UR5_User_Manual_zh_Global.pdf - 第114页
13.7 安装设置 → 安装 13.7 安装设置 → 安装 此处可指定机器人手臂的安装。这有两个作用: 1. 在屏幕上正确显示机器人手臂。 2. 告知控制器重力方向。 控制器 运用 高级动 力学 模型确 保机 器人手 臂平 稳精确 地运 动,并使 机器 人手臂 处于 自由 驱动 模 式时 能够 自我支 撑。为 此,机器 人手 臂的安 装务 必设 置正 确,这一 点至 关重要。 警告 : 如 果 没 有 正 确 地 设 置 机 器 人 手…
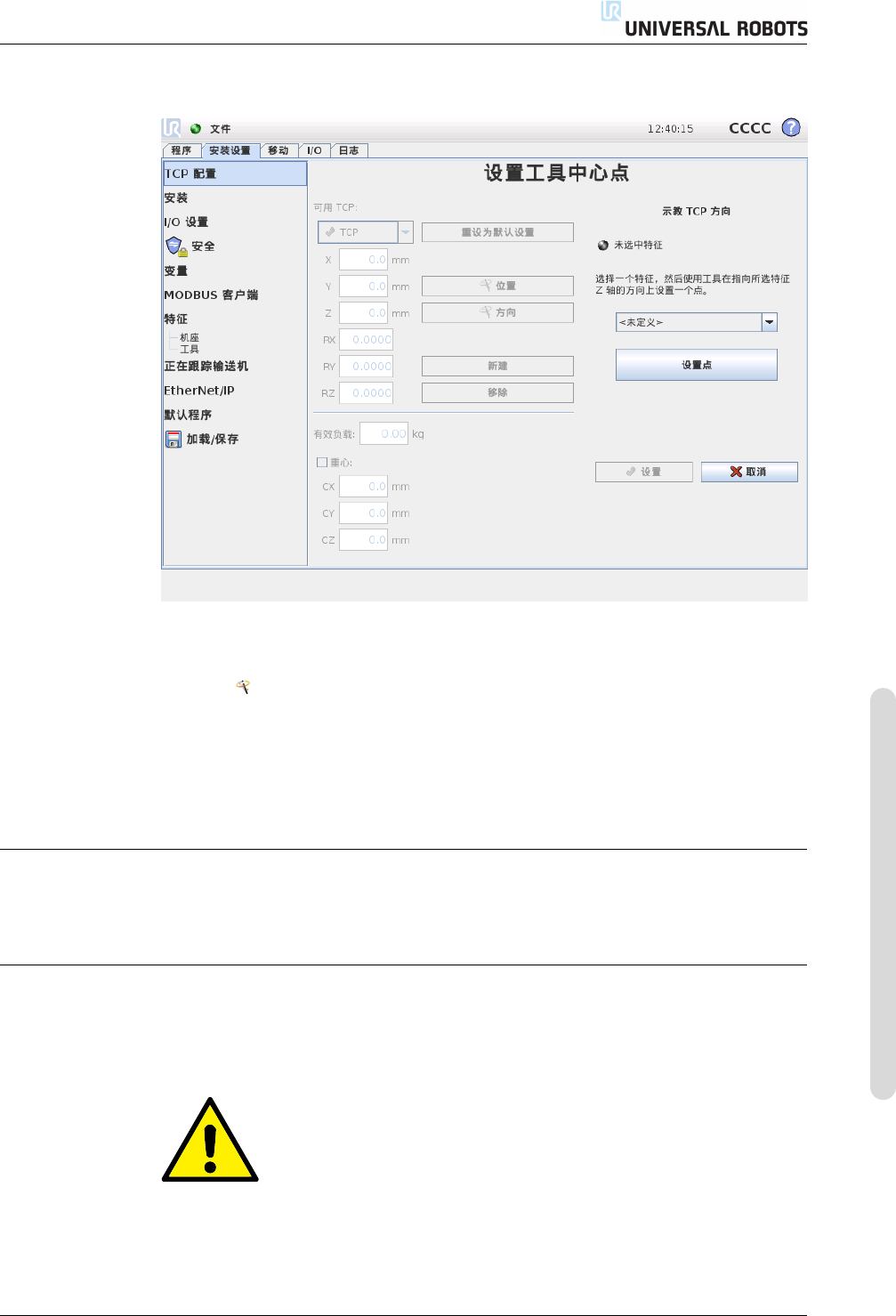
13.6 安装设置 → TCP 配置
13.6.4 示教 TCP 方向
TCP 方向可通过以下步骤自动计算:
1. 点击 方向按钮。
2. 从下拉列表中选择一个特征。关于如何定义新特征的详细信息,请参见 13.12。
3. 使用下面的按钮移至工具相对于 TCP 的方向与所选特征的坐标体系一致的点
上。
