UR5_User_Manual_zh_Global.pdf - 第125页
13.16 加载屏幕 13.16 加载屏幕 在此 屏幕,您 可选 择要加 载的 程序。 此屏幕 有两 个版 本:一个 用于 加载程 序和 执行 程序,一个用于编辑程序。 注意 : 不 建 议 从 USB 设 备 运 行程 序。 若 要 运 行 USB 驱动 上 的 程 序, 先 通过 文件 菜单下的 另存为 . . . 将其加载并保存到本地 程序 文件夹下。 主要差 异在 于用 户可执 行的 是哪个。 在基本 加载 屏幕中, 用户 只能…
13.15 日志选项卡
请注意,启动电流输入信号等级未被定义,选择一个与信号等级启动相匹配的过渡
将立即启动程序。此外,离开运行程序屏幕或按压仪表板上的停止按钮将使自动启
动特征失效,直到再次按压运行按钮。
13.14.3 自动初始化
机器人手臂可自动初始化,例如,当控制箱接通电源时。对于特定的外部输入信号
边缘过渡,机器人手臂将完全被初始化,而不考虑可见屏幕。
初始化的最后一步是制动器释放。当机器人释放制动器后,它会移动一小步,并且
发出声音。另外,如果配置的安装角度与基于传感器数据而得到的安装角度不相符,
数据制动器将不能自动释放。在这种情况下,就需要在初始化屏幕(请参阅 11.5)
