UR5_User_Manual_zh_Global.pdf - 第131页
14.2 程序选项卡 14.2.2 程序执行指示 程序树 以可 视化线 索告 知当前 机器 人控制 器正 在执行 的命 令。命令 图标 左侧显 示小 图标 ,正在执行 的命令名 称和以该 命令为子 命令(通常 用 / 命 令图标标 示) 的 所 有 命 令 都 以 蓝 色 高 亮 显 示。 这 可 以 帮 助 使 用 者 在 程 序 树 中 找 到 正 在 执 行 的 命 令。 例如,如 果机器 人手臂 正在朝 着一个 路点移 动,则标…
14.2 程序选项卡
14.2 程序选项卡
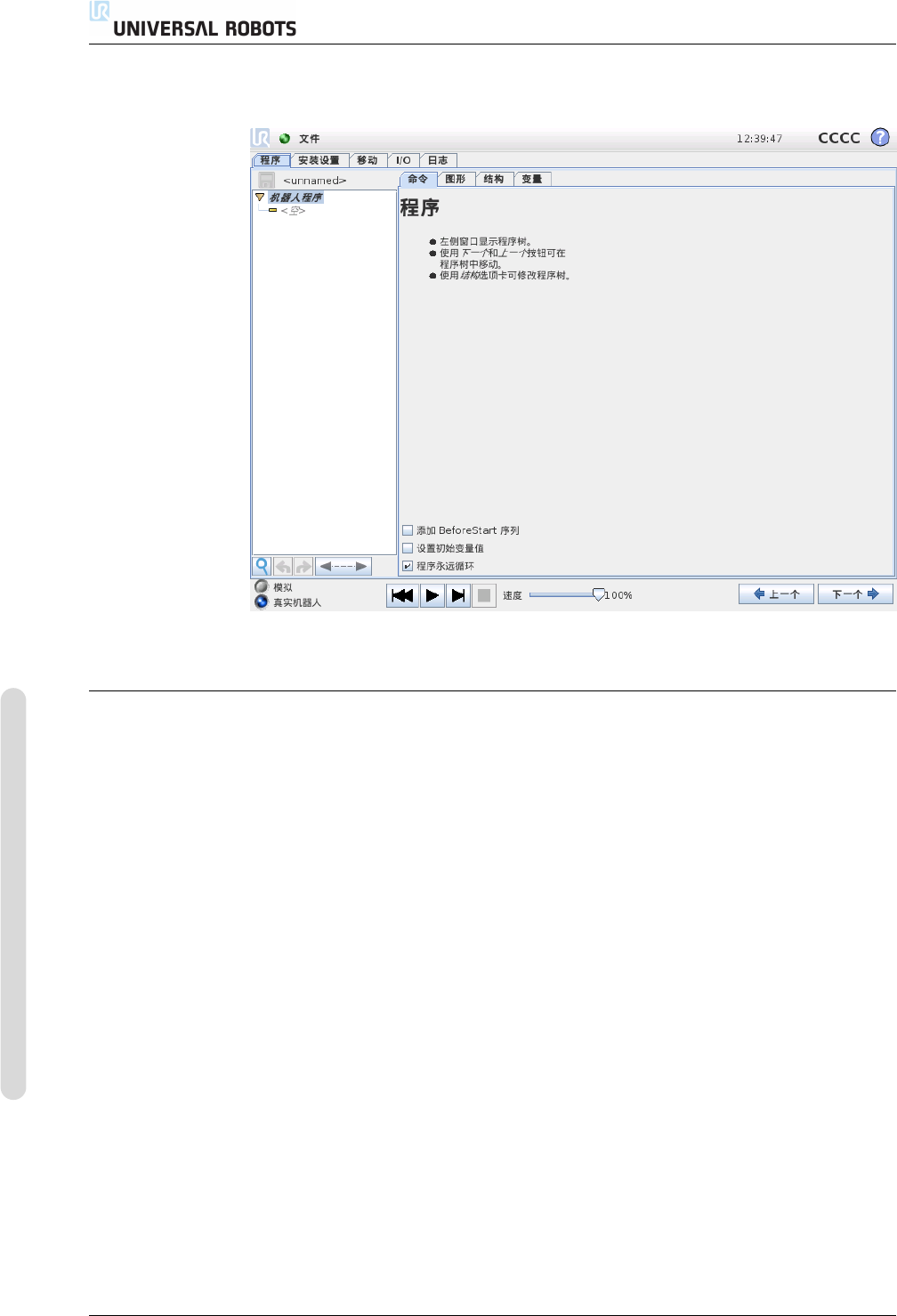
“程序” 选项卡显示要编辑的当前程序。
14.2.1 程序树
屏幕左侧的程序树以命令列表形式显示该程序,屏幕右侧区域显示与当前命令相关
的信息。当前命令可通过单击命令列表来选择,或使用屏幕右底部的上一个和下一个
按钮来选择。可使用结构选项卡来插入或移除命令(如 14.30所述)。程序名称显示
在命令列表正上方,旁边有一个小的磁盘图标,单击此图标可快速保存程序。
在程序树中,当前正在执行的命令高亮显示,如 14.2.2 中所示。
CB3 II-56 版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
14.2 程序选项卡
14.2.2 程序执行指示
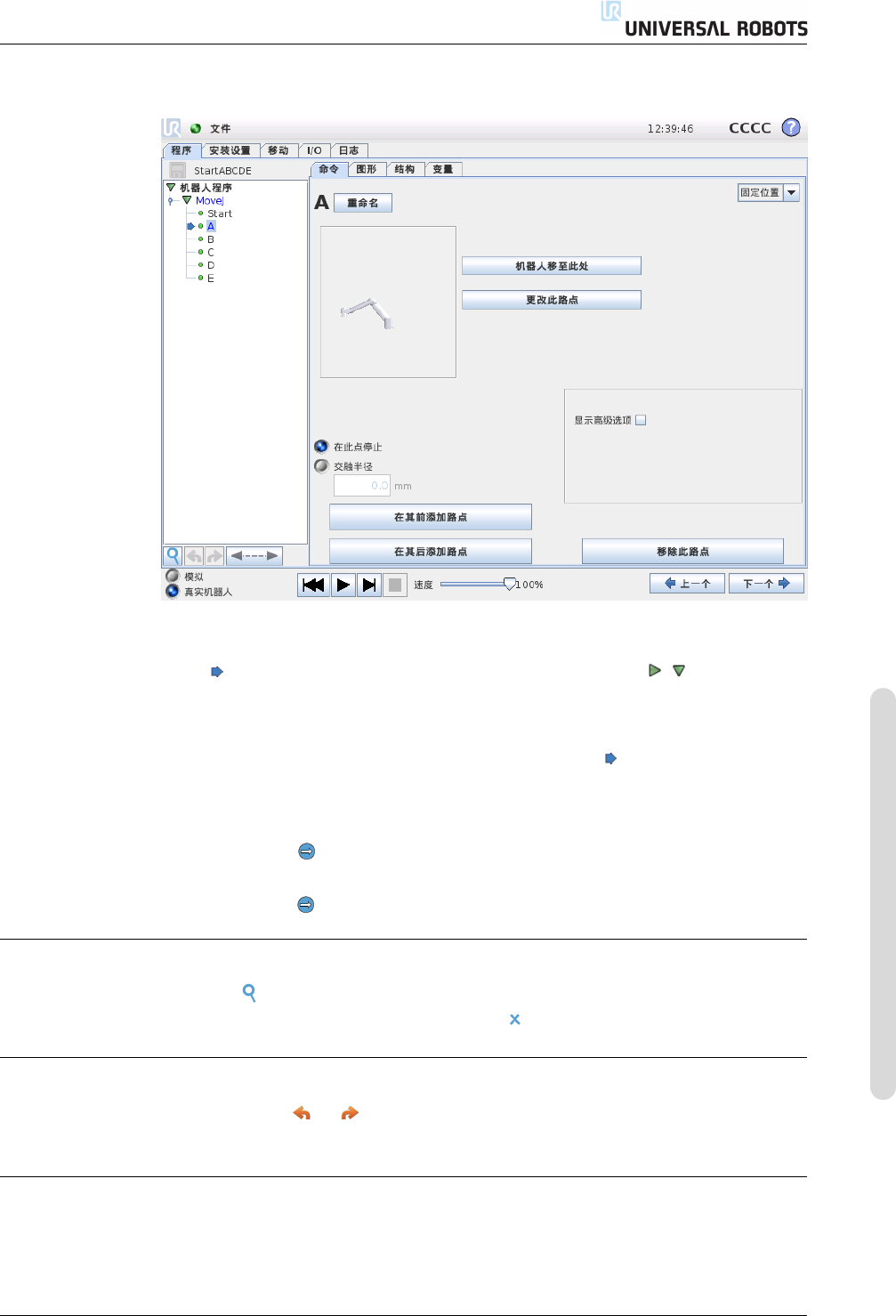
程序树以可视化线索告知当前机器人控制器正在执行的命令。命令图标左侧显示小
图标 ,正在执行的命令名称和以该命令为子命令(通常用 / 命令图标标示)
的所有命令都以蓝色高亮显示。这可以帮助使用者在程序树中找到正在执行的命
