3OM-1053-002.pdf - 第48页
2.3 オペレーションデータ 0206-004 2 - 29 AGH01JDTP 基板認識方法 個々認識 基板認識方法 個々認識 基板認識方法 個々認識 基板認識方法 個々認識 基板認識方法 個々認識 “基板認識機能選択” を “認識する” に設定した場合、個々認識の設 定を以下から選択します。 認識しない : 個々認識を行いません。 認識する : 個々認識を行います。 認識しない Fig.3B48-2 基板認識方法 個々認識
基板認識方法 割り認識基板認識方法 割り認識
基板認識方法 割り認識基板認識方法 割り認識
基板認識方法 割り認識
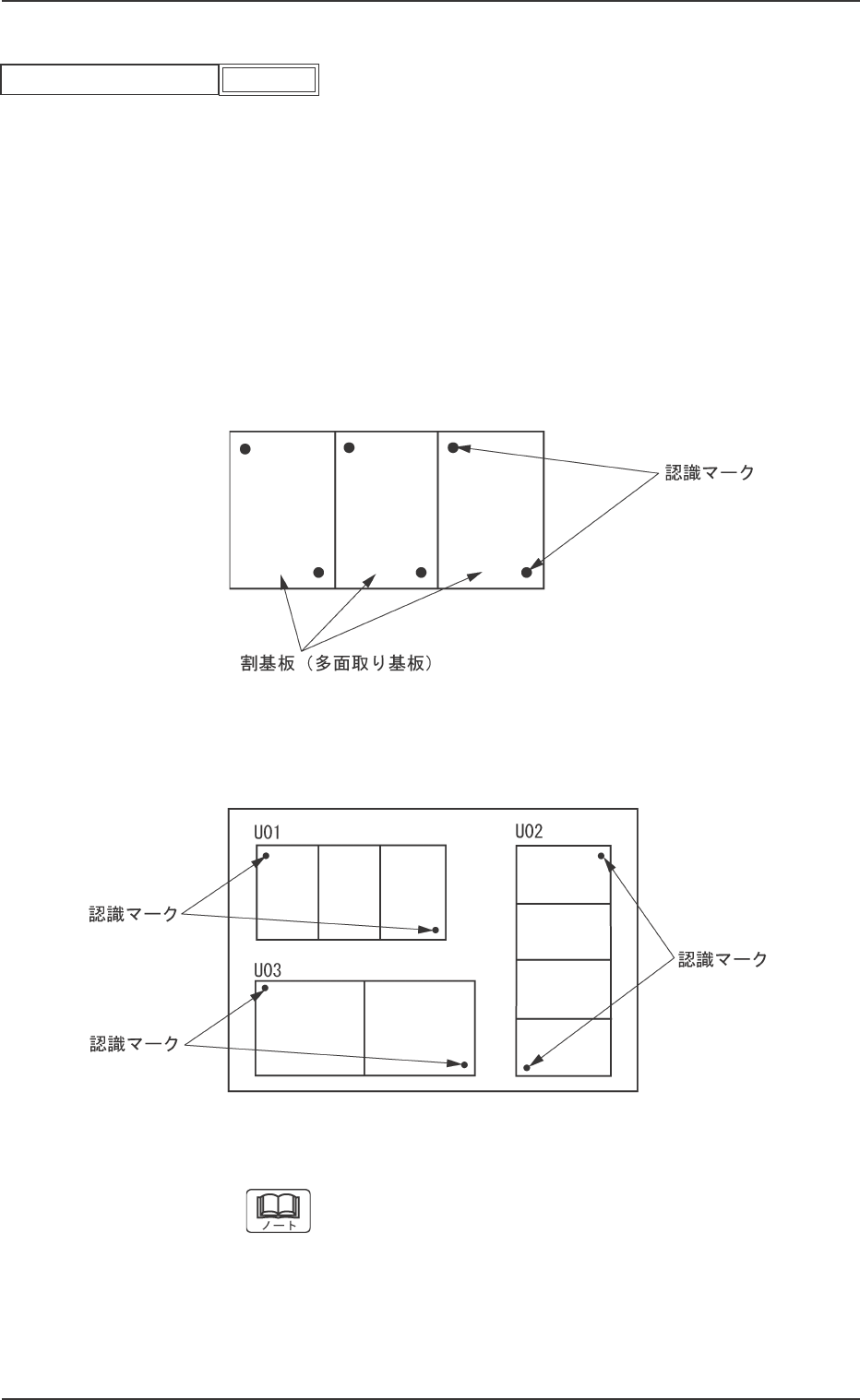
“基板認識機能選択”を“認識する”に設定した場合、割り認識の設
定を以下から選択します。
認識しない : 割り基板の認識を行いません。
認識する : 割り基板の認識(2 点認識)を行います。
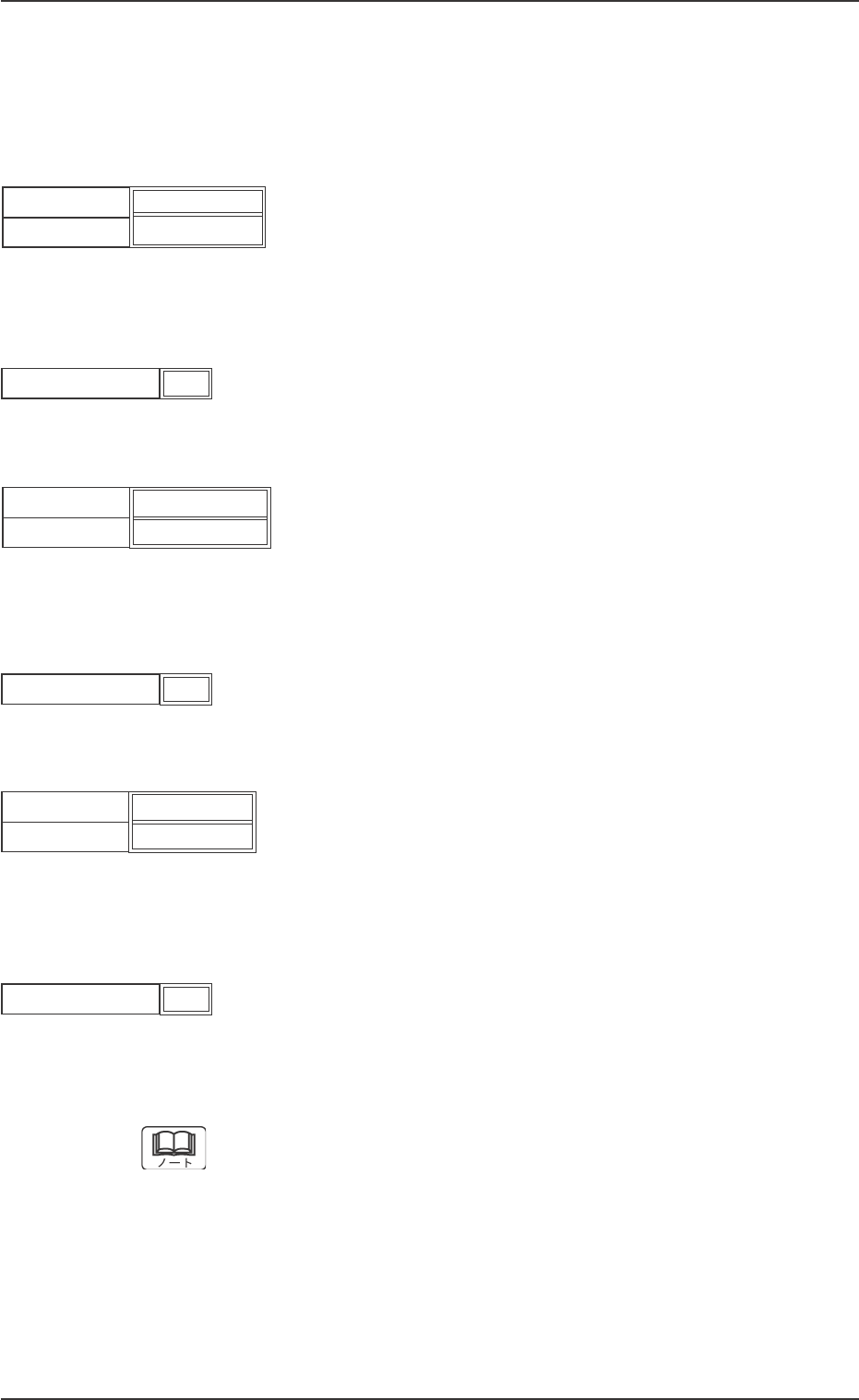
Un 全体 : 1 つのユニットを 1 つの割りとして、基板の認識を
行います。
割り認識“認識する”例
Fig.3B48
割り認識“Un 全体”例
Fig.3B48-1
全体認識と割り認識を併用した場合は、認識動作は両方行い
ますが、装着座標の補正は割り認識の結果を使用します。
0206-004 2-28
AGH01JDTP
