KE-2050_机器控制参数.pdf - 第75页
R e v 1 . 0 0 机械控制参数 (2) 设定项 输入范围 目 (X 轴、 Y 轴通用 ) № 项目 最小值 最大值 单 位 备考 1 4 参照 (3) 速度区分 速度区分 0 2 Stroke 区分 0 9 参照 (4)Stroke 区 分 超过 160mm 时 发生等速度部分 3 增益变换坐标 4 增益区分 0 1 参照 (5) 增益区分 5 增益数据 算法 PIV1(4) 6 位置循环比例增益 7 位置循环综合增益 8 速…
Rev1.00
机械控制参数
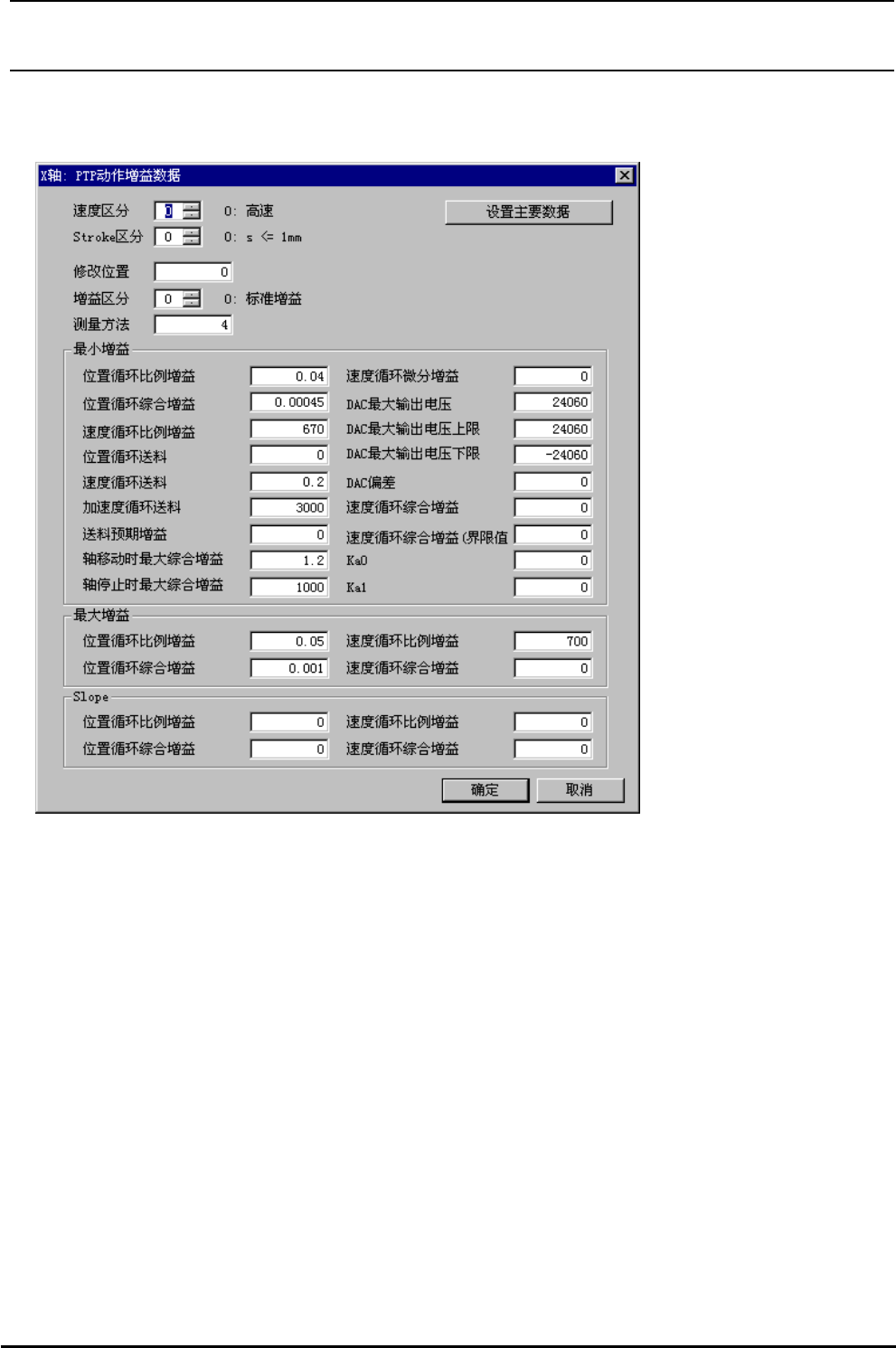
4-2-2 PTP 动作的增益
图 4-2-2 PTP 动作的增益
(1)设定画面的显示方法
菜单∶ X时, [输入]→[XY]→[X]→[PTP]→[增益]
Y时, [输入]→[XY]→[Y]→[PTP]→[增益]
