3OM-1053-002.pdf - 第45页
1 1 1 1 1 点認識 点認識 点認識 点認識 点認識 X 成分、Y 成分の補正のみ行いθ成分の伸び等は補正されません。 Fig.3B43 2 2 2 2 2 点認識 点認識 点認識 点認識 点認識 基板認識マークは、基板の対角に距離を大きく取って指定してくだ さい。 Fig.3B44 基板認識マークは、以下のような縦または横に並ぶような位 置を避けてください。 Fig.3B45 3 3 3 3 3 点認識 点認識 点認識 点認識 …
((
((
(
A02A02
A02A02
A02
))
))
)
基基
基基
基
板板
板板
板
認認
認認
認
識識
識識
識
デデ
デデ
デ
ーー
ーー
ー
タタ
タタ
タ
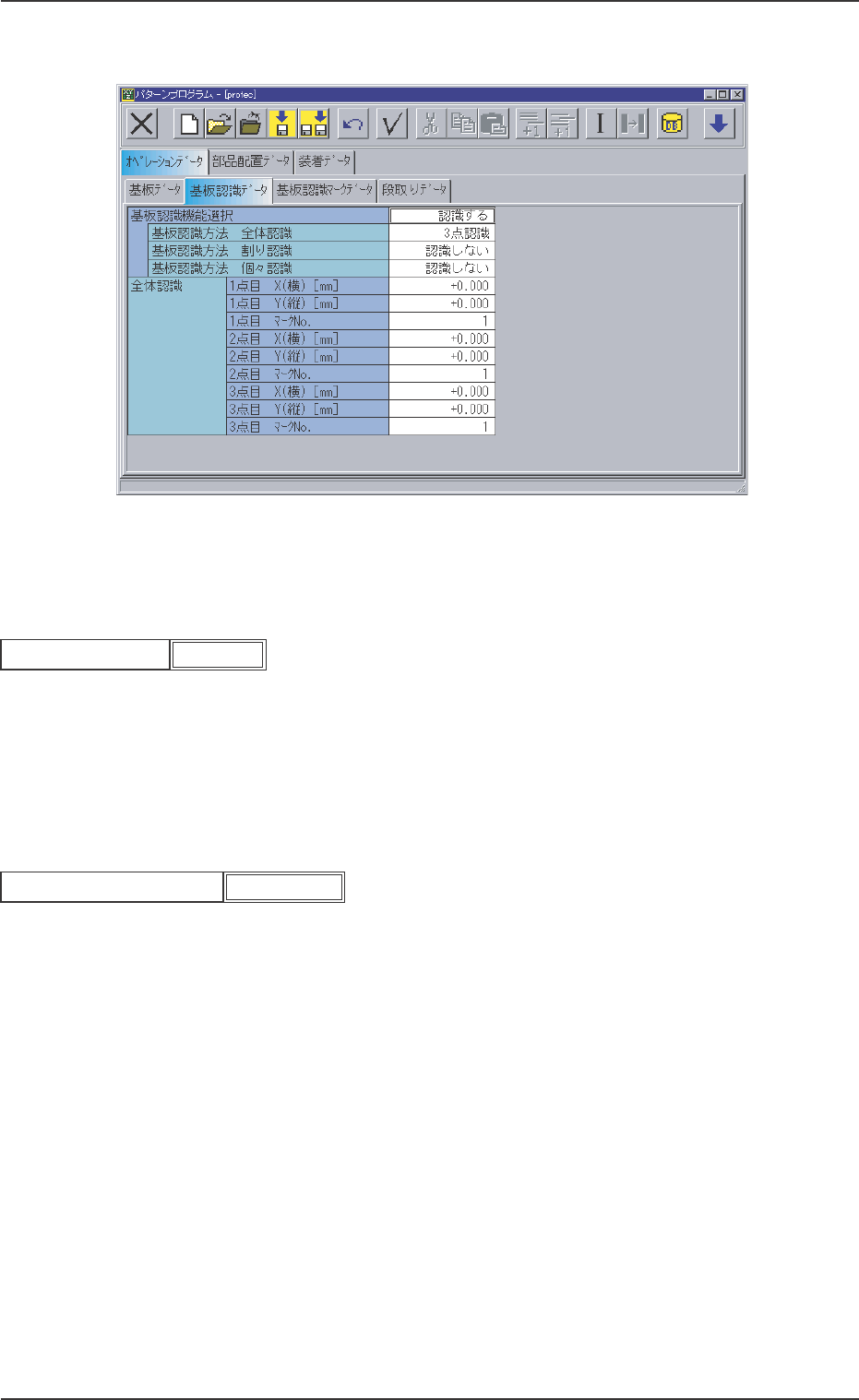
Fig.3B40 編集画面例
((
((
(
A02_01A02_01
A02_01A02_01
A02_01
))
))
)
基板認識機能選択基板認識機能選択
基板認識機能選択基板認識機能選択
基板認識機能選択
基板認識機能を設定します。
認識しない: 基板認識機能を使用しません。