中对机器人进行手动初始化。
请注意,启动电流输入信号等级未被定义,选择一个与信号等级启动相匹配的过渡
将立即初始化机器人手臂。
13.15 日志选项卡
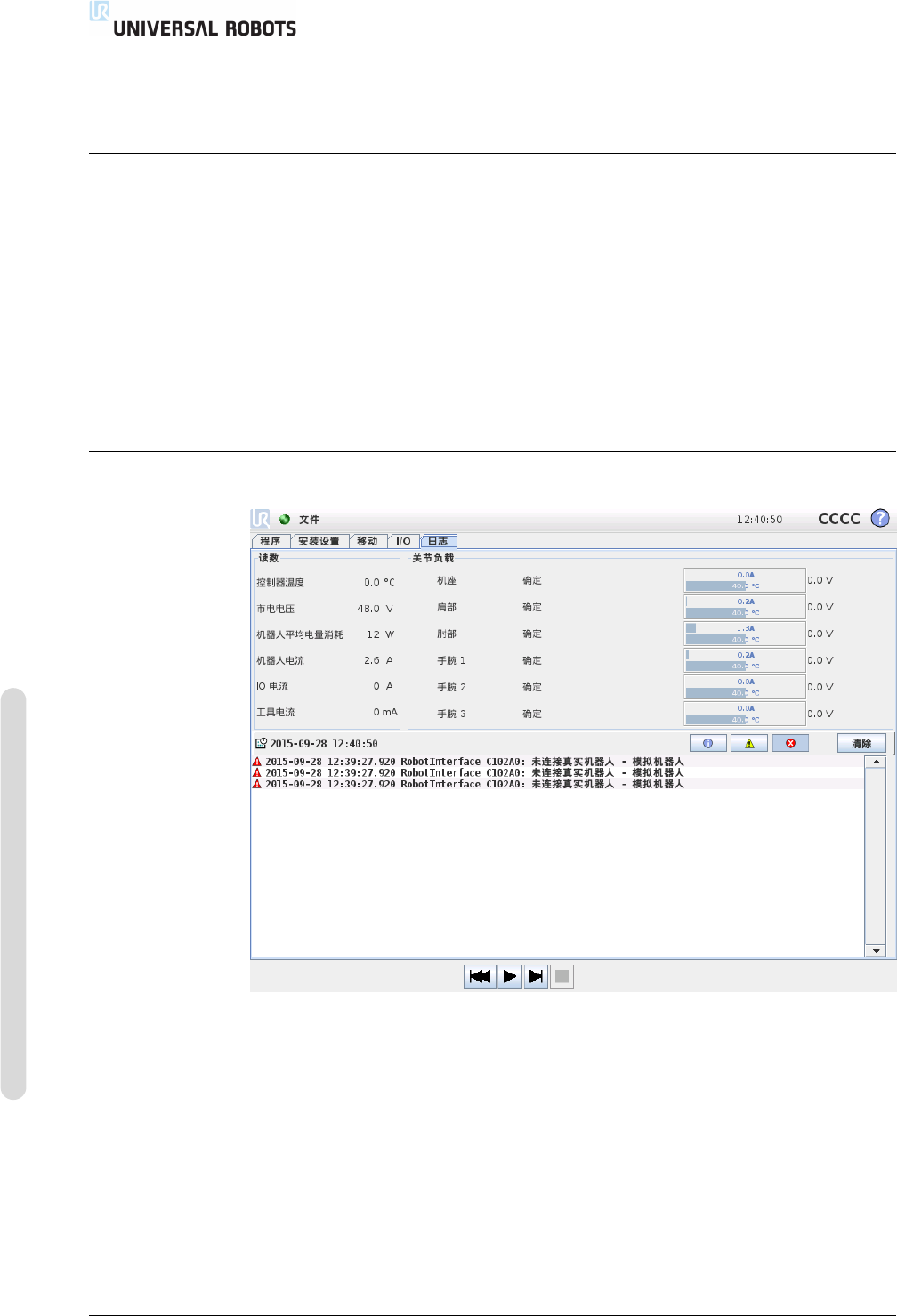
机器人状况 屏幕上半部分显示机器人手臂和控制箱状况。左侧显示机器人控制箱
的相关信息,右侧显示机器人每个关节的相关信息。机器人每个关节相关信息包括
电机和电子设备的温度、关节负载以及关节处的电压。
机器人日志 屏幕下半部分显示日志消息。第一列将日志记录的严重性分类。第二
列显示消息到达时间。下一列显示消息发送人。最后一列显示具体消息。消息可以
通过切换按钮(与严重性相对应)进行过滤。上图显示错误会被显示,而信息和警
告消息会被过滤。一些日志消息的设计初衷就是提供更多信息,可以通过选定日志
记录进行访问。
CB3 II-50 版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
13.16 加载屏幕
13.16 加载屏幕
在此屏幕,您可选择要加载的程序。此屏幕有两个版本:一个用于加载程序和执行
程序,一个用于编辑程序。
注意:
不建议从 USB 设备运行程序。若要运行 USB 驱动上的程序,先