起动∶ X时, [XY]按键→[X]标签→[PTP]标签→[增益数据]按键
Y时, [XY]按键→[Y]标签→[PTP]标签→[增益数据]按键
从主数据设定画面(图 4-2-1)∶ [设置增益数据]按键
注 1) 选择了[设置主要数据]按键之后,主数据设定画面(图 4-2-1)被显示出来。此时,在现在显示的速
度区分、Stroke 区分上有关主数据被显示出来。
注 2) 从主数据设定画面(图 4-2-1)显示出本画面之后,不显示[设定主要数据]按键。此时,使用[OK]按
键或[取消]按键结束本画面之后,返回主数据设定画面。
4-29
Rev1.00
机械控制参数
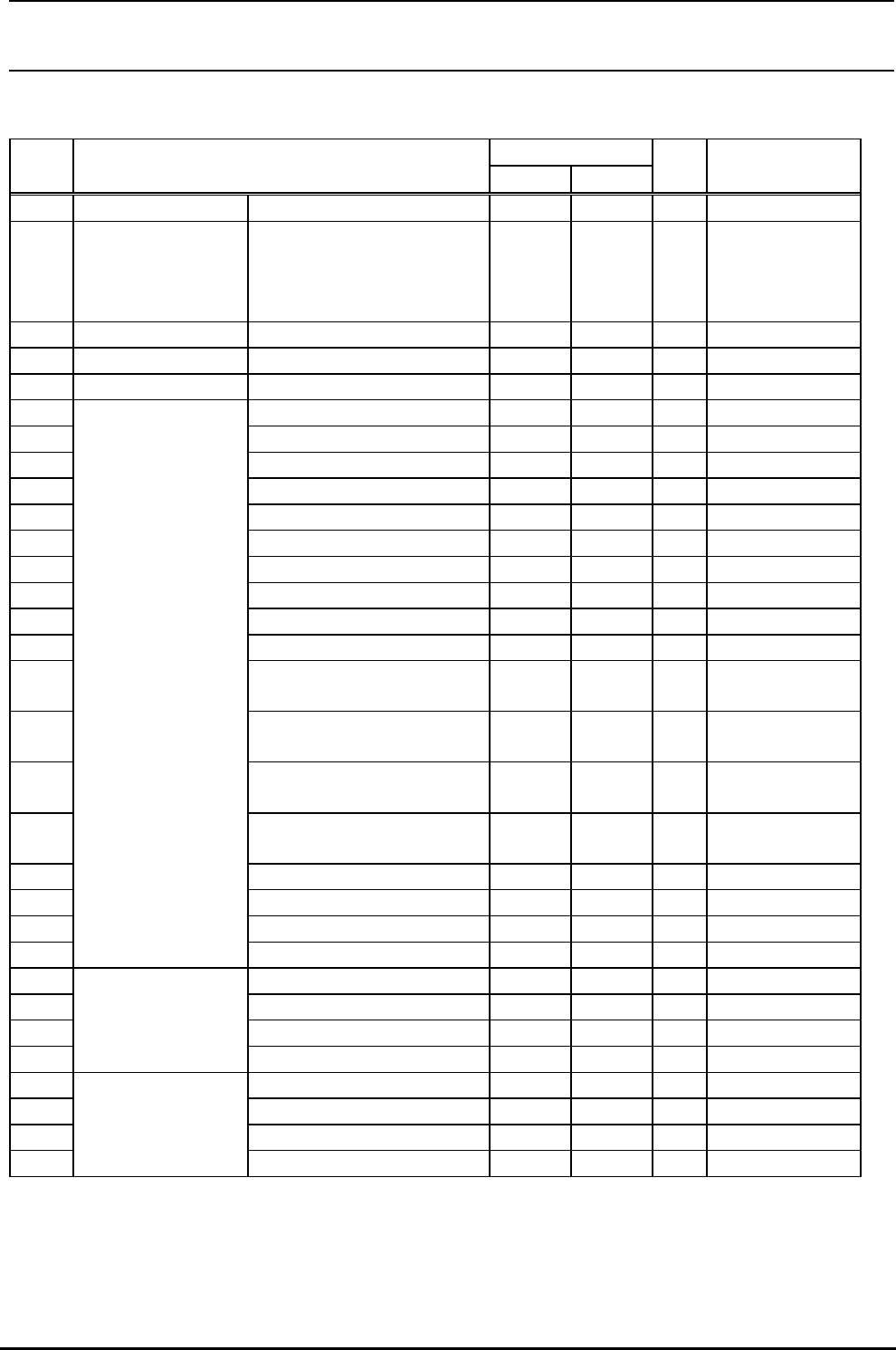
(2)设定项
输入范围
目(X轴、Y轴通用)
№ 项目
最小值 最大值
单
位
备考
1 4 参照(3)速度区分 速度区分 0
2 Stroke 区分 0 9
参照(4)Stroke 区
分
超过 160mm 时
