QP132三级参考手册.pdf.pdf - 第40页
Chapter 2 Out Manipulator

Notes:
Chapter 1 1.4 Training Evaluation
Edition 1.0 1-12 QP-132 Level 3 Tutorial
Chapter 2
Out Manipulator
2.1 Replacing PO-Axis Motor
• Resolution : 0.025 mm/pulse
• Pulse per rotation : 800 pulse
• MY_reduce (deceleration distance) : 400 pulse
Zero set sensor position: 20 mm (800 pulse) from minus side
mechanical stopper.
Zero set complete position: 10 mm (400 pulse) from minus side
mechanical stopper.
1. Replace the motor and ensure that the coupling is tightened and
centered.
2. Hold down the axis change key [3] and [Reset] key then press [Power
On] to boot the machine in mechanical check mode.
3. Press the EMERGENCY STOP button to shutdown the 200V.
4. Push the PO-robot against the minus side mechanical stopper and check
the zero set sensor and dog.
5. Move the zero set dog to the right end of the oval-shaped hole so the
zero set sensor turns ON away from the mechanical stopper.
6. Move the PO-robot to the center of the stroke.
7. Press [INCH] → [Next data] or [Prev data] to select the MX-axis.
8. Press [SERVO ON] → [Start] to Servo ON and zero set.
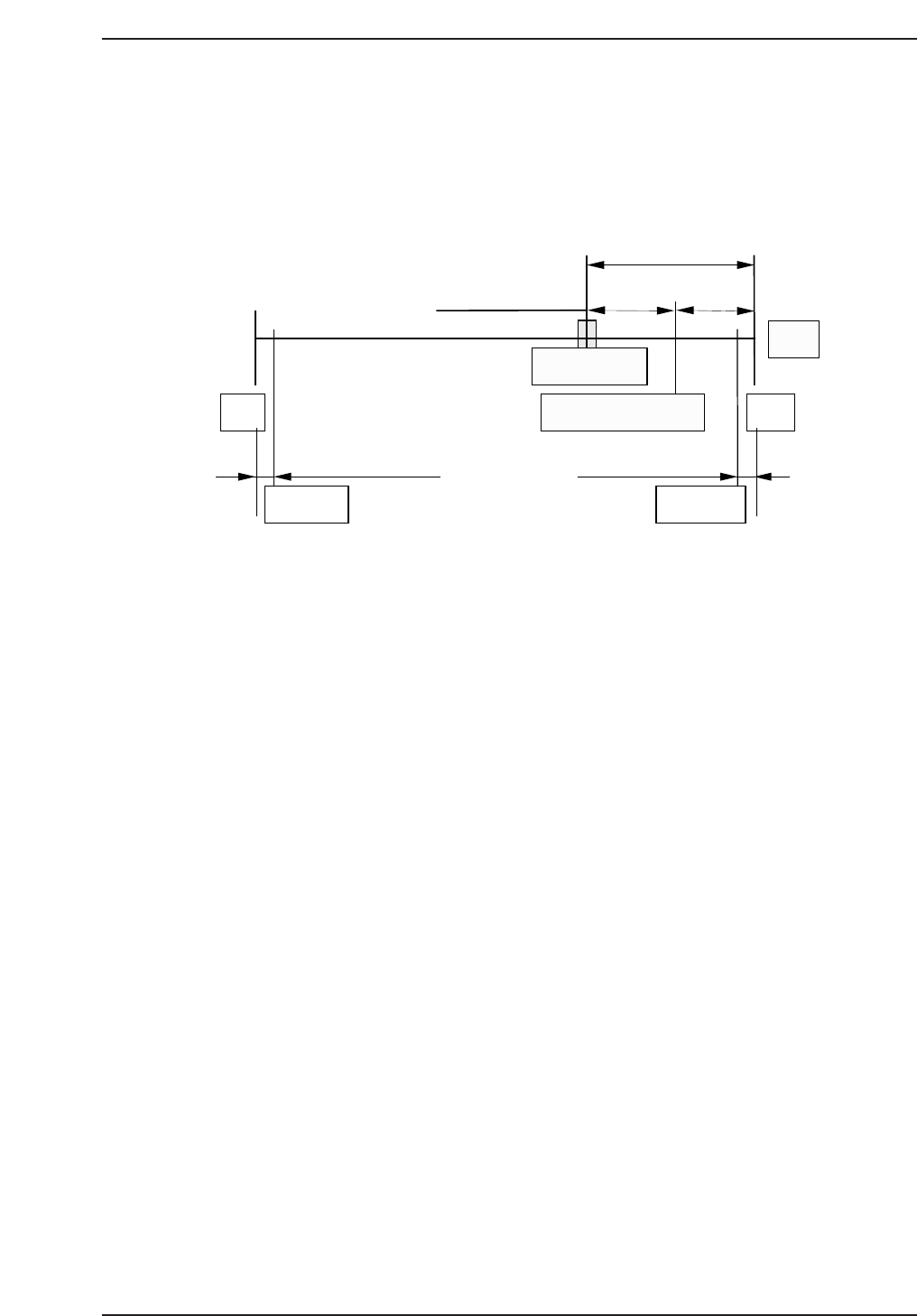
-MS
3.5 mm (140 pulses)
Soft limit Soft limit
3.5 mm (140 pulses)
QP132T2001
10 mm (400 pulses)10 mm (400 pulses)
20 mm (800 pulses)
Zero set complete pos.
Zero set sensor
Motor
+MS
Chapter 2 2.1 Replacing PO-Axis Motor
Edition 1.1 2-1 QP-132 Level 3 Tutorial