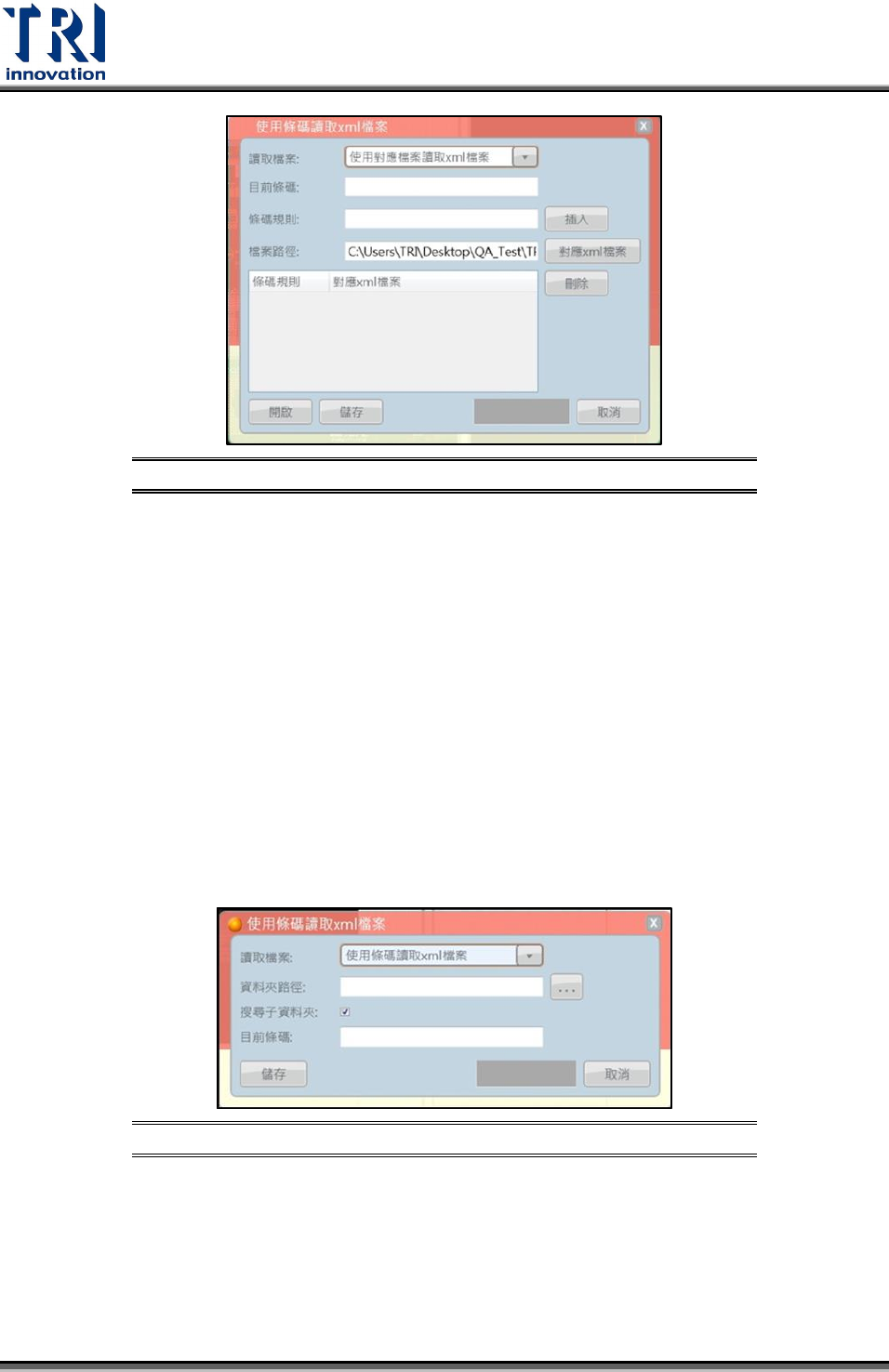
使用條碼讀取 xml 檔案:條碼與 xml 檔案名 100%符合。
使用條碼讀取 xml 檔案介面示意圖 圖198
資料夾路徑:設定 xml 存放的資料夾路徑
搜尋子資料夾:選擇是否搜尋該資料夾路徑下的所有子資料夾。
目前條碼:使用手持硬體條碼機讀取條碼後(會自動帶入 Enter 鍵),欄位顯示
條碼讀取到的結果。
Test Research Inc.
