KE-2050_机器控制参数.pdf - 第86页
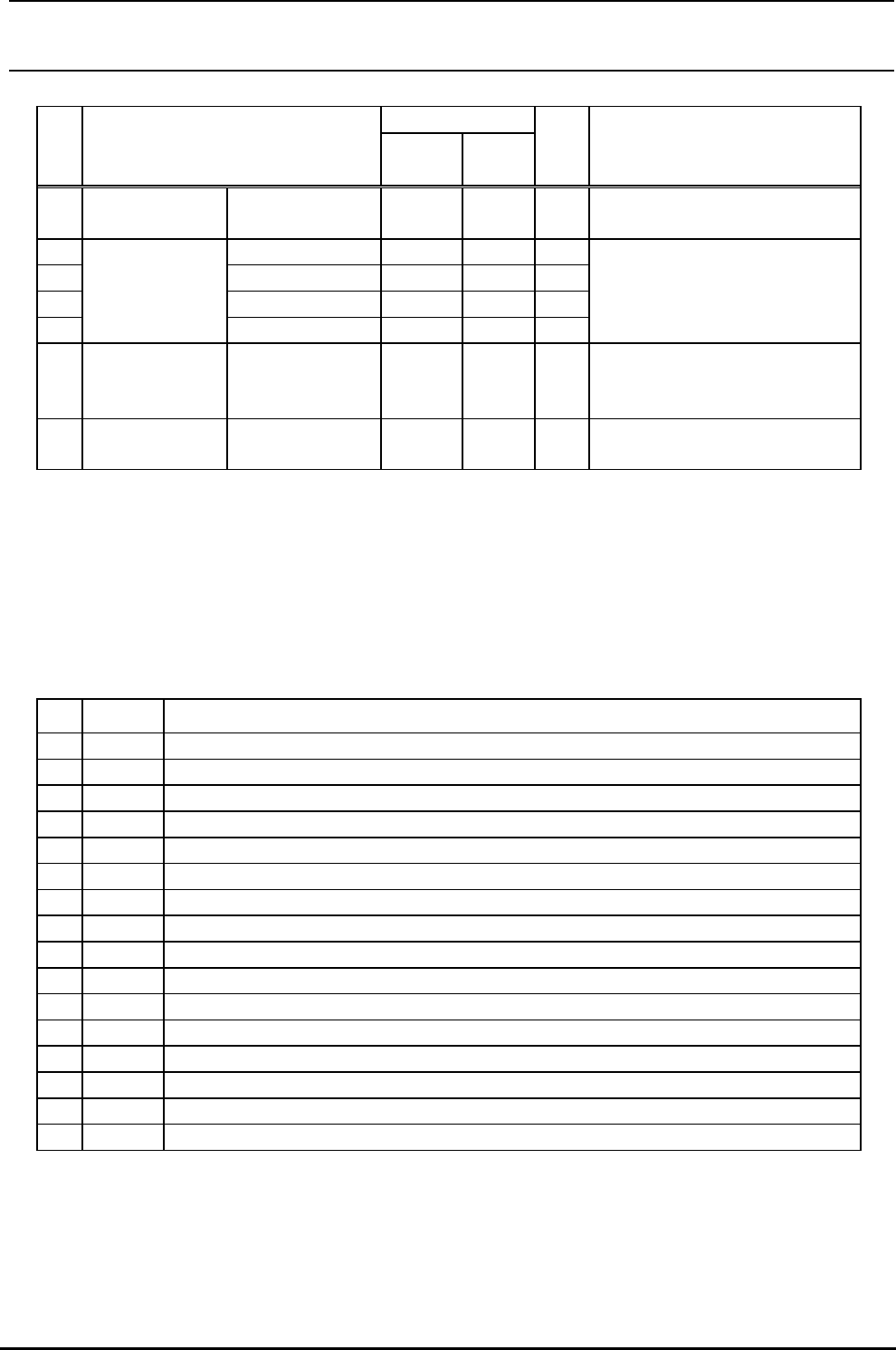
R e v 1 . 0 0 机械控制参数 4-3-2 AWC 马达 图 4-3-2 AWC 马达 (1) 设定画面的显示方法 菜单∶ [ 输入 ]→[ 传送 ]→[AWC 马达 ] 起动∶ [ 传送 ] 按键 输入范围 →[AWC 马达 ] 按键 ( 2 ) 设定项目 № 项目 最小值 最大值 单 位 备考 1 区分 0 9 参照 (3) 区分 2 速度 (pps) pps 3 加速度 ) 2 (pps2 pps 4 AWC 马达 ( …
Rev1.00
机械控制参数
输入范围
№ 项目
最小值
最大
值
单
位
备考
4 ms
控制方式选择2的时间固定时
设定
移动时间
5 速度(pps) pps
6 加速度(pps2) pps
2
7 减速度(pps2) pps
2
支撑台
(速度表)
8
反动冲击率(%) %
控制方式选择3的台形驱动时,
此速度表为上限值