2.3 オペレーションデータ
認識する
基板認識方法 割り認識
Fig.3B47

2.3 オペレーションデータ
0206-004 2-29 AGH01JDTP
基板認識方法 個々認識基板認識方法 個々認識
基板認識方法 個々認識基板認識方法 個々認識
基板認識方法 個々認識
“基板認識機能選択”を“認識する”に設定した場合、個々認識の設
定を以下から選択します。
認識しない : 個々認識を行いません。
認識する : 個々認識を行います。
認識しない
Fig.3B48-2
基板認識方法 個々認識
2.3 オペレーションデータ
0206-004 2-30 AFM01JGP
((
((
(
A02_02A02_02
A02_02A02_02
A02_02
))
))
)
全体認識全体認識
全体認識全体認識
全体認識
基板認識機能選択の全体認識を使用する場合、各認識マークの座標
とマーク No. を設定します。
11
11
1
点目 点目
点目 点目
点目
XX
XX
X
((
((
(
横横
横横
横
))
))
)
、、
、、
、
YY
YY
Y
((
((
(
縦縦
縦縦
縦
))
))
)
1 点目認識マークの座標を設定します。
単位: mm
11
11
1
点目 マーク点目 マーク
点目 マーク点目 マーク
点目 マーク
No.No.
No.No.
No.
1 点目認識マーク No. を設定します。
22
22
2
点目 点目
点目 点目
点目
XX
XX
