SM451Machine Calibration_PDF00.pdf - 第12页
11-12 Samsung Component Placer SM 451 Administrator ’ s Guide 11.3.1. 轴原点的测定 选择将要设定限度的驱动轴。 可选择的驱动轴如下。 图 11.5 “系统坐标原点 & 限制信息” 对话框 备注 接入本菜单时, 需要通过 “服务工程师” 权限登入。 注 意 作业前 “ READY ” 键必须处于被按 住的状态。 必须检查设备内部 或 Conveyor 上是否存在…
11-11
Machine Calibration
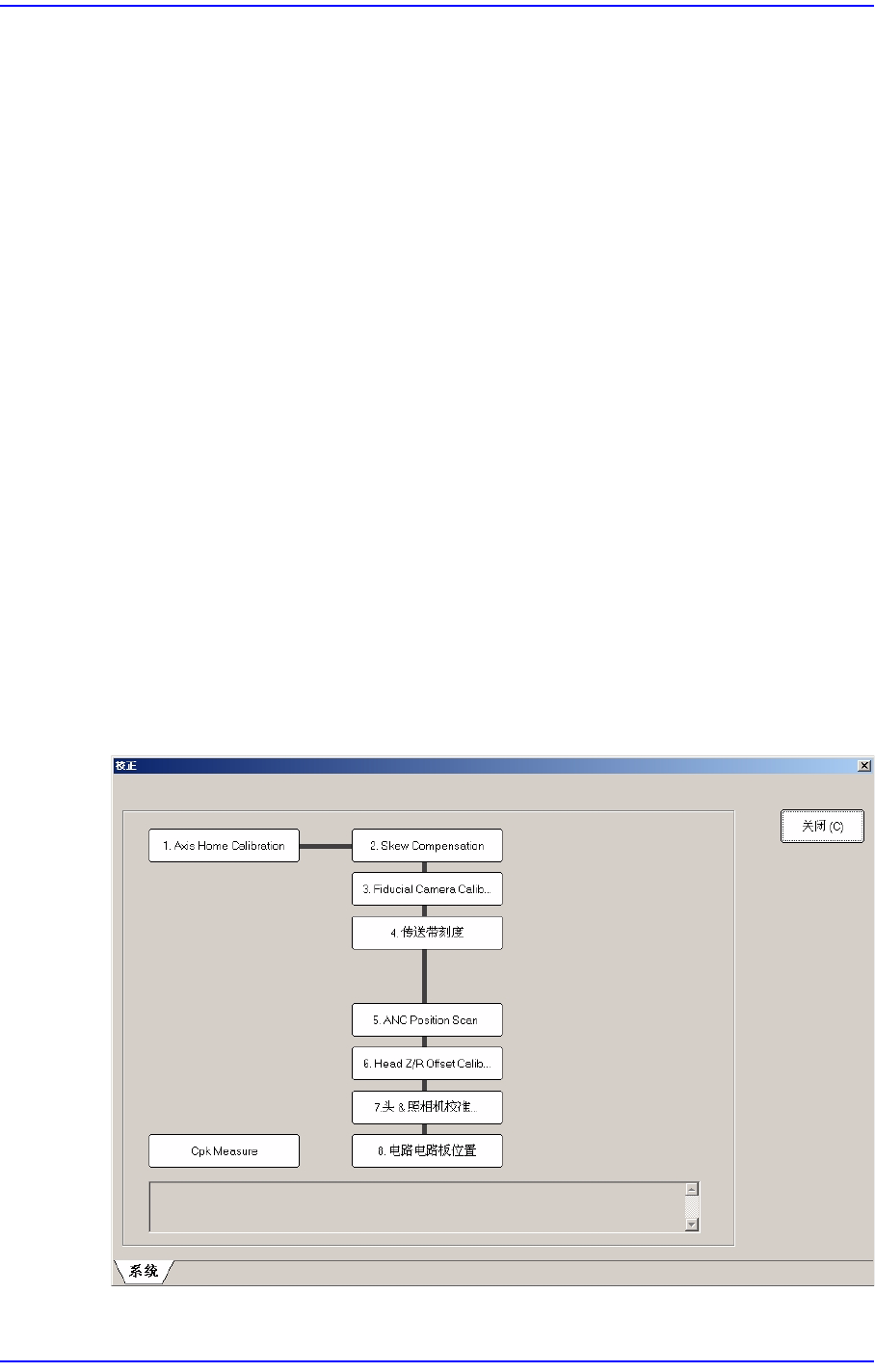
11.3. 校正 [F8]
用于执行与XY Gantry 及 Camera有关的校正
执行校正之前需要确认或先行的作业为如下
I/O Test
检查Mirror上是否有杂质或者是否发生了污染。
Nozzle Check及System Constant的Vacuum Check Option
Nozzle Check及System Constant的Calibration Tool Option:[80]号 “0” (default)