認識する : 基板認識機能を使用します。
基板認識方法 全体認識基板認識方法 全体認識
基板認識方法 全体認識基板認識方法 全体認識
基板認識方法 全体認識
“基板認識機能選択”を“認識する”に設定した場合、全体認識の設
定を以下から選択します。
認識しない: 基板全体認識を行いません。
1 点認識 : 基板全体認識を 1 点で行います。
2 点認識 : 基板全体認識を 2 点で行います。
3 点認識 : 基板全体認識を 3 点で行います。
0206-004 2-25 AGH01JDTP
2.3 オペレーションデータ
認識する
基板認識機能選択
Fig.3B41
基板認識方法 全体認識
Fig.3B42
2点認識
11
11
1
点認識点認識
点認識点認識
点認識
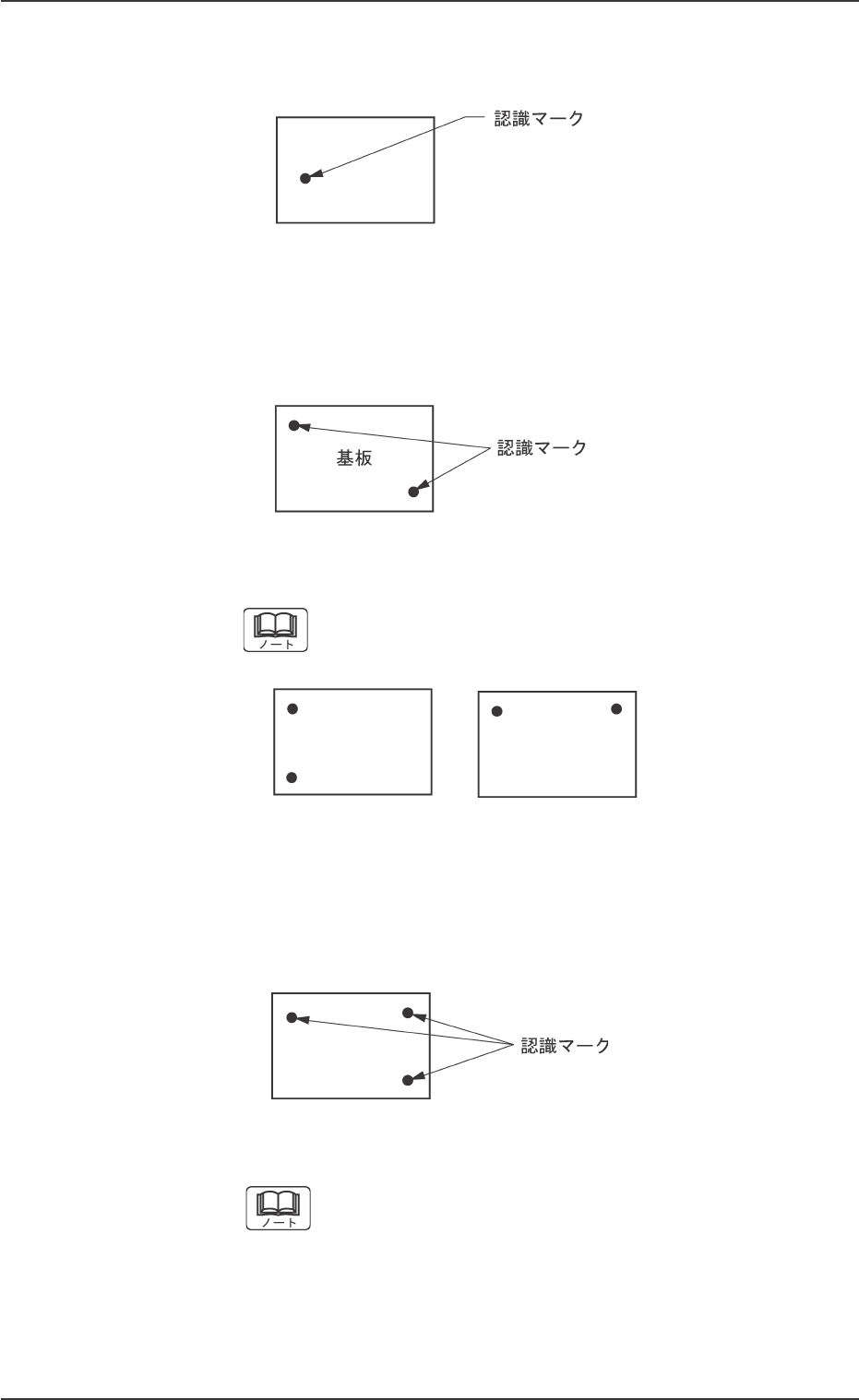
X 成分、Y 成分の補正のみ行いθ成分の伸び等は補正されません。
Fig.3B43
22
22
2
点認識点認識
点認識点認識
点認識
基板認識マークは、基板の対角に距離を大きく取って指定してくだ
さい。
Fig.3B44
基板認識マークは、以下のような縦または横に並ぶような位
置を避けてください。
