UR5_User_Manual_zh_Global.pdf - 第158页
14.30 结构选项卡 14.30 结构选项卡 使用程序结构选项卡可以插入、移动、复制和移除各种命令。 要插入新命令,请执行以下步骤: 1) 选择现有程序命令。 2) 选择应将新命令插入所选命令的上方还是下方。 3) 按要 插入 的命令 类型 所对 应的 按钮。要 调整 新命 令的具 体内 容,请 转至 命 令 选 项卡。 使用 编辑框 架中 的按 钮可 以移 动 / 复制 / 删除 命令。 如果 命令 含有子 命令 (命令 旁边 有一…
14.28 命令:抑制
14.28 命令:抑制
程序运行时将会直接跳过被抑制的程序行。被抑制的程序行也可以解除抑制。使用
这种方法可以快速更改程序,而且确保不破坏原始内容。
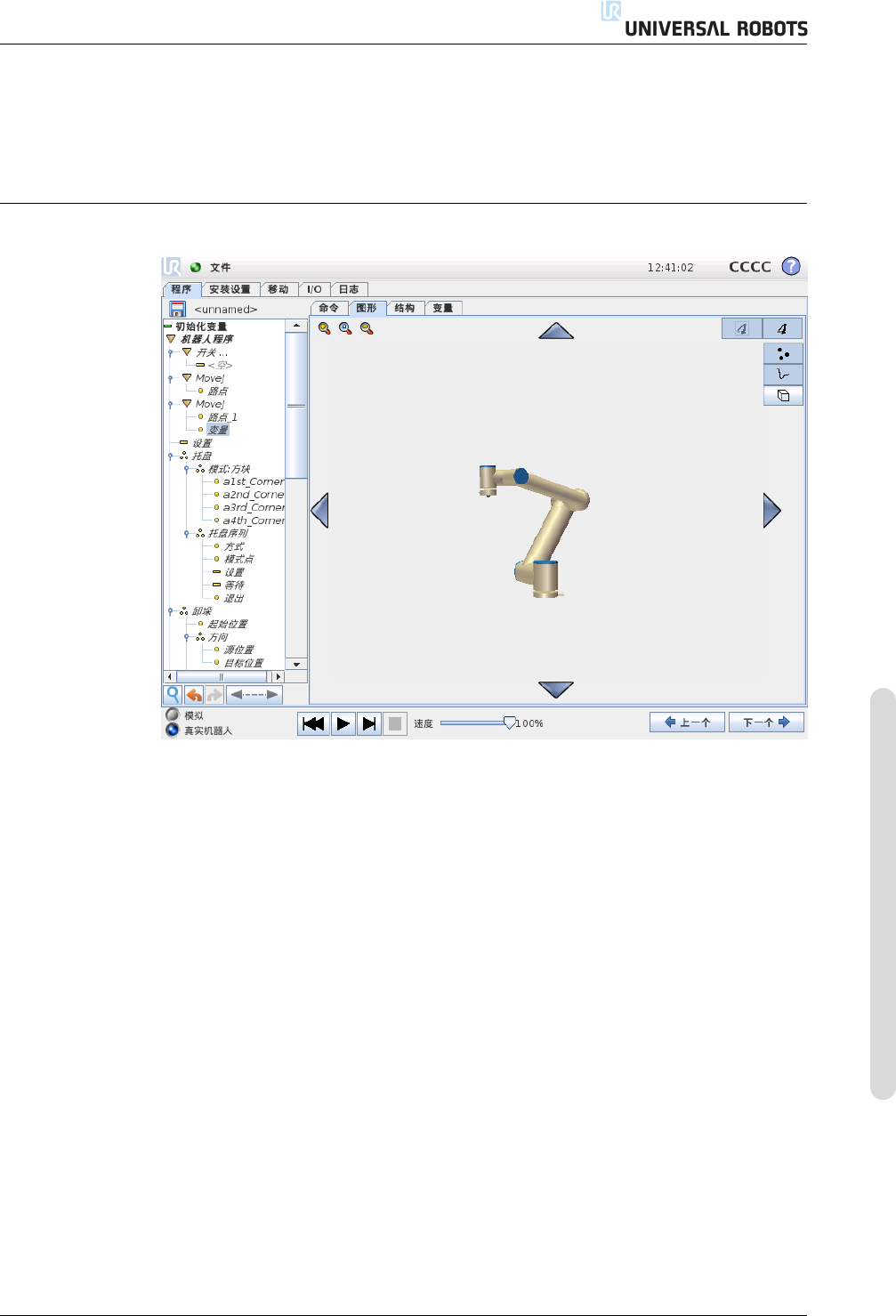
14.29 图形选项卡
当前机器人程序的图形化表示形式。TCP 的路径以 3D 视角显示,运动段显示为黑
色,交融段(运动段之间的过渡)显示为绿色。绿点标明程序中各路点处的 TCP
位置。机器人手臂 3D 图显示机器人手臂的当前位置,机器人手臂 “阴影部分” 显示
机器人手臂到达屏幕左侧所选路点的方式。
如果机器人 TCP 的当前位置距离安全板或触发板很近,又或者机器人工具的方向