TR7007 User Guide--Software 99
儲存:儲存當前設定的資料夾路徑。
顯示結果:反灰欄位顯示條碼與條碼規則判定的結果。
5.1.3 存檔
功能說明與 4..5 相同。
5.1.4 系統設定
系統設定介面在動態取相機型與走停取相機型有些微的不同,下面將會分別說明兩種
不同機型。
5.1.4.1 系統設定-動態取相機型
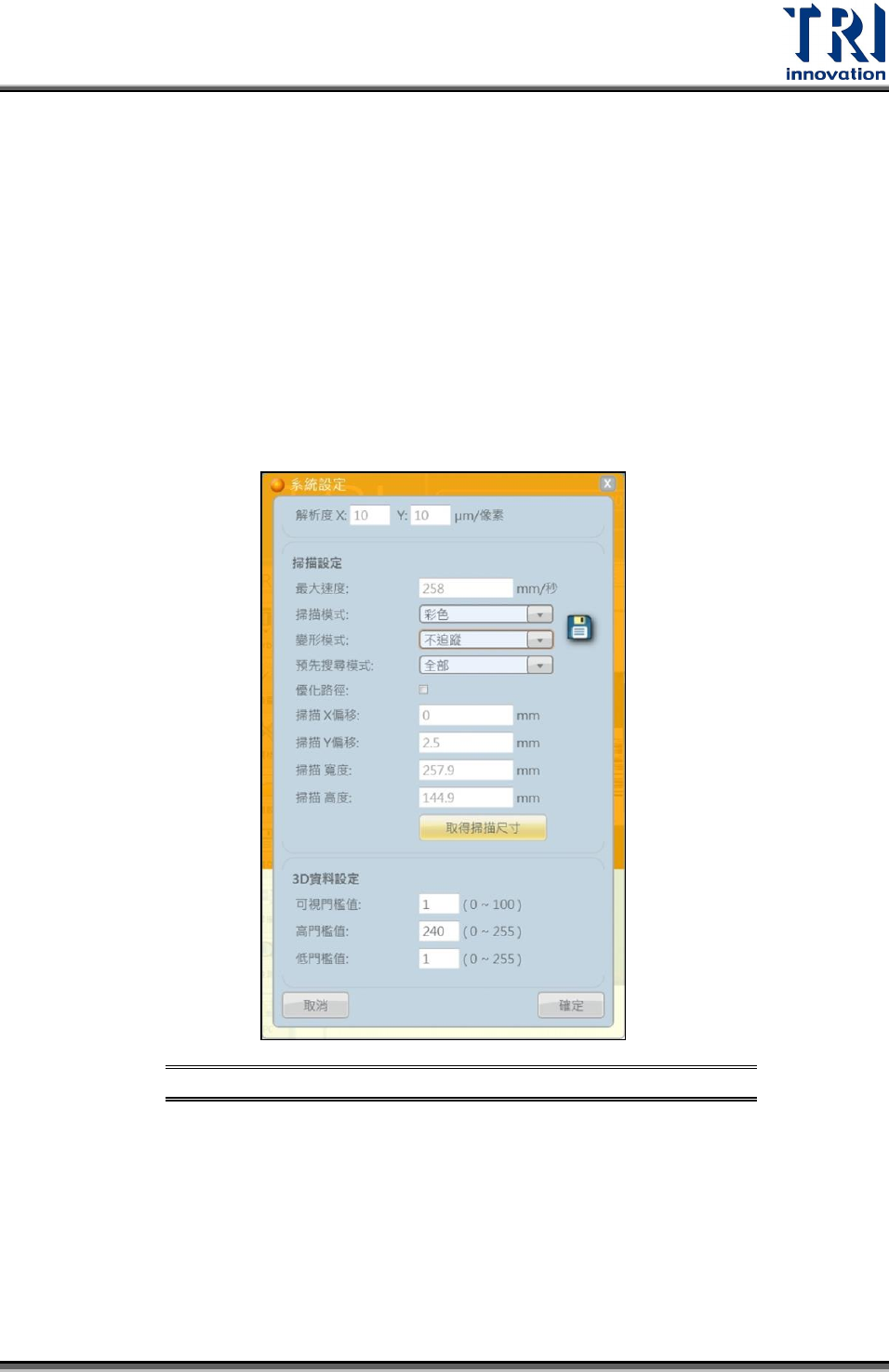
系統設定介面示意圖
圖199
解析度:顯示當前機台搭配的光學解析度。
最大速度:顯示速度/正常/彩色模式的最快掃描速度。因正常模式需蒐集的影像數量
較速度模式多,因此在一定的曝光時間下,一般模式的掃描速度較速度模式慢。(此
設定值為系統內訂,使用者不可修改。)
掃描模式:分為三種:正常/速度/彩色。
Test Research Inc.