令。
例如,如果机器人手臂正在朝着一个路点移动,则标有 图标的相应路点子命令
及其名称以及其所属的 “移动” 命令(参见 14.5)的名称以蓝色高亮显示。
如果程序暂停,则程序执行指示图标将标示出正在执行中的最后一条命令。
点击程序树下带 图标的按钮,将跳转到程序树中当前正在执行或最后执行的命
令。如果在程序运行期间点击了某个命令,则命令选项卡将一直显示该所选命令的
相关信息。按下 按钮将使命令选项卡上一直显示当前正在执行的命令的信息。
14.2.3 搜索按钮
带有图标 的按钮可用于在程序树中执行文本搜索。当点击时,可输入搜索文本,
匹配的程序节点将以黄色高亮显示。按图标 退出搜索模式。
14.2.4 撤销/重做按钮
程序树下方标有 和 图标的按钮用于撤销和重做在程序树及其所含命令中所做
的更改。
14.2.5 程序仪表板
屏幕最底部是仪表板。仪表板上有一组类似于老式磁带录音机按键的按钮,使用这
些按钮可以启动、停止、单步调试和重新启动程序。速度滑块让您可以随时调节程
序速度,程序速度直接影响着机器人的运动速度。此外,速度滑块可以实时显示机
版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
II-57 CB3
14.3 变量
器人手臂移动的相对速度,并将安全设置考虑在内。显示的百分比是该运行程序在
不触犯安全限值的情况下可实现的最大速度。
仪表板左侧的模拟和真实机器人按钮可切换程序运行方式,选择是以模拟形式运行还
是在真实机器人上运行。以模拟形式运行时,机器人手臂不会运动,因此不会因碰
撞而受损或损坏附近任何设备。如果不确定机器人手臂将要执行的动作,可使用模
拟形式测试程序。
危险:
1. 按下播放按钮后,确保置身在机器人工作空间外。你设定的运