发生等速度部分
3 增益变换坐标
4 增益区分 0 1 参照(5)增益区分
5 增益数据 算法 PIV1(4)
6 位置循环比例增益
7 位置循环综合增益
8 速度循环比例增益
9 位置循环送料增益
10 速度循环送料增益
11 加速度循环送料增益
12 送料预期增益
13 轴动作时最大综合增益
14 轴停止时最大综合增益
15 速度循环微分增益
16
DAC 最大输出电压
(最大转矩指令)
17
最大出力電圧上限
(トルク指令上限)
最小增益
(基本增益)
DAC の
18
DAC 最大输出电压下限
限) (转矩指令下
19
DAC 输出偏差
) (转矩指令偏差
20 速度循环综合增益
21 速度循环综合增益界限
22 Ka0
23 Ka1
24 位置循环比例增益
25 益 位置循环综合增
26 益 速度循环比例增
27
大增
使用
上限
循环综合增益
最 益
( PIV1 时的增
益 值)
速度
28 循环比例增益 位置
29 置循环综合增益 位
30 度循环比例增益 速
31
对使用
置偏
Slope
( PIV1 时的
位 差的乘数)
速度循环综合增益
4-30
Rev1.00
机械控制参数
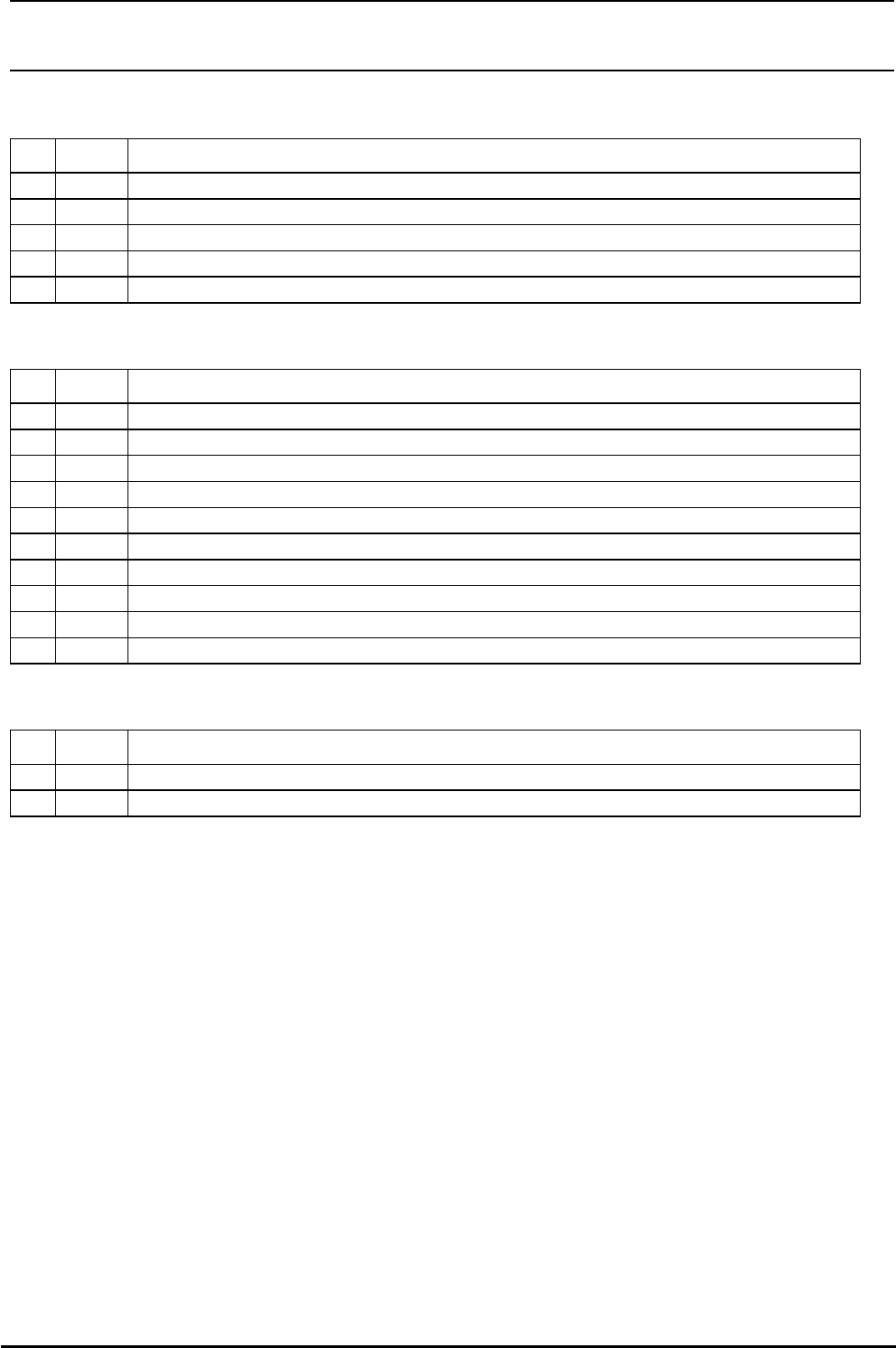
(3)速度
内 容
类别
№ 类别
1 高速 0
2 1 中速
3 2 低速
4 3 超低速
5 4 超高速
(4)行程类别
№ 类别 内 容
1 0 s <= 1mm
2 1 1mm < s <= 2mm
3 2 2mm < s <= 4mm
4 3 4mm < s <= 10mm
5 4 10mm < s <= 20mm
6 5 20mm < s <= 40mm
7 6 40mm < s <= 70mm
8 7 70mm < s <= 110mm
9 8 110mm < s <= 160mm
10 9 预备
(5)增益类别
№ 类别 内 容
1 0 基本增益
2 1 扩展增益
4-31