通过文件菜单下的另存为. . . 将其加载并保存到本地程序文件夹下。
主要差异在于用户可执行的是哪个。在基本加载屏幕中,用户只能访问文件 - 不能
修改或删除文件。此外,用户不允许离开程序文件夹下的目录结构。用户可以向下
访问子目录,但不能访问程序文件夹上一级目录。
因此,所有程序都应放在程序文件夹和/或程序文件夹下的子文件夹。
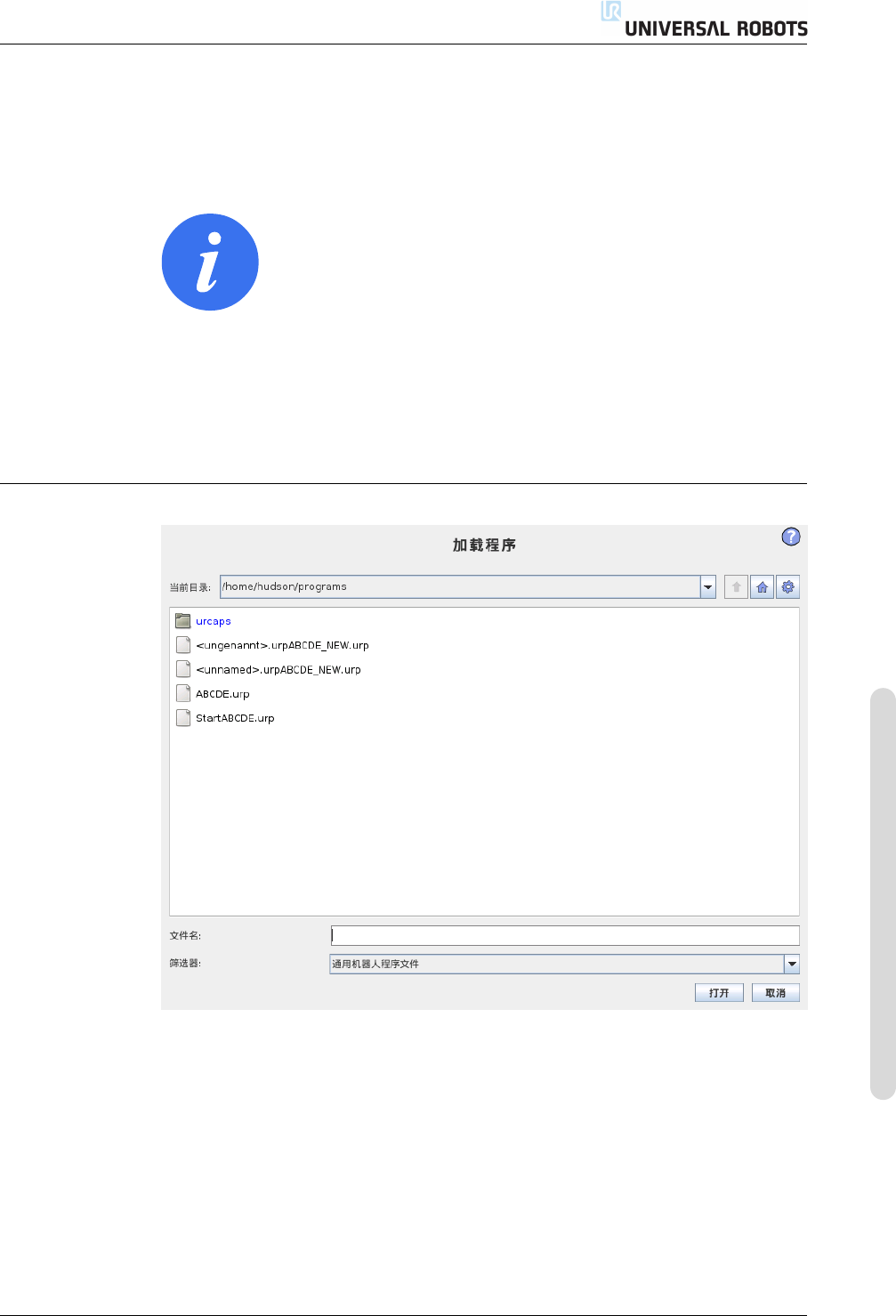
屏幕布局
上图显示的是实际的加载屏幕。包含下述重要区域和按钮:
路径历史记录 路径历史记录显示访问至当前位置所经过的路径的位置。这意味着,
屏幕上将显示直至计算机根目录的所有父目录。此处,你会发现你可能无法访问程
序文件夹以上的所有目录。
选定 列表中 的 文件 夹 名称,而将 对话变 更加载 到该目 录,并 显示在 文件选 择
区 13.16。
版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
II-51 CB3
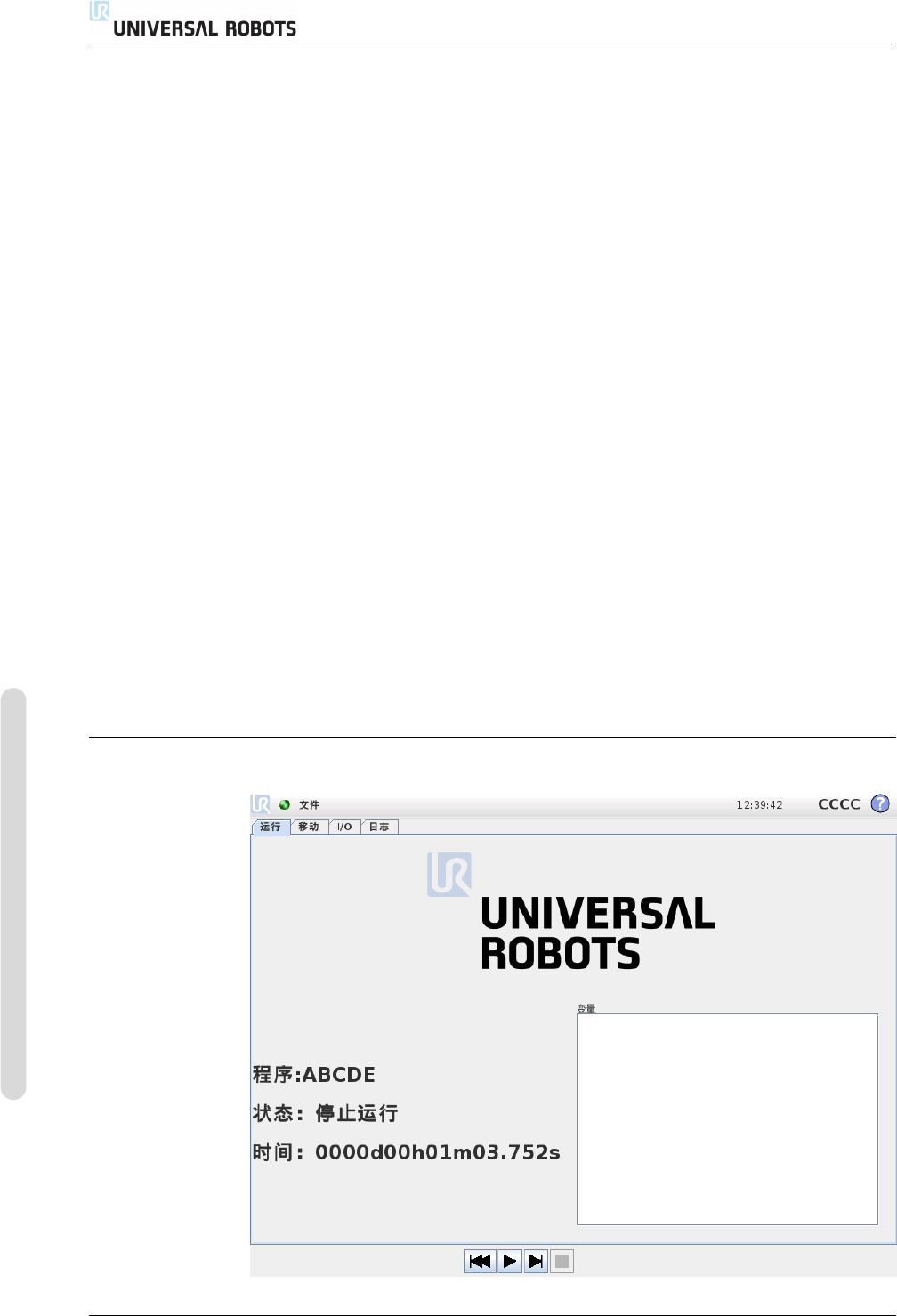
13.17 运行选项卡
文件选择区域 在对话框的此区域,将显示实际的目录。通过这个,用户可以单击
