UR5_User_Manual_zh_Global.pdf - 第139页
14.9 命令:等待 14.9 命令:等待 “ 等待 ” 指定的时间或等待 I/O 信号。 14.10 命令:设置 将数字输出或模拟输出设置为给定值。 版本 3.2 (rev. 18629) . . 版权所有 © 2009-2015 Universal Rob ots A/S 。保留所有权利。 I I-65 CB3
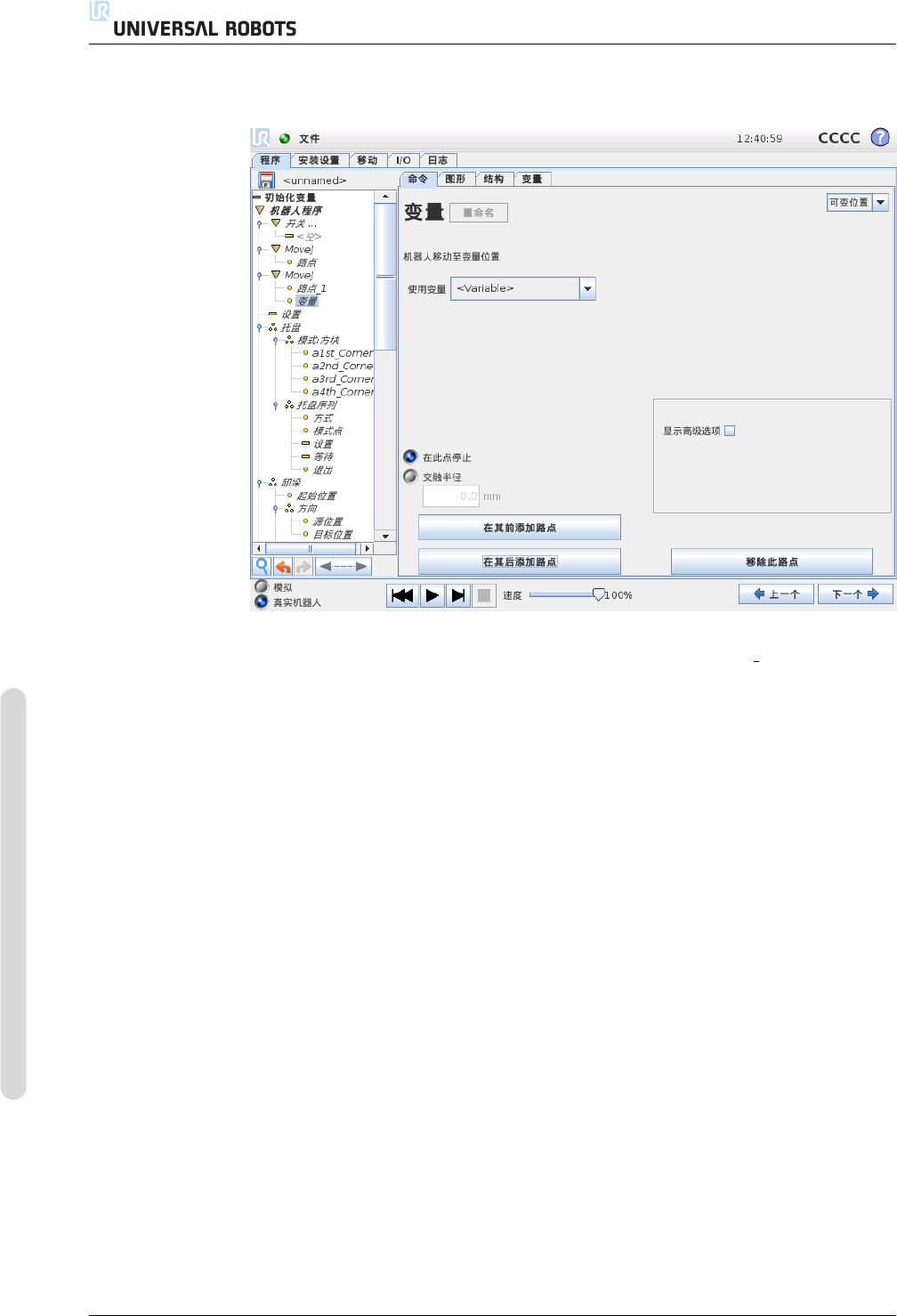
14.8 命令:可变路点
14.8 命令:可变路点
可变路点系指该路点的位置由变量给定,在此情况下,calculated pos 即为变量。变
量必须是一个位姿,例如
var=p[0.5,0.0,0.0,3.14,0.0,0.0]。前三个数字表示 x、y、z 坐标,后三个数字表示方
向,以旋转矢量表示,由矢量 rx、ry、rz 给定。轴长是指要旋转的角度,以弧度表