4. 验证计算所得的 TCP 方向,并使用设置按钮将其设定到所选的 TCP 上。
13.6.5 负载
机器人工具重量在屏幕的下半部分指定。要更改此设置,只需点击空白文字字段并
输入新值。所作设置将应用于所有指定的 TCP。
13.6.6 重心
工具重心可以使用字段 CX、CY 和 CZ 来指定。如果未进行指定,工具中心点将
被指定为工具的重心。所作设置将应用于所有指定的 TCP。
警告:
务必使用正确的安装设置。与程序一起保存并加载安装设置文件。
版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
II-39 CB3
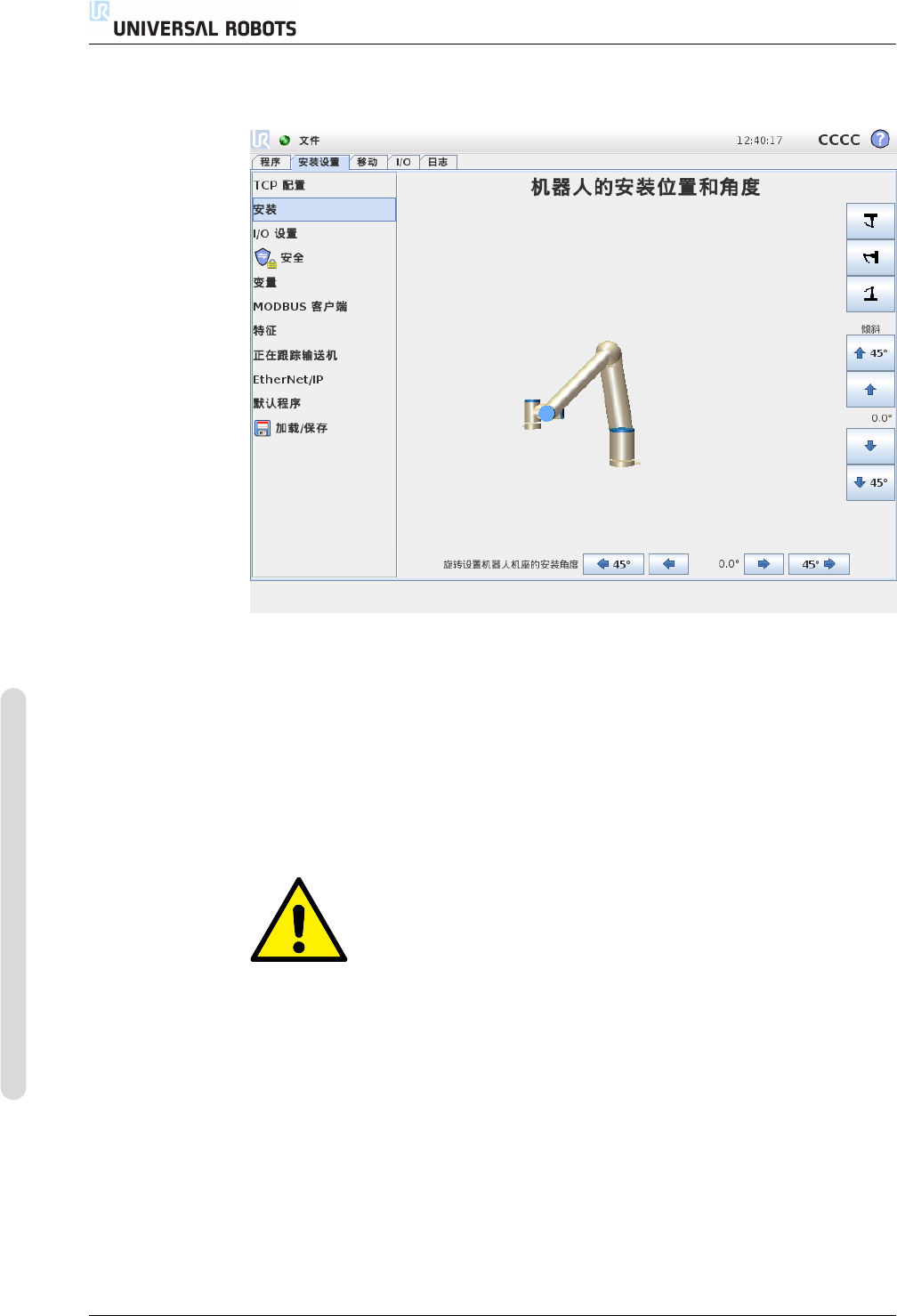
13.7 安装设置 → 安装
13.7 安装设置 → 安装
此处可指定机器人手臂的安装。这有两个作用:
1. 在屏幕上正确显示机器人手臂。
2. 告知控制器重力方向。
控制器运用高级动力学模型确保机器人手臂平稳精确地运动,并使机器人手臂处于