X
((
((
(
横横
横横
横
))
))
)
、、
、、
、
YY
YY
Y
((
((
(
縦縦
縦縦
縦
))
))
)
2 点目認識マークの座標を設定します。
単位: mm
22
22
2
点目 マーク点目 マーク
点目 マーク点目 マーク
点目 マーク
No.No.
No.No.
No.
2 点目認識マークデータ No. を設定します。
33
33
3
点目 点目
点目 点目
点目
XX
XX
X
((
((
(
横横
横横
横
))
))
)
、、
、、
、
YY
YY
Y
((
((
(
縦縦
縦縦
縦
))
))
)
3 点目認識マークの座標を設定します。
単位: mm
33
33
3
点目 マーク点目 マーク
点目 マーク点目 マーク
点目 マーク
No.No.
No.No.
No.
3 点目認識マークデータ No. を設定します。
マークNo.については、“(A03)基板認識マークデータ”を参照してくだ
さい。
11点目 マークNo.
Fig.3B50
12点目 マークNo.
Fig.3B52
13点目 マークNo.
Fig.3B54
10.000 [mm]
10.000 [mm]
1点目 X(横)
1点目 Y(縦)
Fig.3B49
100.000 [mm]
100.000 [mm]
2点目 X(横)
2点目 Y(縦)
Fig.3B51
0.000 [mm]
0.000 [mm]
Fig.3B53
3点目 X(横)
3点目 Y(縦)