UR5_User_Manual_zh_Global.pdf - 第123页
13.14 安装设置 → 默认程序 字段 每米勾号数量 表示当输送机移动一米时编码器生成的勾号的数量。 每米勾号数量 = 编码器每转的勾数 2 π · 编码器圆盘半径 [m] (13.1) 圆形输送机 当跟 踪 圆形 输 送 机时, 必 须定 义 输送 机 (圆)的 中 心点。 每转勾 号 数量 必 须是 当 输 送机旋转一整圈时编码器生成的勾号数量。 13.14 安装设置 → 默认程序 该屏 幕包含 自动 加载 设置、启 动默 认程序…
13.13 输送机跟踪设置
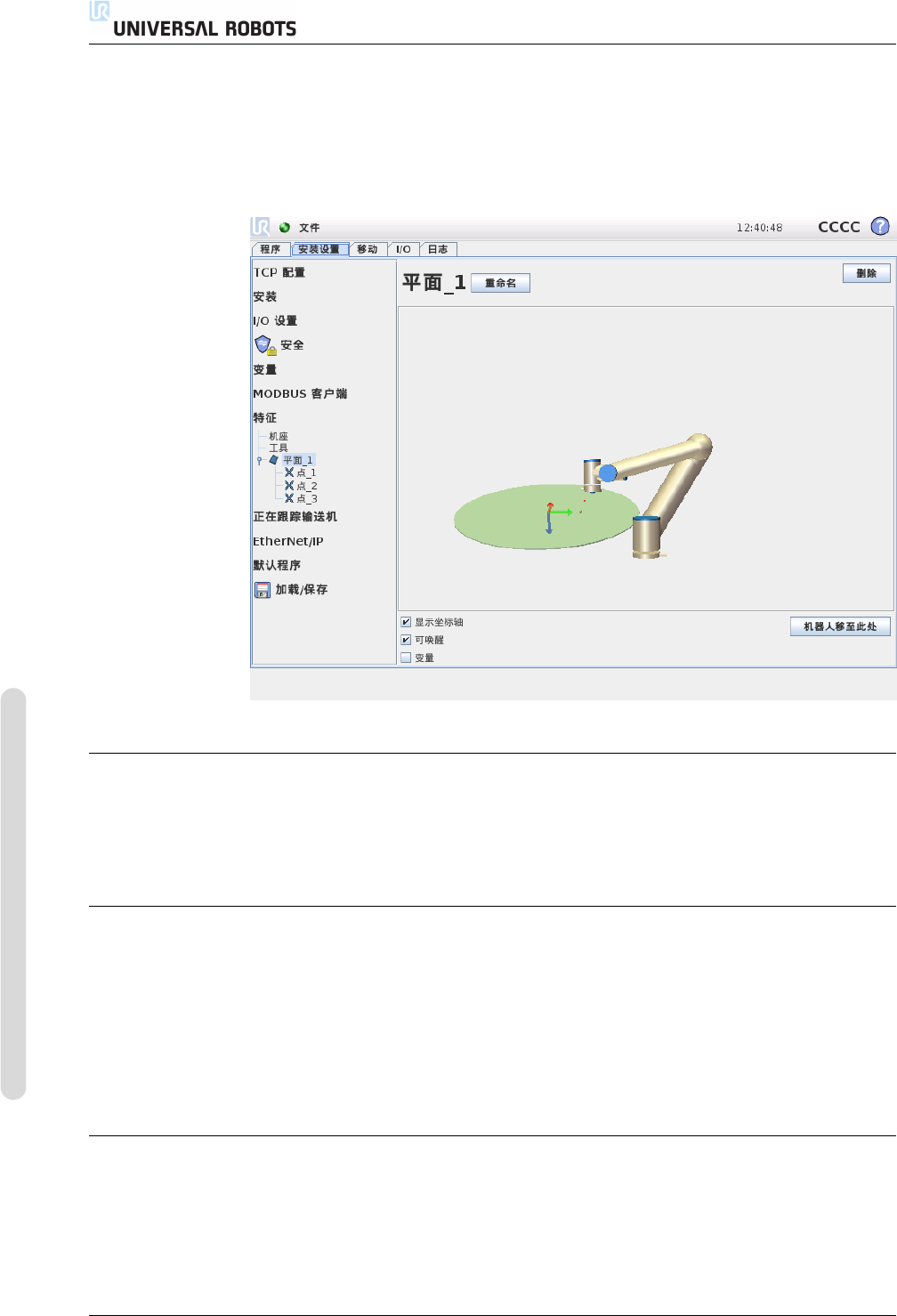
添加平面
按此按钮可在安装设置中添加平面特征。平面由三个子点特征来定义。坐标系的位
置与第一个子点的位置相同。z 轴为平面法线,从第一个点指向第二个点的轴为 y
轴。z 轴的正方向设置要使平面的 z 轴与第一点的 z 轴之间夹角小于 180 度。
13.13 输送机跟踪设置
当使用输送机时,可对机器人进行配置以跟踪它的移动。 “输送机跟踪设置” 提供
配置机器人的选项,可将其配置为与绝对和增量式编码器以及线性和圆形输送机一
起工作。
输送机参数