自由驱动模式时能够自我支撑。为此,机器人手臂的安装务必设置正确,这一点至
关重要。
警告:
如果没有正确地设置机器人手臂的安装,这将导致频繁的安全停
止,和/或机器人手臂在自由驱动按钮按下时会活动的这一可能。
系统默认机器人手臂安装在平稳的台面或地面上,此情况下,无需对此屏幕进行任
何更改。但是,如果机器人手臂采用吊顶式、壁挂式安装或呈一定角度安装,则需
使用屏幕中的按钮对其进行调整。 屏幕右侧的按钮可用于设置机器人手臂的安装角
度。右侧前三个按钮可将角度设置为吊顶(180
◦
)、墙壁 (90
◦
)、地面(0
◦
)。倾斜
按钮可用于设置任意角度。 屏幕底部的按钮用于旋转机器人手臂的安装角度,以与
实际安装角度保持一致。
CB3 II-40 版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
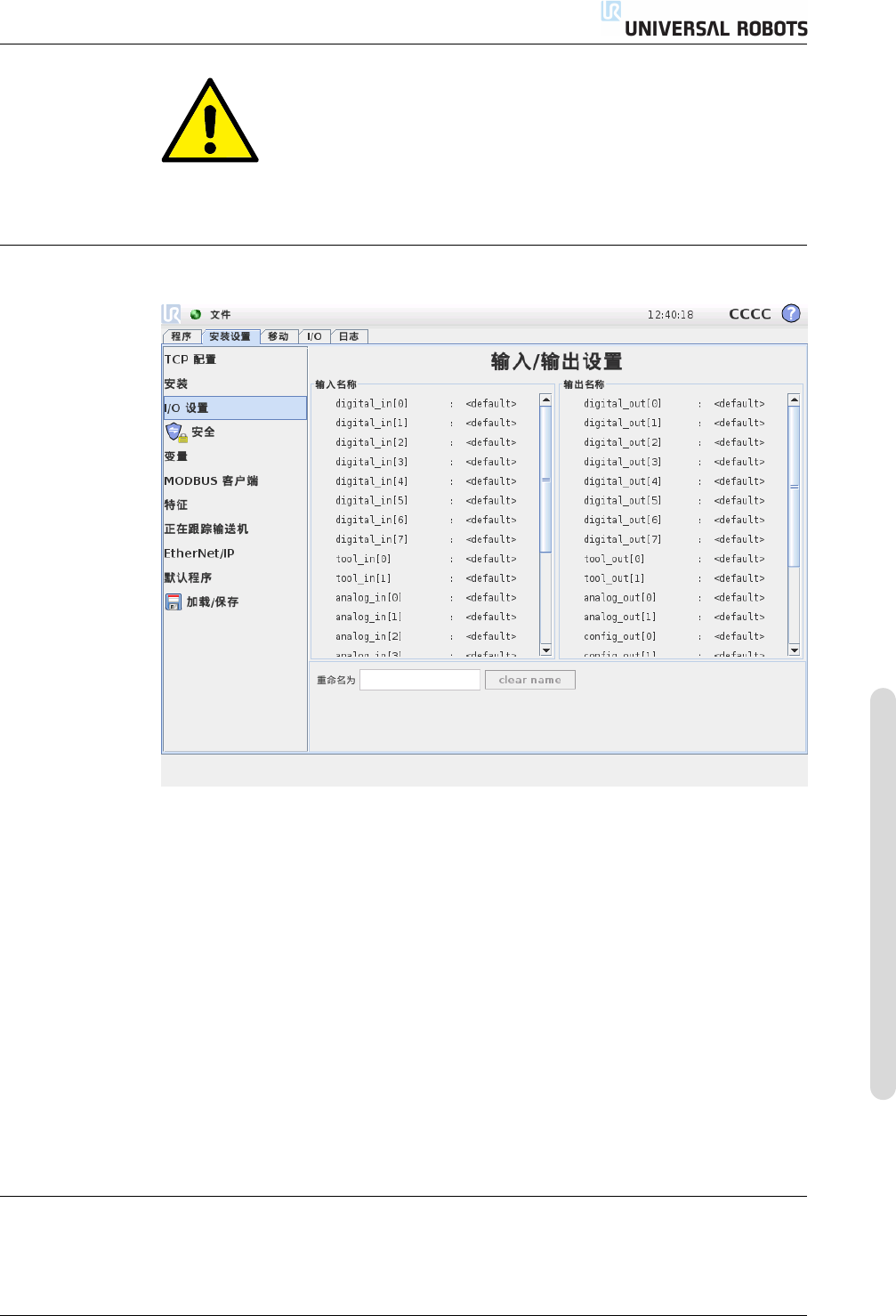
13.8 安装设置 → I/O 设置
警告:
务必使用正确的安装设置。与程序一起保存并加载安装设置文件。
13.8 安装设置 → I/O 设置
可为输入和输出信号指定名称。这样更便于记住操作机器人时信号的作用。单击选
择相应的 I/O 并使用屏幕键盘设置信号名称。通过将名称设置为空字符串,可以还
原名称。
可配置八个标准数字输入和两个工具来触发动作。可用动作包括启动当前程序、停
止当前程序、暂停当前程序以及在输入高/低时进入/离开自动驱动模式的功能(就
像 “示教盒” 背面的自动驱动按钮)。
默认的输出行为就是,它们的值在程序停止运行时得以保留。还可以配置一个只要
没有程序运行时便采用的默认输出值。
此外,还可以配置八个标准数字输出和两个工具输出来反映当前是否有程序在运行,
以便在有程序运行时输入为高,反之为低。
最后,也可指定是否可(由编程员或操作员和编程员合作)通过 I/O 选项卡控制输
出,或指定是否只有机器人程序可更改输出值。
13.9 安装设置 → 安全
参见第 10章。
版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
II-41 CB3