确认ANC Type
确认空压是否异常
执行校正的顺序和相应校正所需的校正 Tool为如下
Axis Home Calibration
Skew Compensation
Fiducial Camera Scale
Conveyor Calibration
ANC Position Scan
Head Z & R Offset calibration - CN040
Head & Camera Calibration - CNT20, LightFly Nozzle, Calibration Glass
Board Position Setup
11-12
Samsung Component Placer SM451 Administrator
’
s Guide
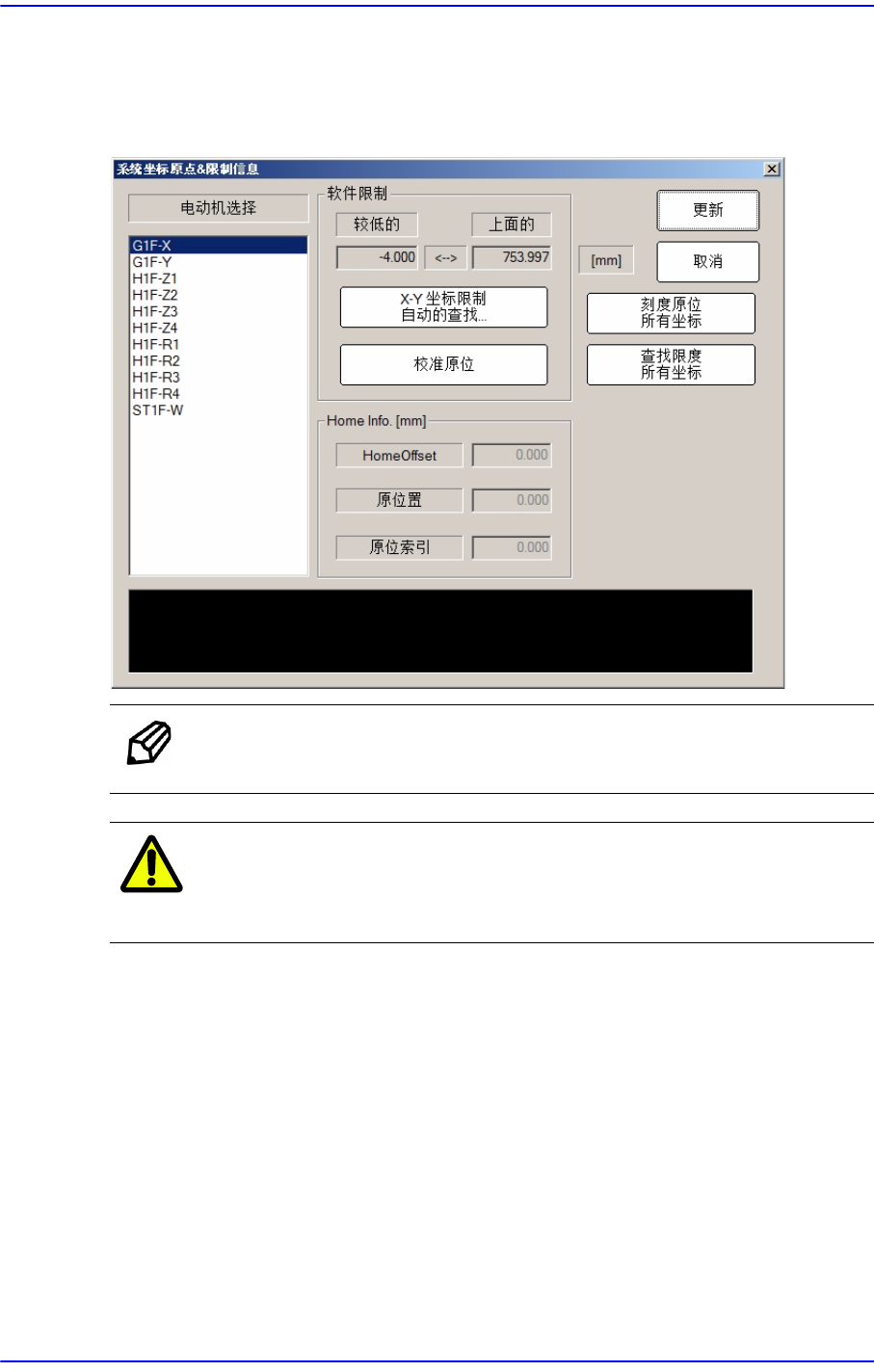
11.3.1. 轴原点的测定
选择将要设定限度的驱动轴。可选择的驱动轴如下。
图
11.5
“系统坐标原点
&
限制信息”
对话框
备注 接入本菜单时,需要通过“服务工程师”权限登入。
注 意
作业前“READY”键必须处于被按住的状态。必须检查设备内部
或Conveyor上是否存在着可能引起干涉的物体。
进行校正作业的方法如下:
1. 单击<刻度原位所有坐标 >键。