增量式编码器可连接数字输入端 0 ~ 3。数字信号的解码以 40kHz 的频率运行。利
用正交编码器(要求两个输入端),机器人可以判断速度以及输送机的方向。如果输
送机的方向恒定,可利用单个输入端来检测上升、下降或上升和下降边缘以确定输送
机的速度。
当通过 MODBUS 信号连接时,绝对编码器可以使用。这需要在 13.11中预先配置一
个数字式 MODBUS 输入寄存器。
线性输送机
当选择了线性输送机时,必须配置直线特征以确定输送机的方向。直线特征应与输
送机的方向平行,在定义直线特征的两点之间应有一个较大的距离。建议在示教两
点时将工具牢牢地顶着输送机的侧面放置来配置直线特征。
CB3 II-48 版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
13.14 安装设置 → 默认程序
字段每米勾号数量表示当输送机移动一米时编码器生成的勾号的数量。
每米勾号数量 =
编码器每转的勾数
2π · 编码器圆盘半径 [m]
(13.1)
圆形输送机
当跟踪圆形输送机时,必须定义输送机(圆)的中心点。 每转勾号数量必须是当输
送机旋转一整圈时编码器生成的勾号数量。
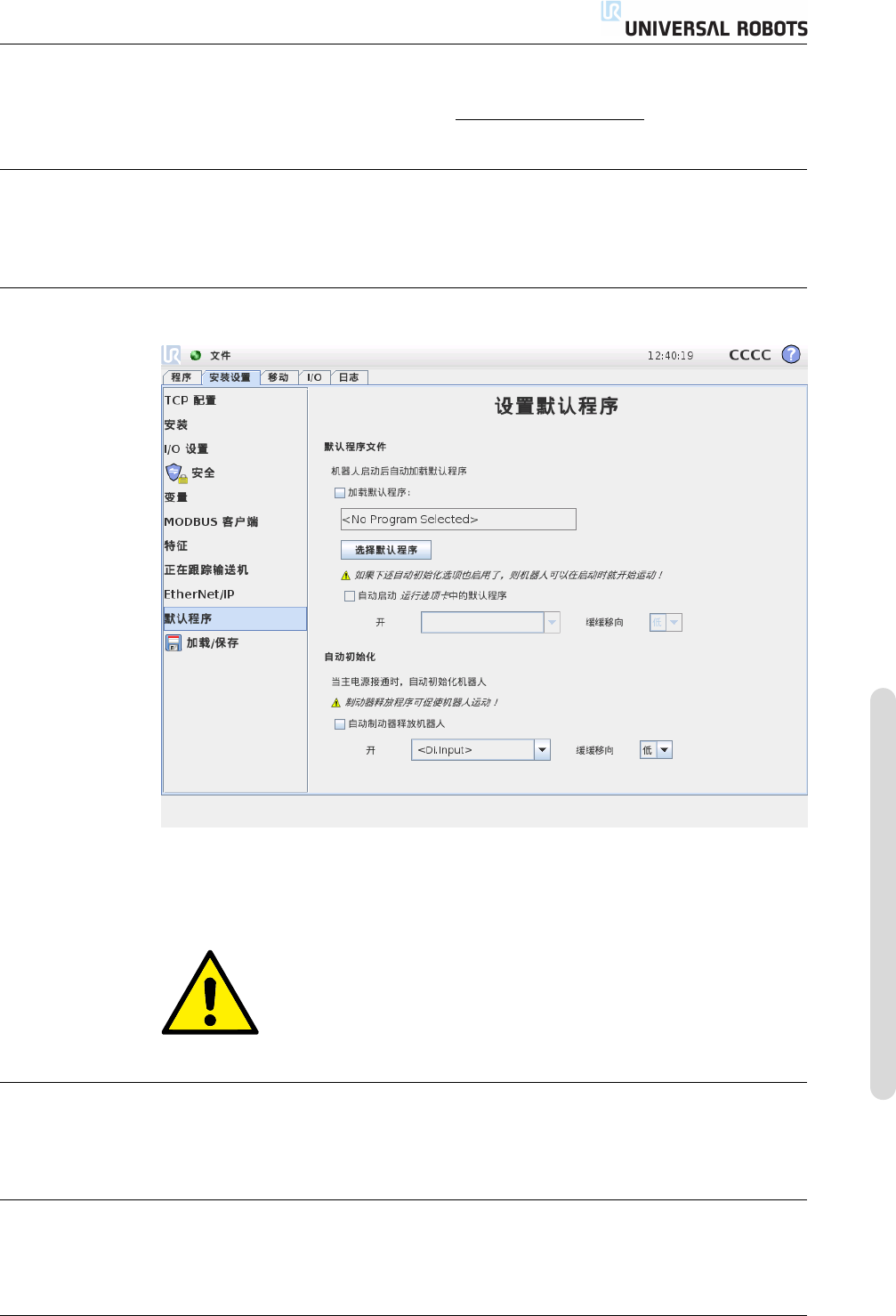
