UR5_User_Manual_zh_Global.pdf - 第119页
13.12 安装 → 特征 • E6 从设备忙 (0x06) :专用信息已与编程命令一起发送至远程 MODBUS 设备, 从设备(服务器)现在无法响应。 显示高级选项 此复选框可显示 / 隐藏每个信号对应的高级选项。 高级选项 • 更 新 频 率: 此 菜 单 可 用 于 更改 信 号 的 更 新 频 率。 更 新 频 率 是 指 向 远 程 MOD- BUS 设备发送请求来读取或写入信号值的请求频率。 • 从设备 地址: 此文本 字段…
13.11 安装 → MODBUS 客户端 I/O 设置
设置信号类型
使用此下拉菜单可选择信号类型。可用类型包括:
• 数字输入:数字输入信号是一位长度的信号,可从信号地址域中指定线圈上的
MODBUS 设备读取。使用功能代码 0x02(读取离散输入)。
• 数字输出:数字输出信号(线圈)是一位长度的信号,可设置为高电平或低电
平。在用户已设置此输出的值之前,将从远程 MODBUS 设备读取输出值。这
意味着将使用功能代码 0x01(读取线圈)。当通过机器人程序设置或使用 “设
置信号值” 按钮设置输出之后,将使用功能代码 0x05(写入单线圈)。
• 寄存器输入:寄存器输入信号是从地址域中指定的地址读取的 16 位长度信
号。使用功能代码 0x04(读取输入寄存器)。
• 寄存器输出:寄存器输出信号是 16 位长度信号,可由用户自行设置。在用户
已设置寄存器的值之前,将从远程 MODBUS 设备读取寄存器值。这意味着将
使用功能代码 0x03(读取保持寄存器)。当通过机器人程序或在 “设置信号值”
字段中指定信号值来设置信号之后,将使用功能代码 0x06(写入单寄存器)来
设置远程 MODBUS 设备的值。
设置信号地址
此字段显示远程 MODBUS 服务器上的地址。可使用屏幕小键盘选择不同地址。有
效地址取决于制造商和远程 MODBUS 设备的配置。
设置信号名称
用户可以使用屏幕键盘为信号指定名称。当信号在程序中使用时会用到信号名称。
信号值
此处显示信号的当前值。对于寄存器信号,信号值以无符号整数表示。对于输出信
号,可以使用按钮设置所需的信号值。同样,对于寄存器输出信号,所提供的要写
入设备的信号值也必须是无符号整数。
信号连接状态
此图标显示是否可正确读取/写入信号(绿色)、设备是否做出意外响应或是否无法
检测到设备(灰色)。如果收到 MODBUS 异常响应,则显示响应代码。MODBUS-
TCP 异常响应为:
• E1 非法功能 (0x01):询问所收到的功能代码是服务器(或从设备)不允许的
动作。
• E2 非法数据地址 (0x02):询问所收到的功能代码是服务器(或从设备)不允
许的动作,检查输入的信号地址是否对应远程 MODBUS 服务器的设置。
• E3 非法数据值 (0x03):询问所包含的值是服务器(或从设备)不允许的动作,
检查输入的信号值对于远程 MODBUS 服务器上的指定地址是否有效。
• E4 从设备故障 (0x04):服务器(或从设备)在尝试执行所请求的动作时发生
不可恢复的错误。
• E5 应答 (0x05):专用信息已与编程命令一起发送至远程 MODBUS 设备。
CB3 II-44 版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
13.12 安装 → 特征
• E6 从设备忙 (0x06):专用信息已与编程命令一起发送至远程 MODBUS 设备,
从设备(服务器)现在无法响应。
显示高级选项
