YG300_Ope_K.pdf - 第104页
3-18 3 • 마 크 모 니 터 모 드 마 크 인식 시의 모니 터상 에 표 시모 드를 설정합 니 다 . 설 정된 항 목 에 의해 화 면상 에 인식결 과 의 숫자 와 2 원화 한 화 상 이 표 시됩니 다 . 이 모 니터 모 드는 , 운 전중 에도 변 경가 능 합 니다 . 「 없슴」 카 메라로 촬 영한 화 상 이 표 시됩…
3-17
3
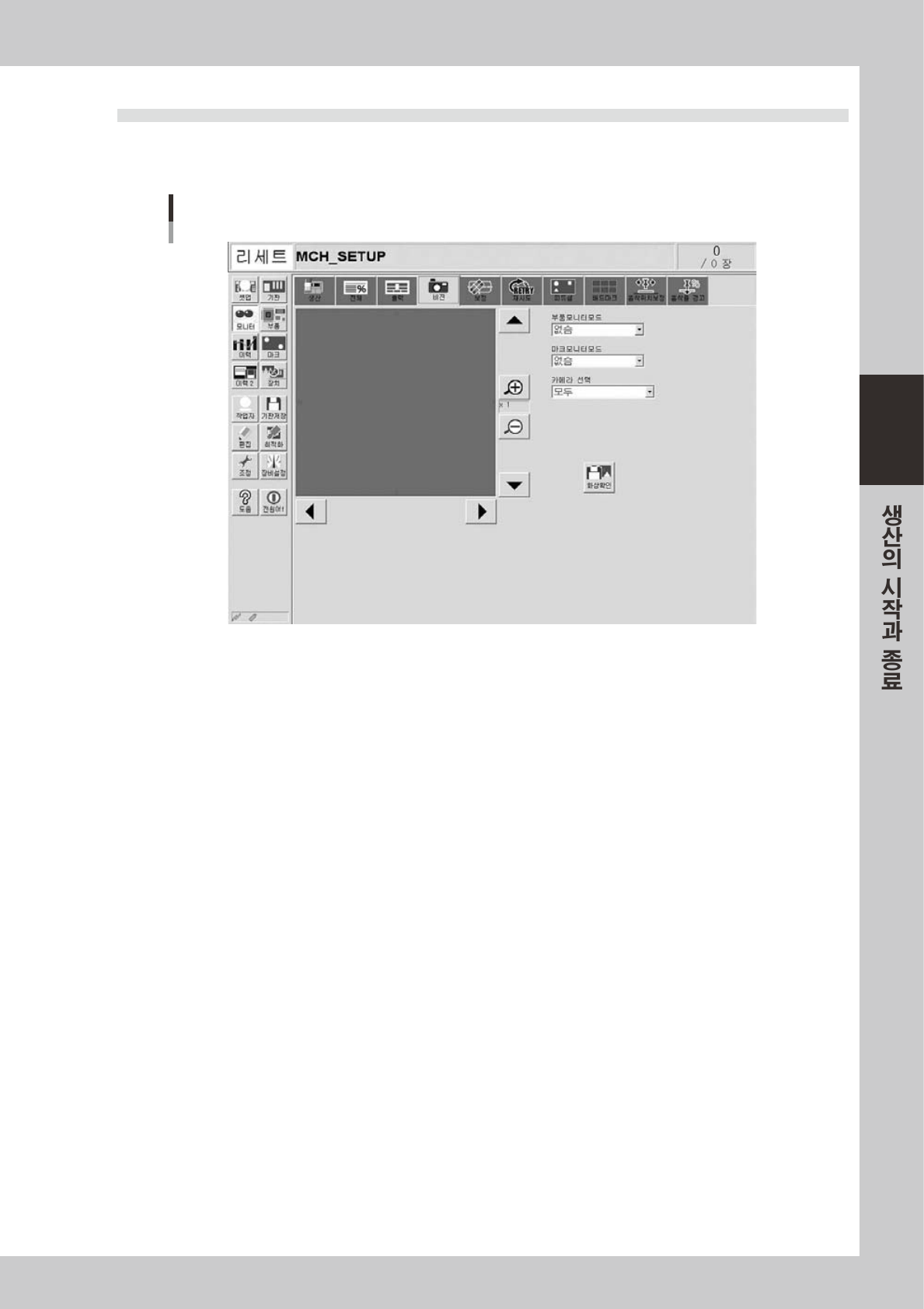
4.4 비젼
자동운전으로 기판마크와 배드마크 , 부품 등을 인식했을 때 인식화상을 표시합니다 . 멀티카메라에 의한 부
품인식의 경우 , 고속 , 연속으로 부품인식을 하기 때문에 최후에 인식되는 부품만 표시합니다 .
