UR5_User_Manual_zh_Global.pdf - 第116页
13.10 安装设置 → 变量 13.10 安装设置 → 变量 此处创 建的 变量 称为安 装设 置变量, 可以 像一般 的程 序辩论 一样 使用。安 装设 置变 量 非 常 特 殊,因 为 即 使 当 程 序 被 中 断 而 后 又 重 新 启 动, 以 及当 机 器 人 手 臂 和 / 或 控 制箱断 电而 后又 重新上 电,它 们的值 依然 保留着。 它们 的名称 和值 都储存 在安 装设 置中,因此可以在多个程序中使用相同的变量…
13.8 安装设置 → I/O 设置
警告:
务必使用正确的安装设置。与程序一起保存并加载安装设置文件。
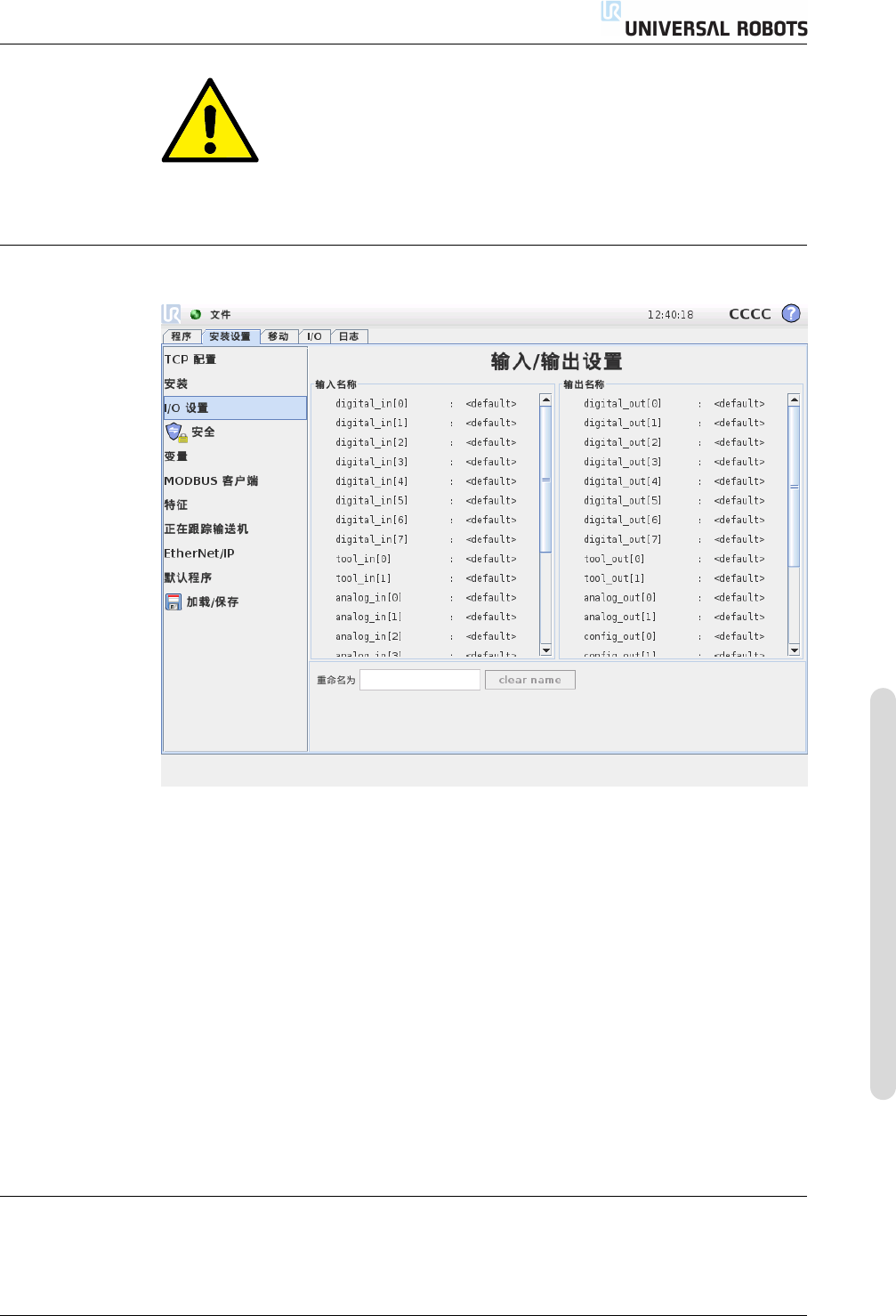
13.8 安装设置 → I/O 设置
可为输入和输出信号指定名称。这样更便于记住操作机器人时信号的作用。单击选
择相应的 I/O 并使用屏幕键盘设置信号名称。通过将名称设置为空字符串,可以还
原名称。
可配置八个标准数字输入和两个工具来触发动作。可用动作包括启动当前程序、停
止当前程序、暂停当前程序以及在输入高/低时进入/离开自动驱动模式的功能(就
像 “示教盒” 背面的自动驱动按钮)。
默认的输出行为就是,它们的值在程序停止运行时得以保留。还可以配置一个只要
没有程序运行时便采用的默认输出值。