此复选框可显示/隐藏每个信号对应的高级选项。
高级选项
• 更新频率:此菜单可用于更改信号的更新频率。更新频率是指向远程 MOD-
BUS 设备发送请求来读取或写入信号值的请求频率。
• 从设备地址:此文本字段可用于为与特定信号对应的请求设置具体的从设备地
址。该值必须在 0-255 范围内(包括 0 和 255),默认值为 255。若要更改此
值,建议您首先查阅远程 MODBUS 设备手册,验证从设备地址更改后的功能
正常。
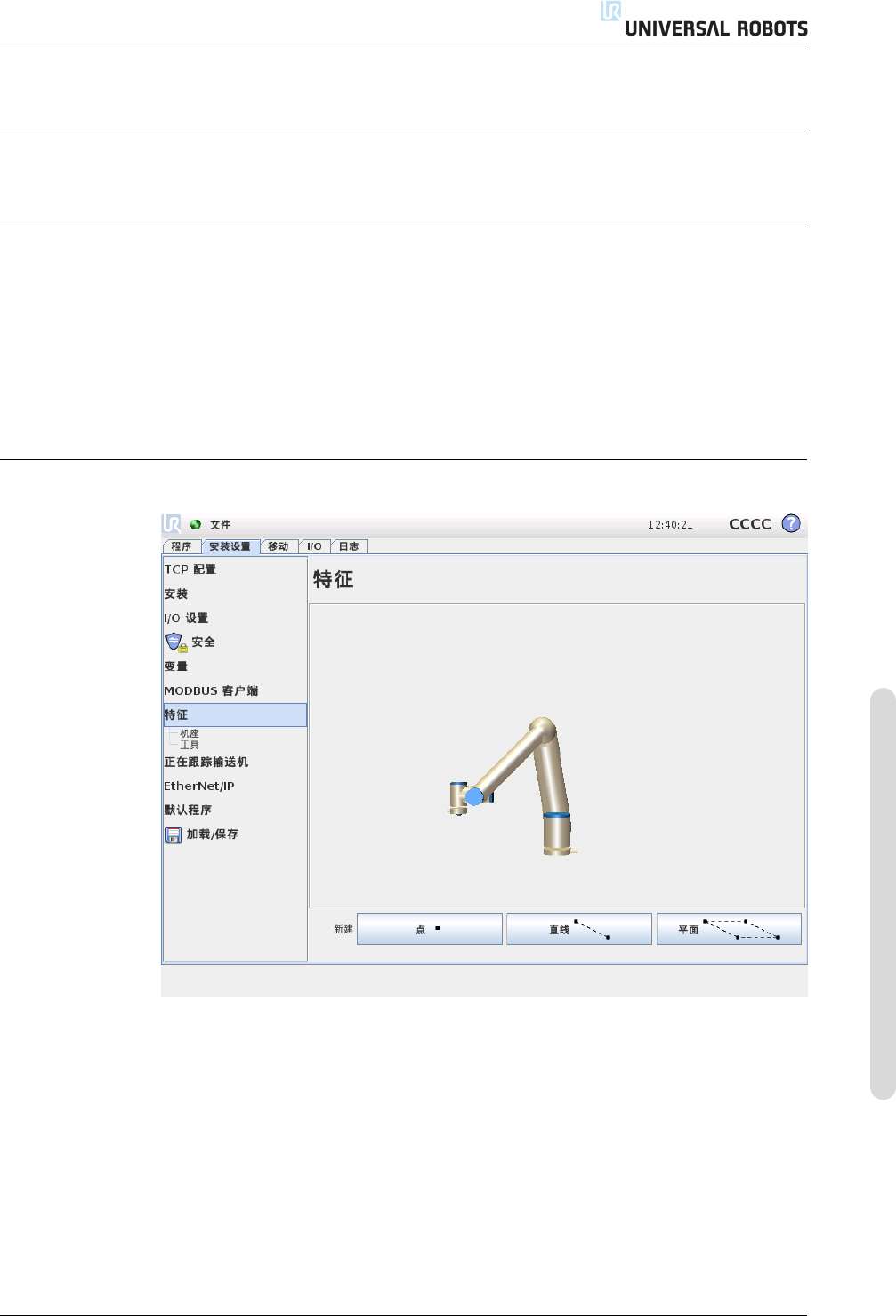
13.12 安装 → 特征
购买工业机器人的客户通常都希望能够相对于机器人手臂周边各种物体和边界(例
如机器、工件或坯料、夹具、输送机、托盘或观察系统),来控制或操作机器人手臂
以及对机器人手臂进行编程。传统的实现方式是定义 “框架”(坐标系),将机器人
手臂内部坐标系(机座坐标系)和相关对象的坐标系相关联。机器人的内部坐标可
根据机器人的 “工具坐标” 和 “机座坐标” 来确定。
采用此类框架有一个问题:人员需要具备一定的数学知识才能定义此类坐标系,而
且即使是非常擅长机器人编程和安装的人员,要定义此类坐标系也需要花费大量时
间。该任务通常涉及 4x4 矩阵计算。特别是,对于缺乏必要经验的人员而言,方位
的表示过程非常复杂,很难理解。
客户会提出一些常见问题,例如:
版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
II-45 CB3
13.12 安装 → 特征
• 是否 可 以将机器 人向远离 我的数控(computerised numerically controlled,
CNC)机床方向移动 4 cm?
• 是否可以将机器人工具旋转至与机床呈 45 度角?
• 我们是否可以让机器人手臂携带工件垂直向下运动,然后松开工件,再垂直向
上运动?
对于想要在生产车间各种工位上使用机器人手臂的一般客户而言,此种问题的意义
不言而喻,因此在告知客户此类相关问题没有一蹴而就的简单答案时,客户会显得
懊恼和难以理解。此情况的出现有若干复杂原因,针对这些问题,Universal Robots
开发了一些独特而又简单的方法,让客户可以指定各对象相对于机器人手臂的位
置。因此,客户只需执行几个步骤,即可完美解决上述问题。
重命名
使用此按钮可对特征进行重命名。
删除
使用此按钮可删除所选特征及存在的任何子特征。
显示坐标轴
选择是否在 3D 视角中显示所选特征的坐标轴。该选择适用于此屏幕和 “移动” 屏
幕。
可唤醒
选择所选特征是否将可唤醒。这确定该特征是否将显示在 “移动” 屏幕的特征菜单
中。
变量
选择所选特征是否可用作变量。如果选中此选项,编辑机器人程序时,将可使用以
特征名称后面加 “ var” 命名的变量,而且可以在程序中为此变量分配一个新值,然
后可用其控制依赖于特征值的路点。
设置或更改位置
使用此按钮可设置或更改所选特征。单击按钮后将显示 “移动” 屏幕,可在其中设
置特征的新位置。
将机器人移至特征位置
按此按钮可将机器人手臂移向所选特征。移动结束后,特征的坐标系和 TCP 的坐
标系将重合,差异是 x 轴有 180 度的旋转。
添加点
按此按钮可在安装设置中添加点特征。点特征的位置由 TCP 在该点的位置来定
义。点特征的方向与 TCP 方向相同,只不过特征坐标系是绕其 x 轴旋转 180 度。
这使得点特征的 z 轴与该点 TCP 的 z 轴相反。
CB3 II-46 版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。