文件名称选定文件,或双击文件名称打开文件。
如果用户双击目录,则对话框会显示文件夹内容。
文件筛选器 使用文件筛选器,用户可设定仅显示自己想要显示的文件类型。选择
“备份文件” 时,文件选择区域将显示每个程序最近保存的 10 个版本,其中,.old0
为最新的版本,.old9 为最老的版本。
文件字段 此处将显示当前所选的文件。用户可以点击字段右侧的键盘图标手动键
入文件名称。屏幕键盘会跳出,用户可以直接在屏幕上输入文件名。
打开按钮 单击 “打开” 按钮可打开当前所选文件并返回上一个屏幕。
取消按钮 单击 “取消” 按钮可终止当前的加载进程,并促使屏幕跳回前一页面。
操作按钮 一系列按钮让用户可以进行一些操作,这些操作以往一般需要用户在传
统的文件对话框中鼠标右键点击文件名才会跳出。此外,还可以在目录结构中直接
向上访问程序文件夹。
• 父目录:在目录结构中上移。该按钮在两种情况下不会启用:当前文件夹是顶
级目录;或屏幕在受限模式且当前目录是程序文件夹。
• 转至程序文件夹:返回主屏幕
• 操作:例如创建目录、删除文件等操作。
13.17 运行选项卡
CB3 II-52 版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。