此外,还可以配置八个标准数字输出和两个工具输出来反映当前是否有程序在运行,
以便在有程序运行时输入为高,反之为低。
最后,也可指定是否可(由编程员或操作员和编程员合作)通过 I/O 选项卡控制输
出,或指定是否只有机器人程序可更改输出值。
13.9 安装设置 → 安全
参见第 10章。
版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
II-41 CB3
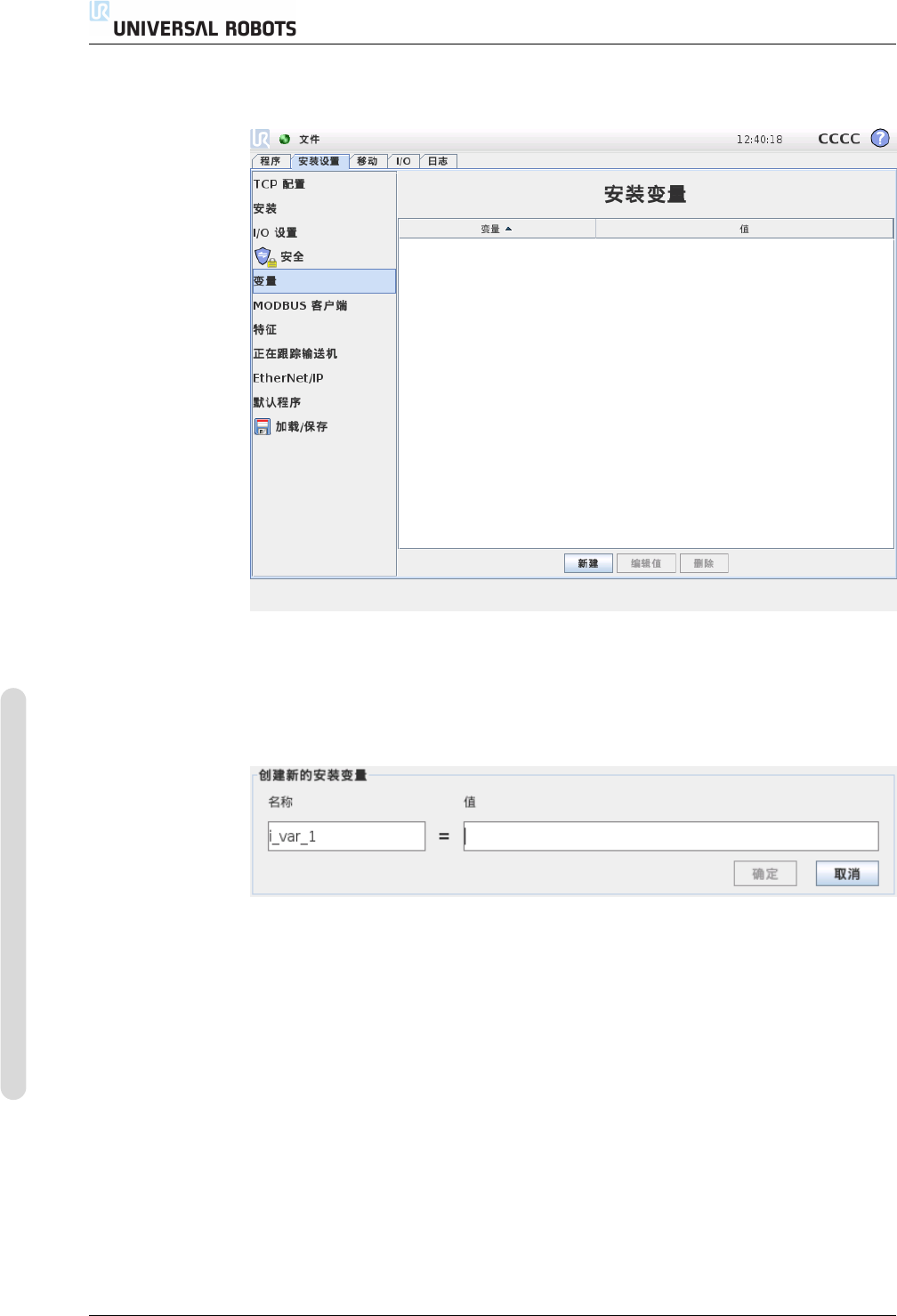
13.10 安装设置 → 变量
13.10 安装设置 → 变量
此处创建的变量称为安装设置变量,可以像一般的程序辩论一样使用。安装设置变
量非常特殊,因为即使当程序被中断而后又重新启动,以及当机器人手臂和/或控
制箱断电而后又重新上电,它们的值依然保留着。它们的名称和值都储存在安装设
置中,因此可以在多个程序中使用相同的变量。
按新建 ,板上将出现含有新变量建议的名称。该变量名称可以更改,变量值可以通
过触摸文本字段输入。只有在这个新名称在该安装设置没有使用的情况下,才可以
点击 OK-按钮。
将列表中的变量高亮,按后点击编辑数值,可以更改安装设置变量值。
要删除变量,在列表中选中它,然后单击删除。
安装 设置 变量 配 置结 束后,需 保存 安 装设 置本 身,从 而保 存这 些 配置,请 参
阅 13.5。安装设置变量及其值每 10 分钟会自动保存一次。