모니터 : 비젼
28312-M3- 00
•
확대 , 축소버튼
확대 (+) 버튼을누르면인식결과화상을1 부터16 배까지확대할수있습니다 .또한 ,축소 (-) 버튼을누르면
1/16 까지축소할수있습니다 .단 ,확대했을경우 ,매끄러웠던부품의엣지부분이꺼칠꺼칠한계단형이되거나 ,
축소했을경우 ,주위에회색부분이보이거나하지만 ,이것은잘못된것이아닙니다 .
•
화상 상하좌우 이동버튼
화면의우측상하에있는화살표버튼은화상의상하이동버튼입니다 .그리고 ,화면의하측좌우에있는화살표
버튼은화상의좌우이동버튼입니다 .화면상에표시되지않는화상의주위를보고싶은경우에사용합니다 .
•
부품모니터모드
부품인식시의모니터상의표시모드를설정합니다 .설정된항목에의해화면상에인식결과의숫자와검출범위의
선이표시됩니다 .이모니터모드는 ,운전중에도변경가능합니다 .
「없슴」
카메라에서촬영한화상이표시됩니다 .인식결과의숫자는표시되지않습니다 .
「인식결과」
인식결과의X,Y,R 방향의위치 ( 화소 ) 와검출리드수의정보가표시됩니다 .
단 ,부품의인식타입에의해표시되는항목이다르므로주의하여주십시오 .
「검출범위」
부품의검출범위가선으로나타납니다 .만약 ,부품이검출범위에서벗어나있을경우에는 ,정확한부품인식을
할수없으므로 ,흡착상태의인식또는부품데이터를수정하여주십시오 .
「기준위치」
리드와부품의단면검출의기준이되는위치가크로스커서로표시됩니다 .
「검출라인」
칩계열부품의경우는부품위에 ,리드부착부품에서는리드위에 ,부품검출에이용한선이표시됩니다 .
검출라인의위치가이상한경우는 ,부품인식파라미터를조정하여주십시오 .
「엣지위치」
리드와부품의엣지위치에크로스커서가표시됩니다 .
「최종위치」
부품의중심위치에크로스커서가표시됩니다 .

3-18
3
•
마크모니터모드
마크인식시의모니터상에표시모드를설정합니다 .설정된항목에의해화면상에인식결과의숫자와2 원화한
화상이표시됩니다 .이모니터모드는 ,운전중에도변경가능합니다 .
「없슴」
카메라로촬영한화상이표시됩니다 .인식결과의숫자는표시되지않습니다 .
「인식결과」
검출한마크의중심위치좌표 ( 화소 )등이표시됩니다 .
「2 진화상」
카메라로촬영한화상을2 원화한결과화상이표시됩니다 .인식결과등의숫자는표시되지않습니다 .
「다중화상」
카메라로촬영한화상을화상처리한후의다원화화상이표시됩니다 .
「추적결과 ]
인식해서얻은마크와배경과의경계를나타내는선이그려집니다 .
「기준원」
검출된마크의중심으로부터설정데이터직경의마크가그려집니다 .( 특정인식모드만가능 )
「내외접원」
검출된마크의중심으로부터내접하는원과외접하는원이그려집니다 .( 특정인식모드만가능 )
「오차화상」
오차화상이표시됩니다 .( 특정인식모드만가능 )
「개별데이터」
2 개이상의물체가검출되는경우에 ,개별데이터가표시됩니다 .( 특정인식모드만가능 )
•
화상확인
장비의각카메라가사전에인식화상으로부터 ,카메라 ,헤드를지정해서확인할수있습니다 .