13.14 安装设置 → 默认程序
该屏幕包含自动加载设置、启动默认程序,以及在启动时,自动对机器人手臂进行
初始化。
警告:
如果自动加载、自动启动、自动初始化三个选项都启用,控制箱一
接通电源,机器人就开始运行被选的程序。
13.14.1 加载默认程序
控制箱接通电源后,可选择加载默认程序。此外,当输入运行程序屏幕(请参
阅 11.4)被输入,且不加载任何程序时,默认程序依然会自动加载。
13.14.2 开启默认程序
默认程序可在运行程序屏幕中自动启动。当默认程序被加载,并且特定的外部输入
信号边缘过渡被发现,该程序将自动启动。
版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
II-49 CB3
13.15 日志选项卡
请注意,启动电流输入信号等级未被定义,选择一个与信号等级启动相匹配的过渡
将立即启动程序。此外,离开运行程序屏幕或按压仪表板上的停止按钮将使自动启
动特征失效,直到再次按压运行按钮。
13.14.3 自动初始化
机器人手臂可自动初始化,例如,当控制箱接通电源时。对于特定的外部输入信号
边缘过渡,机器人手臂将完全被初始化,而不考虑可见屏幕。
初始化的最后一步是制动器释放。当机器人释放制动器后,它会移动一小步,并且
发出声音。另外,如果配置的安装角度与基于传感器数据而得到的安装角度不相符,
数据制动器将不能自动释放。在这种情况下,就需要在初始化屏幕(请参阅 11.5)
中对机器人进行手动初始化。
请注意,启动电流输入信号等级未被定义,选择一个与信号等级启动相匹配的过渡
将立即初始化机器人手臂。
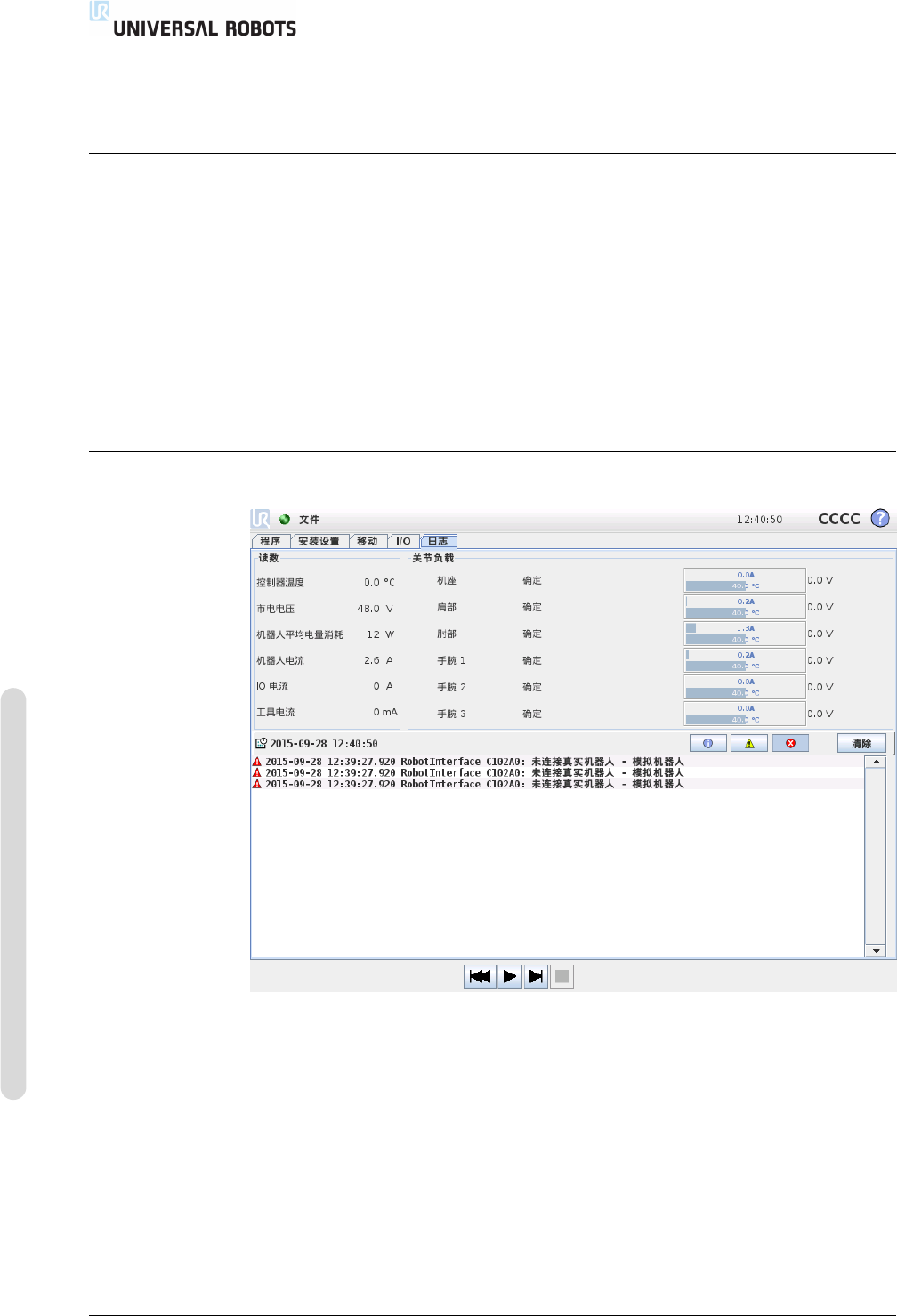
13.15 日志选项卡
机器人状况 屏幕上半部分显示机器人手臂和控制箱状况。左侧显示机器人控制箱
的相关信息,右侧显示机器人每个关节的相关信息。机器人每个关节相关信息包括
电机和电子设备的温度、关节负载以及关节处的电压。
机器人日志 屏幕下半部分显示日志消息。第一列将日志记录的严重性分类。第二
列显示消息到达时间。下一列显示消息发送人。最后一列显示具体消息。消息可以
通过切换按钮(与严重性相对应)进行过滤。上图显示错误会被显示,而信息和警
告消息会被过滤。一些日志消息的设计初衷就是提供更多信息,可以通过选定日志
记录进行访问。
CB3 II-50 版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。