9 分解能 脉冲
0.00
1μ
m
10 陶瓷基板尺寸
基板尺寸不到该值时,请使用
时 用的基板 。
mm
钳夹 陶瓷 推入量
注 1) 在区分上选择了 0∼11 之后,在变换行程上可以设定最多 5 级的控制参数。变换行程的1
5,2为 50,3为 0 为S≦5,第 2 级为 5<S≦50,第 3 级 0 S。
2) 在区分上选择了 1 可以编辑脉冲 和画面 列的速 p 、加速度(pps2)、
(pps2)、反动冲击率
(3 别
№ 类别 内 容
为 时,第 1 级 为 5 <
注 2∼16 之后,仅 1 度(p s)
减速度 (%)。
)类
1 0 上升(高速)销基准时
2 1 上升(高速)外形基准时
3 2 时 下降(高速)销基准
4 降(高速)外形基准时 3 下
5 4 上升(中速)销基准时
6 5 上升(中速)外形基准时
7 6 下降(中速)销基准时
8 7 下降(中速)外形基准时
9 8 上升(低速)销基准时
10 9 上升(低速)外形基准时
11 10 下降(低速)销基准时
12 11 下降(低速)外形基准时
13 12 返回原点时 HOME 检索(高速 JOG)
14 13 返回原点时检索零相(低速 JOG)
15 14 演示(STEP 动作)
16 15∼16 预备
4-40
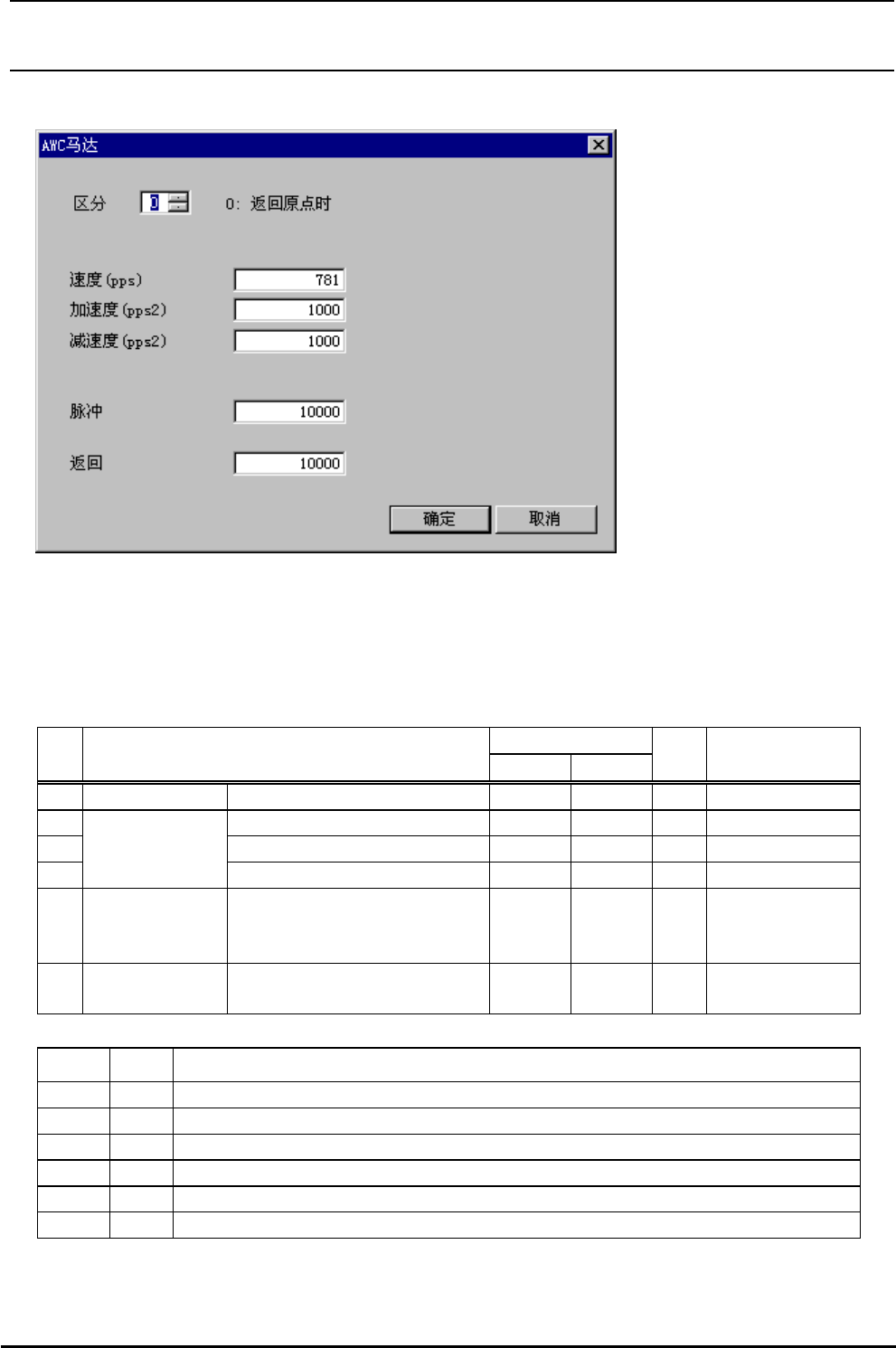
Rev1.00
机械控制参数
4-3-2 AWC 马达
图 4-3-2 AWC 马达
(1)设定画面的显示方法
菜单∶ [输入]→[传送]→[AWC 马达]
起动∶ [传送]按键
输入范围
→[AWC 马达]按键
(2)设定项目
№ 项目
最小值 最大值
单
位
备考
1 区分 0 9 参照(3)区分
2 速度(pps) pps
3 加速度 )
2
(pps2 pps
4
AWC 马达
(驱动方式)
减速度(pps2)
2
pps
5 分解能 脉冲
0.00
1μ
m
期 0000
(10μm)
初 值:1
6 返
0.1
μm
初期值:10000
mm
回量(定位精度用)
(1 )
(3)类别
№ 类别 内 容
1 0 返回原点时