3-19
3
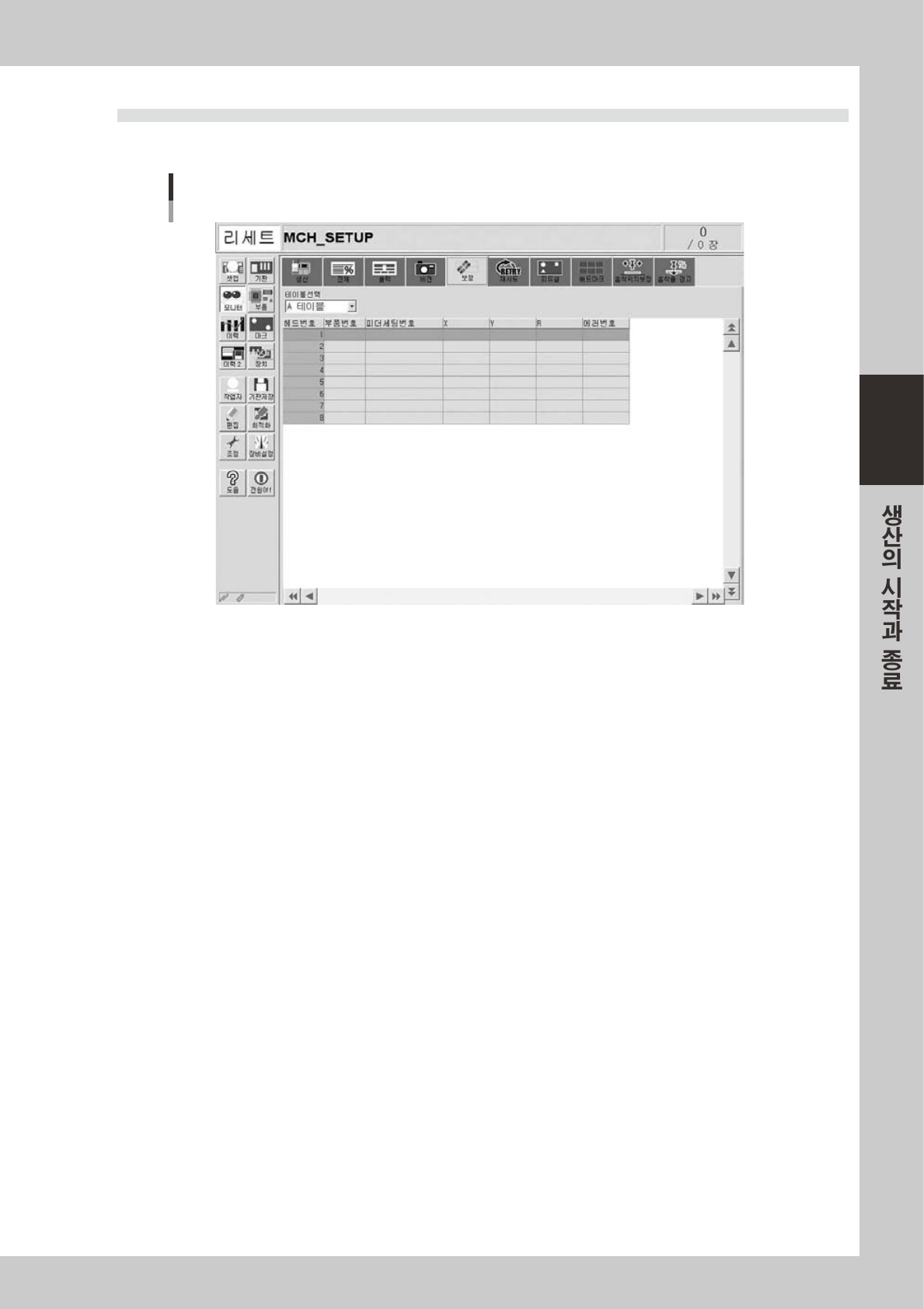
4.5 보정
자동운전중인 부품인식 결과의 보정량 , 에러코 드 등이 일람표 형식으로 표시됩니다 .
모니터 : 보정
28313-M3- 00
•
헤드번호
헤드의수량만큼표시됩니다 .현재의흡착에서시작되는1시퀀스로이용되고있는헤드번호의인식결과가
표시됩니다 .단 ,표시는카메라에의한화상인식종료후입니다 .
•
부품번호
해당헤드가흡착하여 ,인식한부품의번호가표시됩니다 .
•
피더세팅번호
해당헤드가흡착하여 ,인식한피더번호가표시됩니다 .
•
보정량 X, Y, R
해당헤드가인식한부품의보정량을표시합니다 .이수치는노즐의중심으로부터의위치의틀어진양을표시합니다 .
•
에러번호
해당헤드가인식에실패했을때의에러번호가표시됩니다 .