Fig.3B45
33
33
3
点認識点認識
点認識点認識
点認識
基板認識マークの 3 点を結んでできる三角形の面積ができるかぎり
大きくなるように基板認識マーク位置を指定してください。
Fig.3B46
基板認識マークの3 点のうちの 2点が非常に近い位置に指定
されている場合、2 点認識と同様の補正結果になります。
0111-003 2-26 AGH01JDTP
2.3 オペレーションデータ
基板認識方法 割り認識基板認識方法 割り認識
基板認識方法 割り認識基板認識方法 割り認識
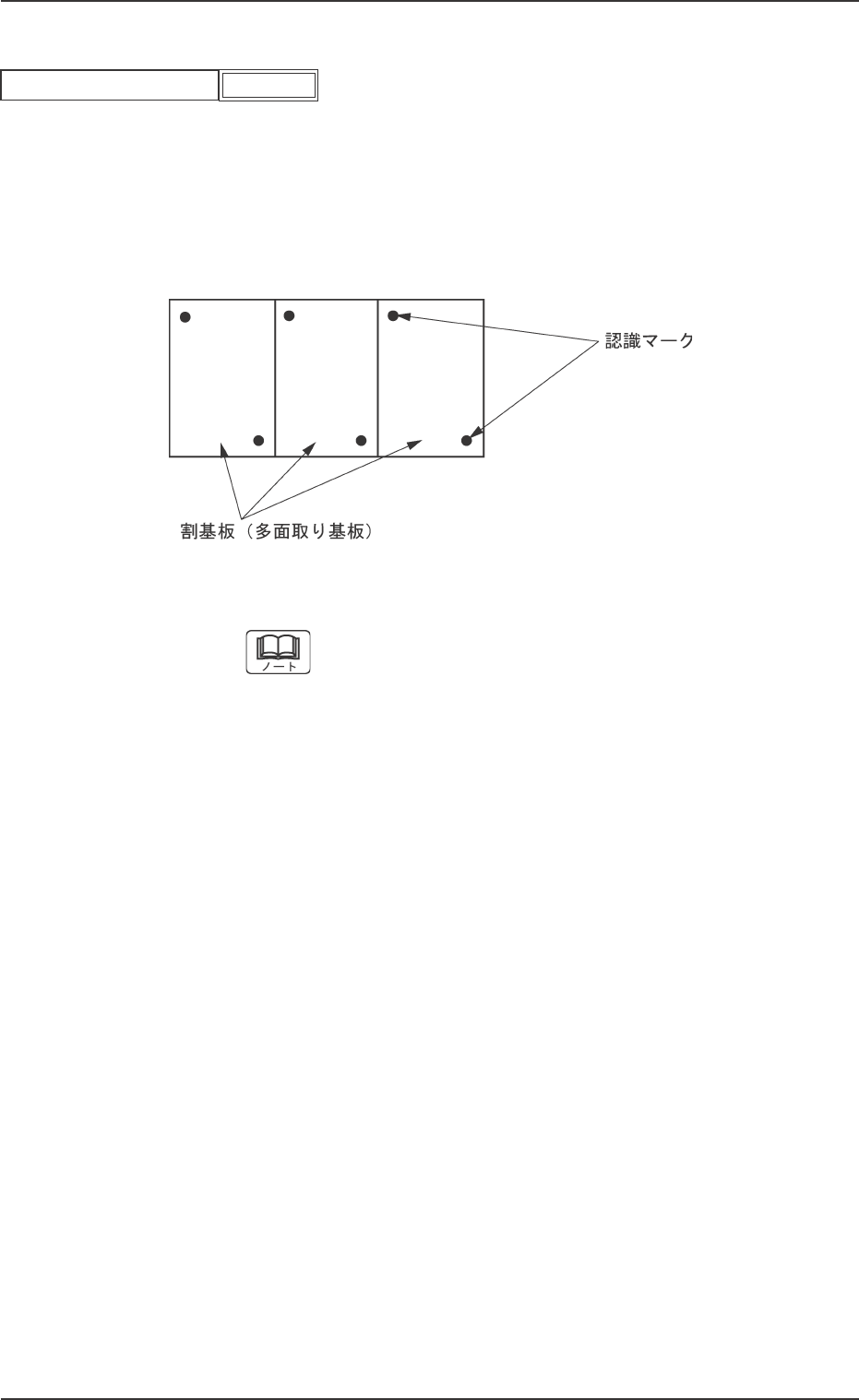
基板認識方法 割り認識
“基板認識機能選択”を“認識する”に設定した場合、割り認識の設
定を以下から選択します。
認識しない : 割り基板の認識を行いません。
認識する : 割り基板の認識を行います。
Fig.3B48
全体認識と割り認識を併用した場合は、認識動作は両方行い
ますが、装着座標の補正は割り認識の結果を使用します。
0111-003 2-27 AGH01JDTP
認識する
基板認識方法 割り認識
Fig.3B47
2.3 オペレーションデータ