接近工具方向边界极限(详见 10.12),则会显示相邻边界的 3D 成像。请注意,如
果机器人在运行程序,边界限制可视化将被禁用。
安全板以黄黑色呈现,带小箭头指示安全板正常,显示安全板上允许放置机器人
TCP 的位置。触发板以蓝绿色呈现,带小箭头指向触发板的一侧,在该侧正常模式
限制处于激活状态(详见 10.6)。工具方向边界极限以锥体呈现,带一个矢量指示
机器人工具的当前方向。锥体内部代表允许的工具方向(矢量)。
目标机器人 TCP 离开极限区域时,3D 成像消失。如果 TCP 违反边界限制或接近
边界极限,则成像会变成红色。
3D 视角可进行缩放和旋转,以更好地显示机器人手臂的运动状态。屏幕右上角的
按钮可以禁用 3D 视角中的各个图形组件。底部按钮可开启/关闭相邻边界限制成
像。
所显示的运动段取决于所选的程序节点。如果选择移动节点,那么所显示的路径是
指由该移动定义的运动。如果选择路点节点,那么屏幕将显示接下来的 ∼ 10 步运
动。
版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
II-83 CB3
14.30 结构选项卡
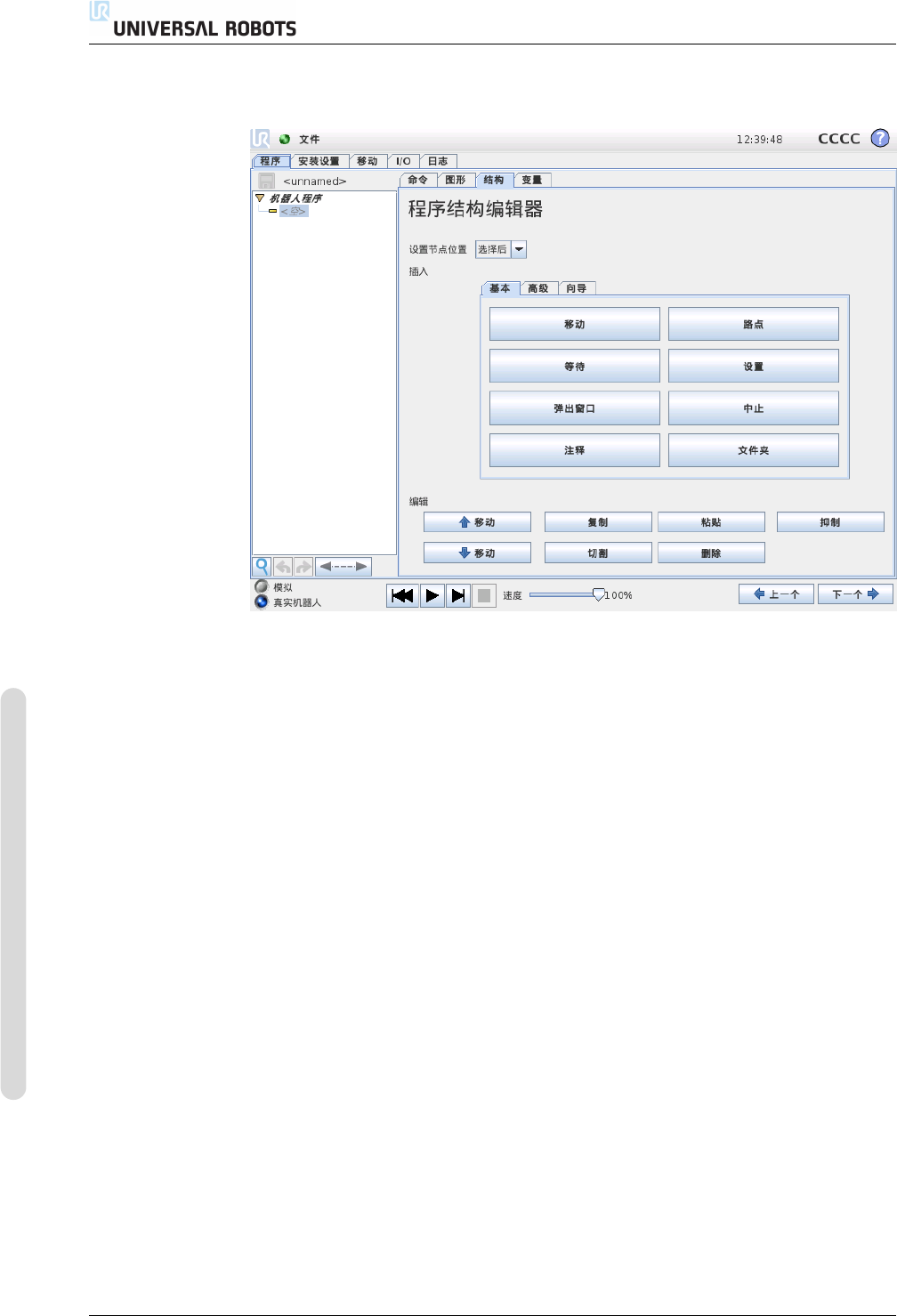
14.30 结构选项卡
使用程序结构选项卡可以插入、移动、复制和移除各种命令。
要插入新命令,请执行以下步骤:
1) 选择现有程序命令。
2) 选择应将新命令插入所选命令的上方还是下方。
3) 按要插入的命令类型所对应的按钮。要调整新命令的具体内容,请转至命令选
项卡。
使用编辑框架中的按钮可以移动/复制/删除命令。如果命令含有子命令(命令旁边
有一个三角形符号),则所有子命令也将随之移动/复制/删除。
并非所有命令都适合放在程序中的所有位置。路点必须包含(但不必直接包含)在
“移动” 命令之中。ElseIf 和 Else 命令必须位于 If 命令之后。通常,随意移动 ElseIf
命令可能会导致出现棘手问题。使用变量之前必须为其赋值。
CB3 II-84 版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
14.31 变量选项卡
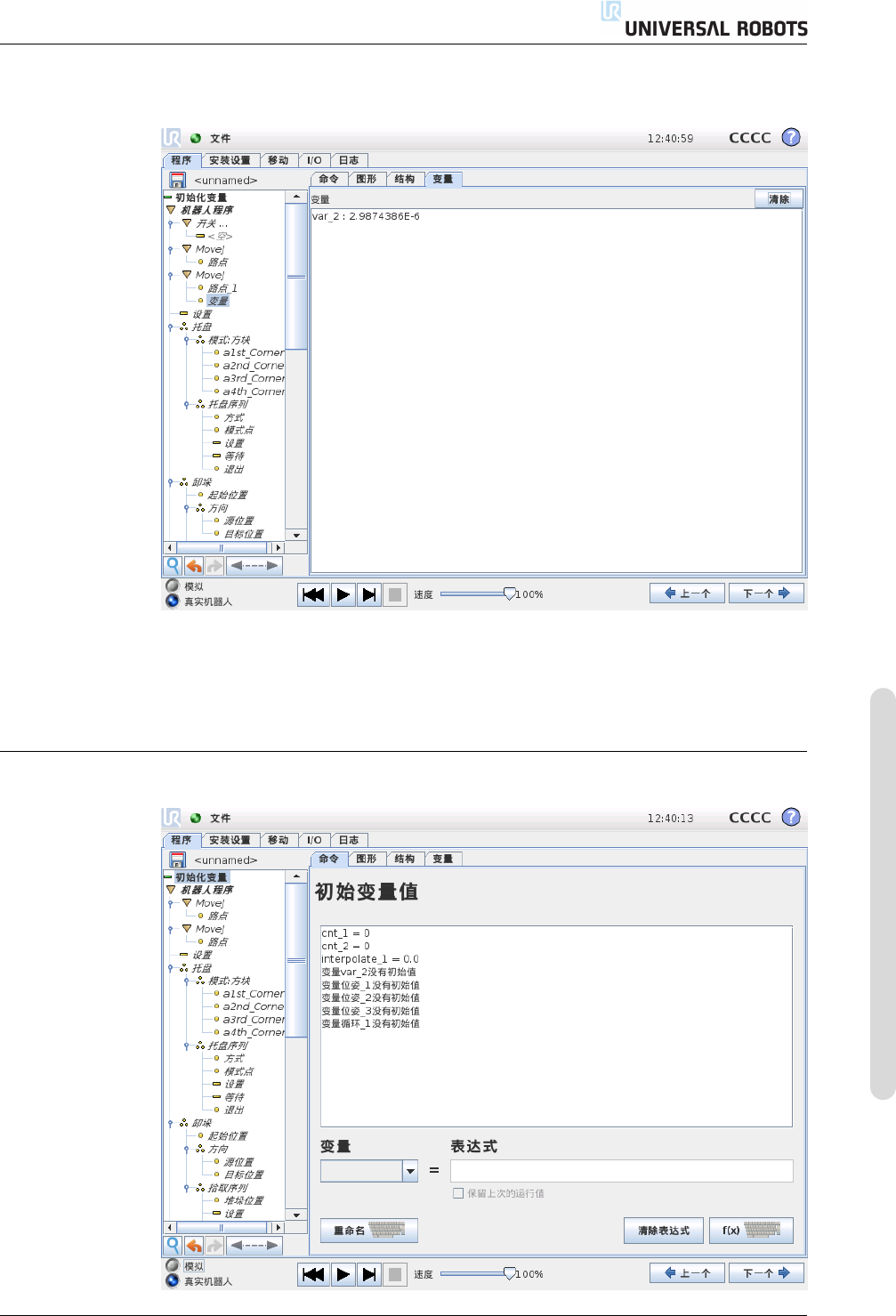
14.31 变量选项卡
“变量” 选项卡显示程序运行中的实时变量值,并在程序运行之间保存传递变量和变
量值列表。它仅在有信息要显示时出现。变量按其名称的字母顺序排列。此屏幕上
的变量名最多以 50 个字符显示,变量值最多以 500 个字符显示。
14.32 命令:变量初始化
版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
II-85 CB3