示,矢量本身给定了要绕之旋转的轴。位置始终是相对于参考框架或坐标系给定的,
由所选特征定义。机器人手臂始终以线性方式移至可变路点。
例如,将机器人沿着工具的 z 轴移动 20mm:
var_1=p[0,0,0.02,0,0,0]
Movel
路点 _1 (可变位置):
使用变量 =var_1, 特征 = 工具
CB3 II-64 版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
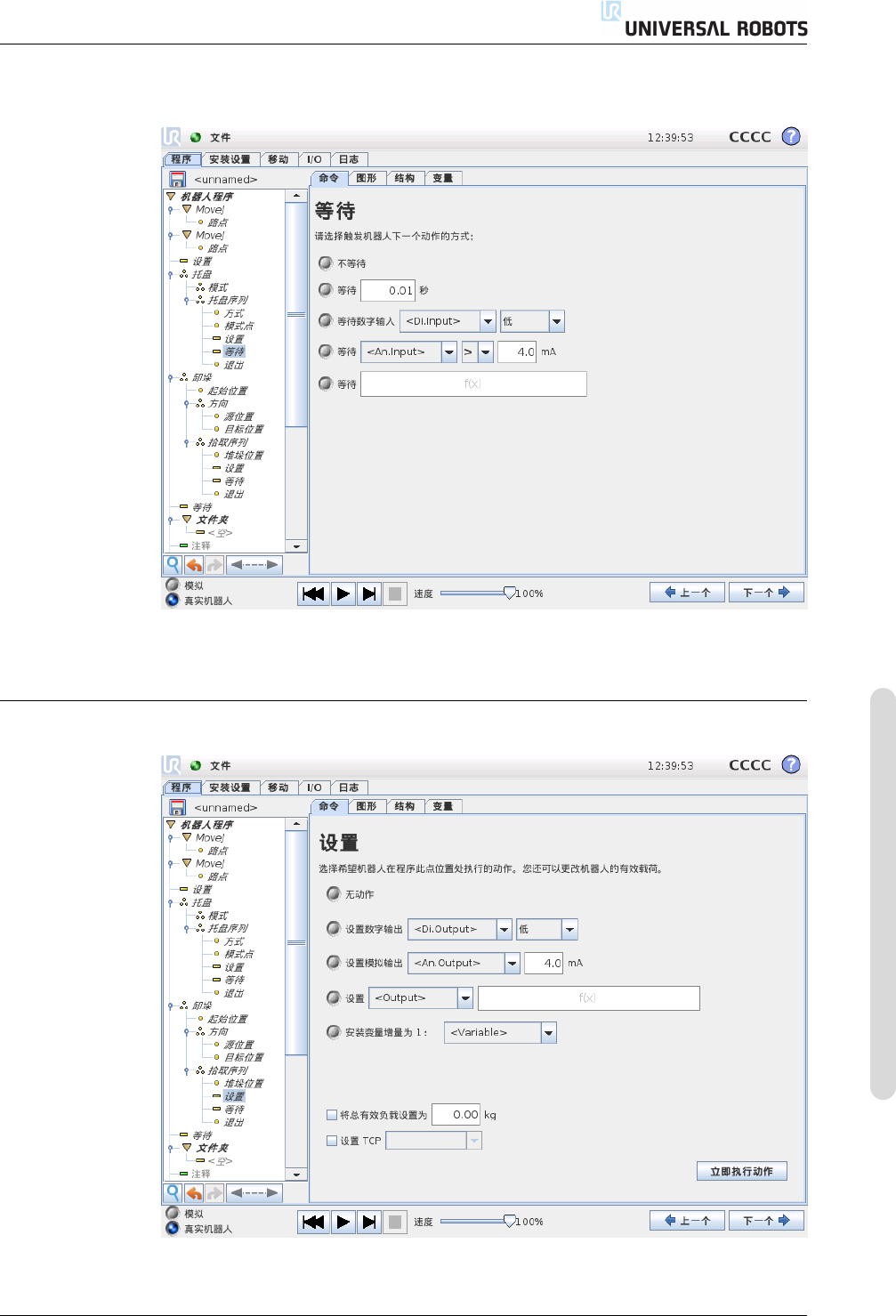
14.9 命令:等待
14.9 命令:等待
“等待” 指定的时间或等待 I/O 信号。
14.10 命令:设置
将数字输出或模拟输出设置为给定值。
版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
II-65 CB3
14.11 命令:弹出窗口
也可用于设置机器人手臂的有效负载,例如设置通过此动作抓取的工件的重量。如