2 作1 JOG 动 时
3 高速 PTP 2
4 P3 中速 PT
5 P 4 低速 PT
6 5∼9 预备
4-41
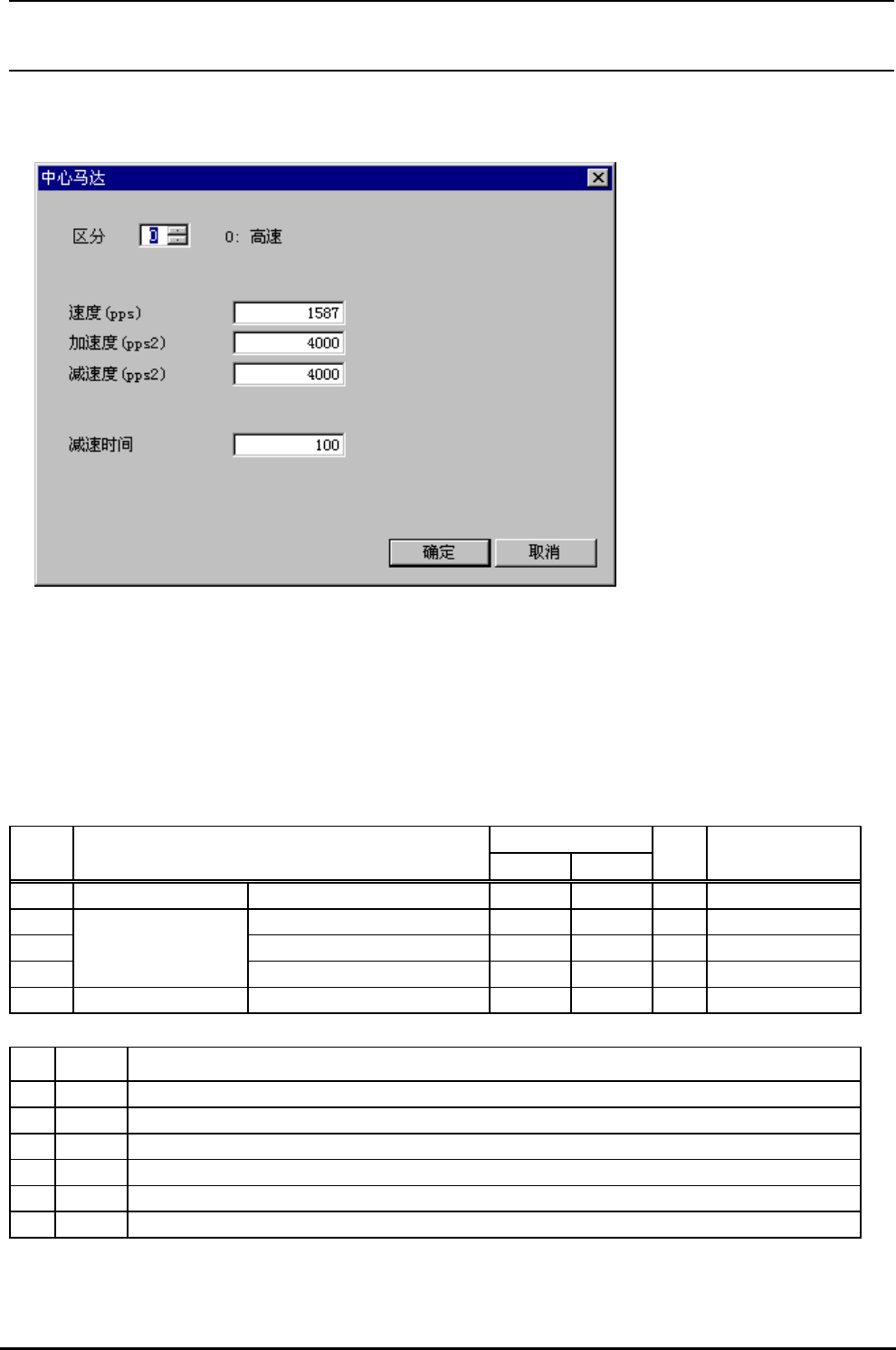
Rev1.00
机械控制参数
4-3-3 中心马达
图 4-3-3 中心马达
(1)设定画面的显示方法
菜单∶ [输入]→[传送]→[中心马达]
起动∶ [传送]按键→[中心马达]按键
(2)设定项目
输入范围
№ 项目
最小值 最大值
单
位
备考
1 区分 0 9 参照(3)区分
2 速度(pps) pps
3 加速度(pps2) pps
2
4
中心马达
(驱动方式)
减速度(pps2) pps
2
5 减速时间 ms 1∼1000
(3)类别
№ 类别 内 容
1 0 高速(约 400 mm/s)
2 1 低速(约 300 mm/s)
3 2 预备送料(约 56 mm/s)
4 3 预备送料(超低速)(约 14 mm/s)
5 4 低速(约 150 mm/s)
6 5∼9 预备
4-42