100 TR7007 User Guide--Software
正常模式:使用正常速度掃板,利用降低掃圖時間取得更多受測物資訊以增加
準確度,適用於高精度無時間壓力型生產線。此模式下左右條紋光分別蒐集 8
張不同投射週期的影像經由四步相移法計算出該搜尋區域的高度值,共使用
16 張影像來計算出該區域的高度值。
速度模式:使用最高速度掃板,適用於大量輸出型產品。此模式下左右條紋光
分別蒐集 4 張不同投射週期的影像,經由四步相移法計算出該搜尋區域的高度
值,共使用 8 張影像來計算出該區域的高度值。
彩色模式:除了使用左右條紋光影像計算該點高度值外,利用大環燈(R/G/B)
與小環燈(W)來呈現彩色圖像,共需使用 12 張影像(8 張條紋光圖像 + 4 張彩色
圖像)
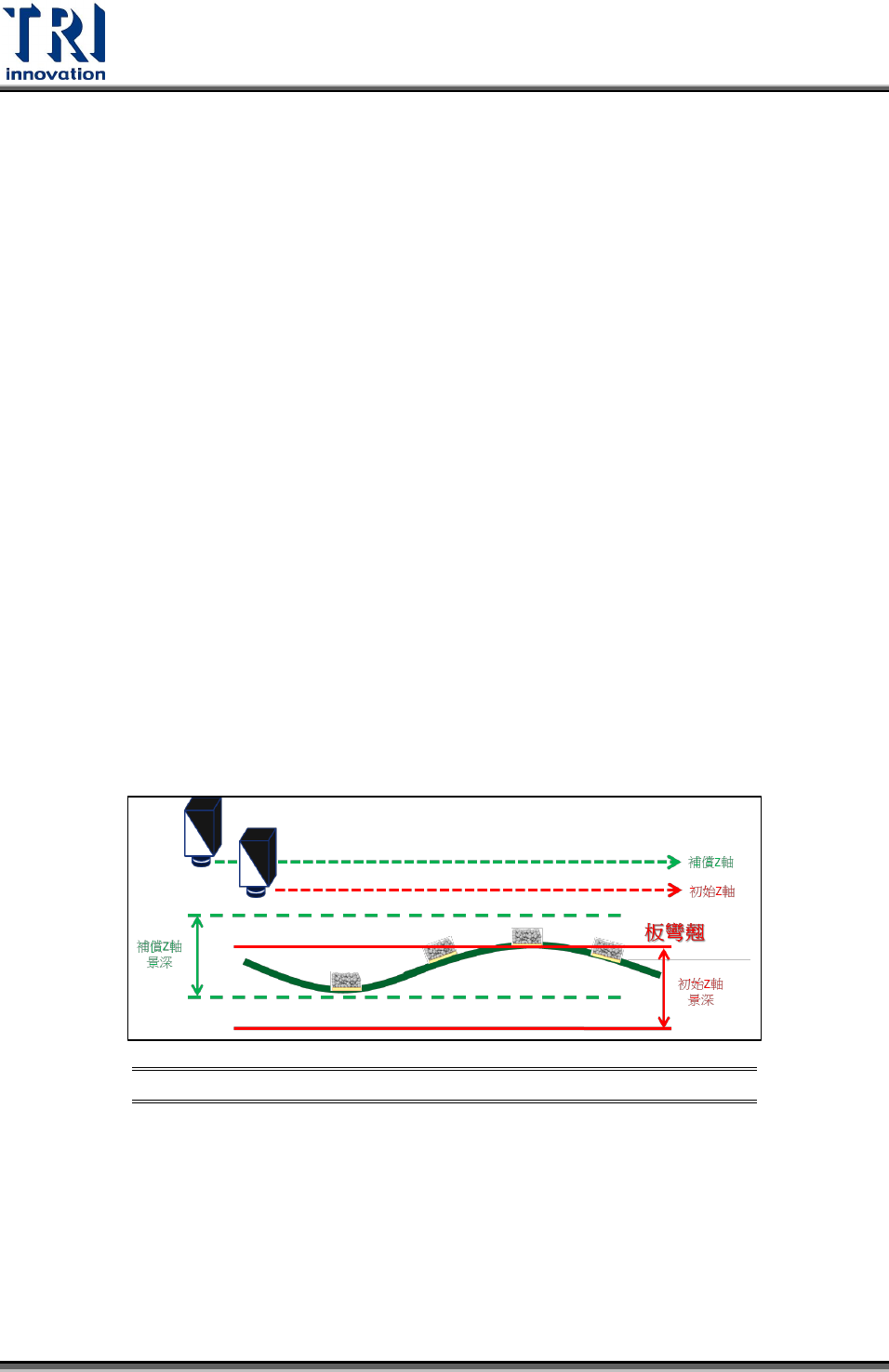
變形模式:分為追蹤與不追蹤。選擇”追蹤”功能後,於檢測時啟用測距雷射,其結果
可於快捷工具列上點選『變形視圖』顯示全板的變形情況。用途在於若受測板有板彎
(翹)發生,部分受測物存在失焦的風險,進而影響後續計算的準確性。因此每次動態
掃描時若有部分受測物超出此焦距景深時,軟體根據雷射量測値評估適當的高度値(Z)
後進行 Z 軸補償。
以下說明兩種失焦狀況:
單一取像時,使用單一高度補償値即可克服部份受測物失焦的情形:軟體根據
雷射量測的高度値找出適當的補償值以確保所有受測物皆在相同焦距景深內。
完成補償後鏡頭會移動至補償的高度進而開始掃描。由於本系統為動態取像,
因此在單一次取像過程中不可改變鏡頭與受測物之間的距離。
全體受測物皆適用相同 Z 值示意圖
圖200
單一取像時,使用多個高度補償値才可克服部份受測物失焦的情形:當板子發
生嚴重的彎(翹)情形,受測物間的高度落差太大,即便軟體根據雷射量測的高
度値找出補償值後仍有部分受測物失焦。此時,機台會先調整一個高度補償値
使多數受測物於此焦距景深內;完成掃描後,機台會再次改變 Z 値後重覆掃描。
最多可重覆掃描 3 次。