如果加载了程序或安装设置,并且一个或一个以上的程序变量与安装设置变量的名
称相同,用户将有两种选择来解决这一问题:要么选用名称相同的安装设置变量而
不是程序变量,要么对相冲突的变量进行自动更名。
CB3 II-42 版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
13.11 安装 → MODBUS 客户端 I/O 设置
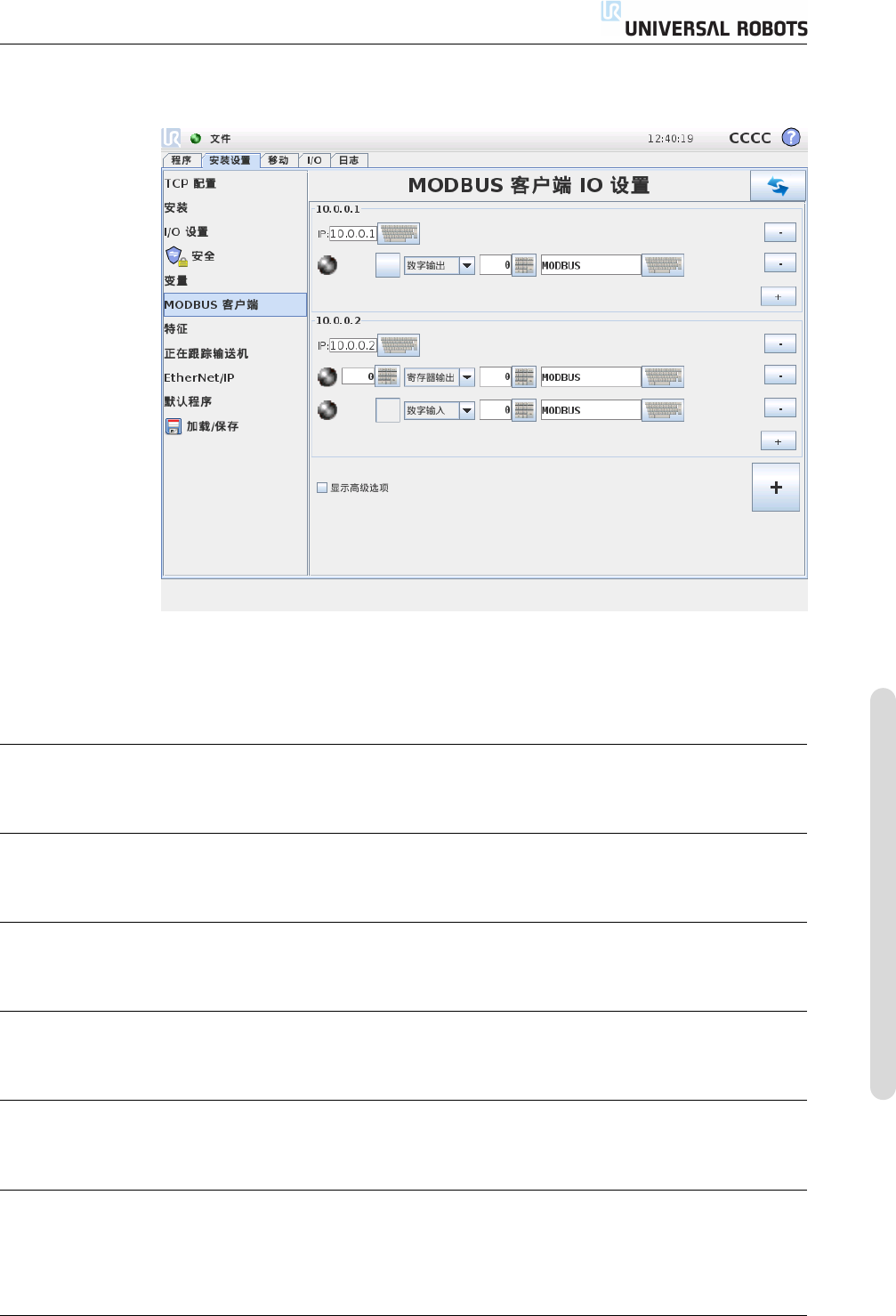
13.11 安装 → MODBUS 客户端 I/O 设置
此处可设置 MODBUS 客户端(主机)信号。可由输入/输出信号(寄存器或数字)
创建与指定 IP 地址的 MODBUS 服务器(或从设备)的连接。每个信号都有唯一
的名称,因此可用在程序中。
刷新
按此按钮可刷新所有 MODBUS 连接。
添加设备
按此按钮可添加新的 MODBUS 设备。
删除设备
按此按钮可删除 MODBUS 设备和已添加到设备的所有信号。
设置设备 IP
此处将显示 Modbus 设备的 IP 地址。按此按钮可更改 IP 地址。
添加信号
按此按钮可添加信号到相应的 MODBUS 设备上。
删除信号
按此按钮可从相应的 MODBUS 设备上删除信号。
版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
II-43 CB3