果工具处承受的重量与预期重量不同,可能需要调整重量,以避免触发机器人意外
保护性停止。
激活的 TCP 也可以使用 “设置” 命令修改。只需勾选复选框,并从菜单中选择一个
TCP 偏移。如果在写入程序时为特定运动指定的激活 TCP 已知,那么请在 “移动”
卡上使用该 TCP 选择(请参见 14.5)。关于配置指定 TCP 的更多信息,请参见
13.6。
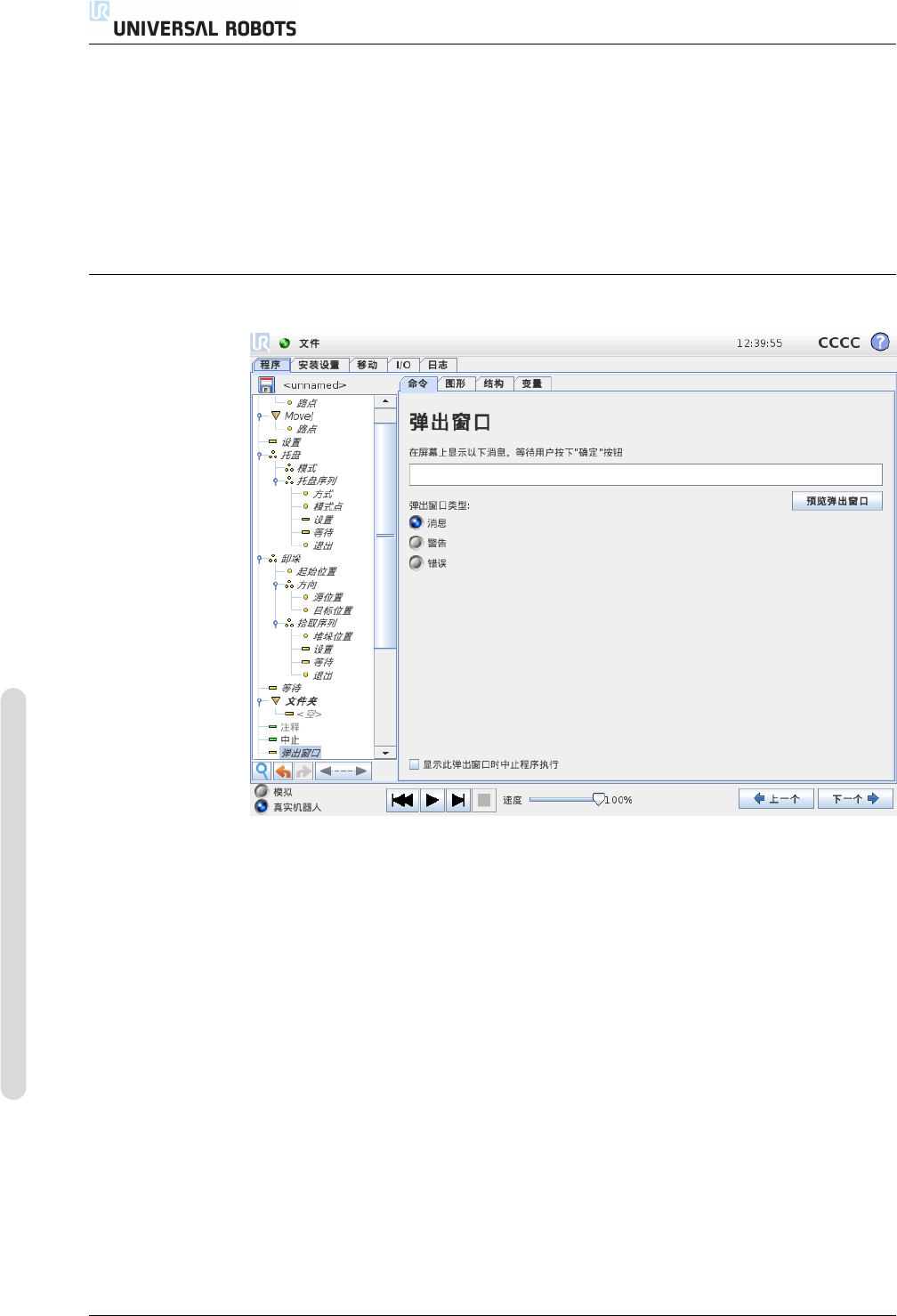
14.11 命令:弹出窗口
利用 “弹出窗口” 命令可指定一则消息,程序运行至此命令时在屏幕上显示该消息。
您可以选择消息的样式,通过屏幕键盘可输入消息文本。显示弹出窗口后,机器人
将等待用户/操作员按下窗口中的 “确定” 按钮,然后才继续运行程序。如果选中
“中止程序执行”,机器人程序将在弹出此消息窗口时中止运行。
CB3 II-66 版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。