2. 单击<查找限度所有坐标 >键。
3. 单击<更新>键。
<电动机选择> 目录框
选择将要设定限度的驱动轴。可选择的驱动轴如下。
G1F-X: 前面 Gantry的 X轴
G1F-Y: 前面 Gantry的 Y轴
H1F-Z1: 前面 Gantry的 Head 1的 Z轴
11-13
Machine Calibration
H1F-Z2: 前面 Gantry的 Head 2的 Z轴
H1F-Z3: 前面 Gantry的 Head 3的 Z轴
H1F-Z4:前面 Gantry的 Head 4的 Z轴
H1F-R1: 前面 Gantry的 Head 1的 R轴
H1F-R2: 前面 Gantry的 Head 2的 R轴
H1F-R3: 前面 Gantry的 Head 3的 R轴
H1F-R4: 前面 Gantry的 Head 4的 R轴
ST1F-W: 前面作业Conveyer的宽度调节马达
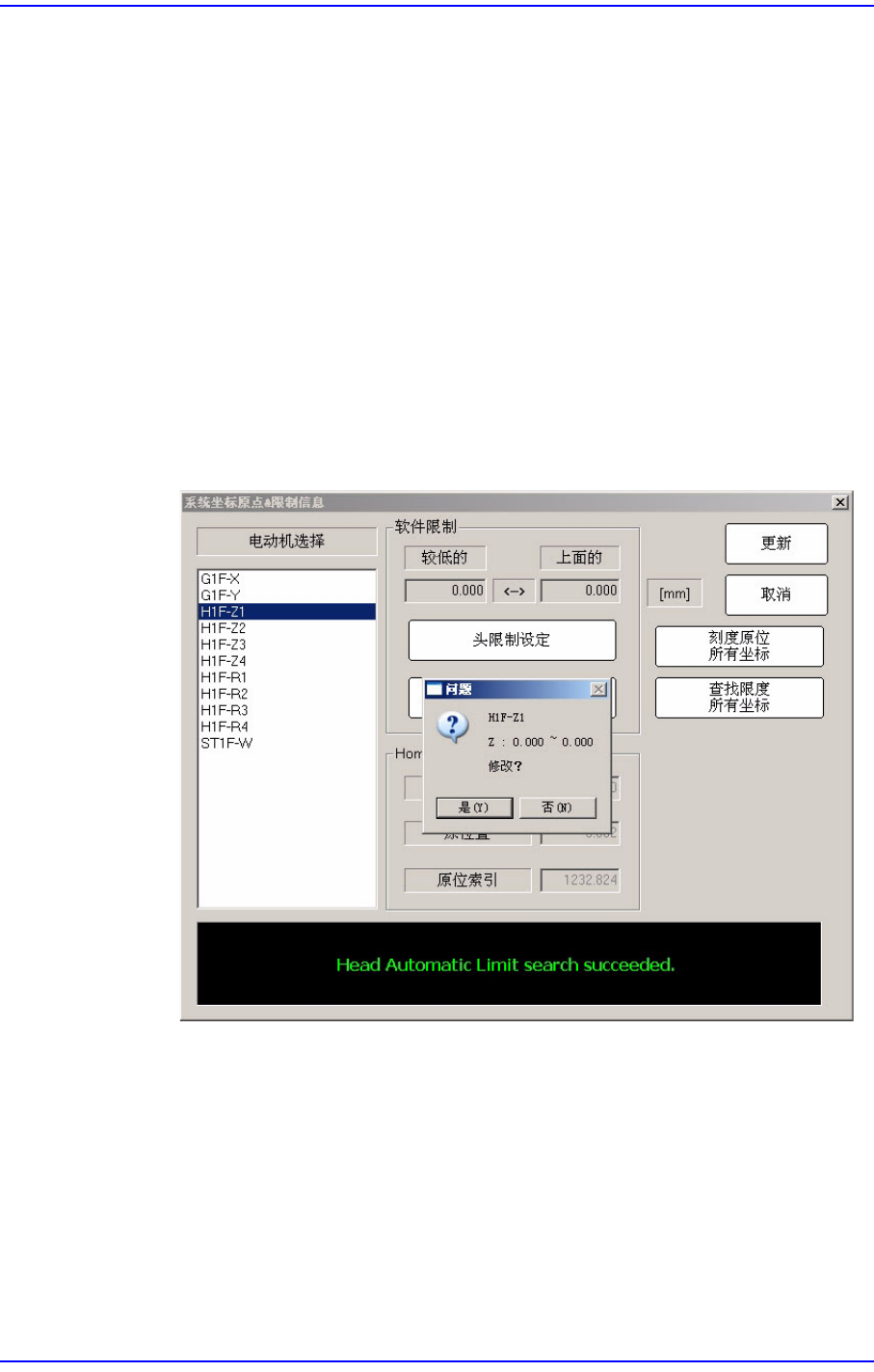
<软件限制> 领域
<头限制设定> 按钮
<电动机选择>目录框自动搜索所选HEAD马达的极限值并反应其值。
<X-Y 坐标限制自动的查找...> 按钮
自动查找XY轴的limit后,确认是否运用变更值。