动可能不同于预期的运动。
2. 按下步进按钮后,确保置身在机器人工作空间外。步进按钮的
功能可能较难理解。仅在非使用不可的情况下才使用。
3. 确保始终通过速度滑块降低程序速度的方式来测试程序。集
成商造成的逻辑编程错误可能导致机器人手臂的意外运动。
4. 当紧急停止或保护停止出现时,机器人程序将停止。只要关节
移动不超过 10
◦
,则可以恢复。当按播放时,机器人将慢慢移
回到轨迹上,然后继续执行程序。
编写程序时,可以使用图形选项卡上的 3D 视角演示机器人的运动效果(如 14.29所
述)。
每个程序命令旁边都有一个小图标,颜色分有红色、黄色和绿色三种。红色图标表
示该命令出错,黄色图标表示命令尚未完成,绿色图标表示一切正常。只有当所有
命令旁边都显示绿色图标时,程序方可运行。
14.3 变量
机器人程序可以在运行时通过变量存储更新变量值。有两种变量可用:
安装变量: 这些变量可以用于多个程序,且变量名和变量值在机器人安装期间持续
存在(详见 13.10)。安装变量在机器人和控制箱重启后保持它们的值。
常规程序变量: 这些变量仅适用于运行程序,且变量值在程序关闭后即丢失。
变量有下述类型:
布尔值 布尔变量,值为真或假。
整数值 整数,范围是 −2147483648 - 2147483647(32 位)。
浮点值 浮点数(十进制)(32 位)。
字符串 字符序列。
位姿 矢量,指示笛卡尔空间中的位置和方向。位置矢量 (x, y, z) 和旋转矢量
(rx, ry, rz) 的集合,表示方向,书写形式 p[x, y, z, rx, ry, rz]。
列表 变量序列。
CB3 II-58 版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。