SI-F209_Manual(J)JPG_rev1.pdf - 第129页
ソフトウェアリミットセットアップ HLF-20317-01 ソフトウェアリミットセットアップ SHEET 7/9 4. 相対移動 ボタンをクリックします。 5. 相対移動の Y 軸 ボタンをクリックします。 6. Y 軸の数値入力欄 に「 776.000 」を入力して ST ART ボタンを押します。 Y 軸がカセット 101 の位置から、プラス 776.0 mm 相対移動します。 7. ジョグ移動 ボタンをクリックします。 8. 低速…
ソフトウェアリミットセットアップ
HLF-20317-01
ソフトウェアリミットセットアップ
SHEET
6/9
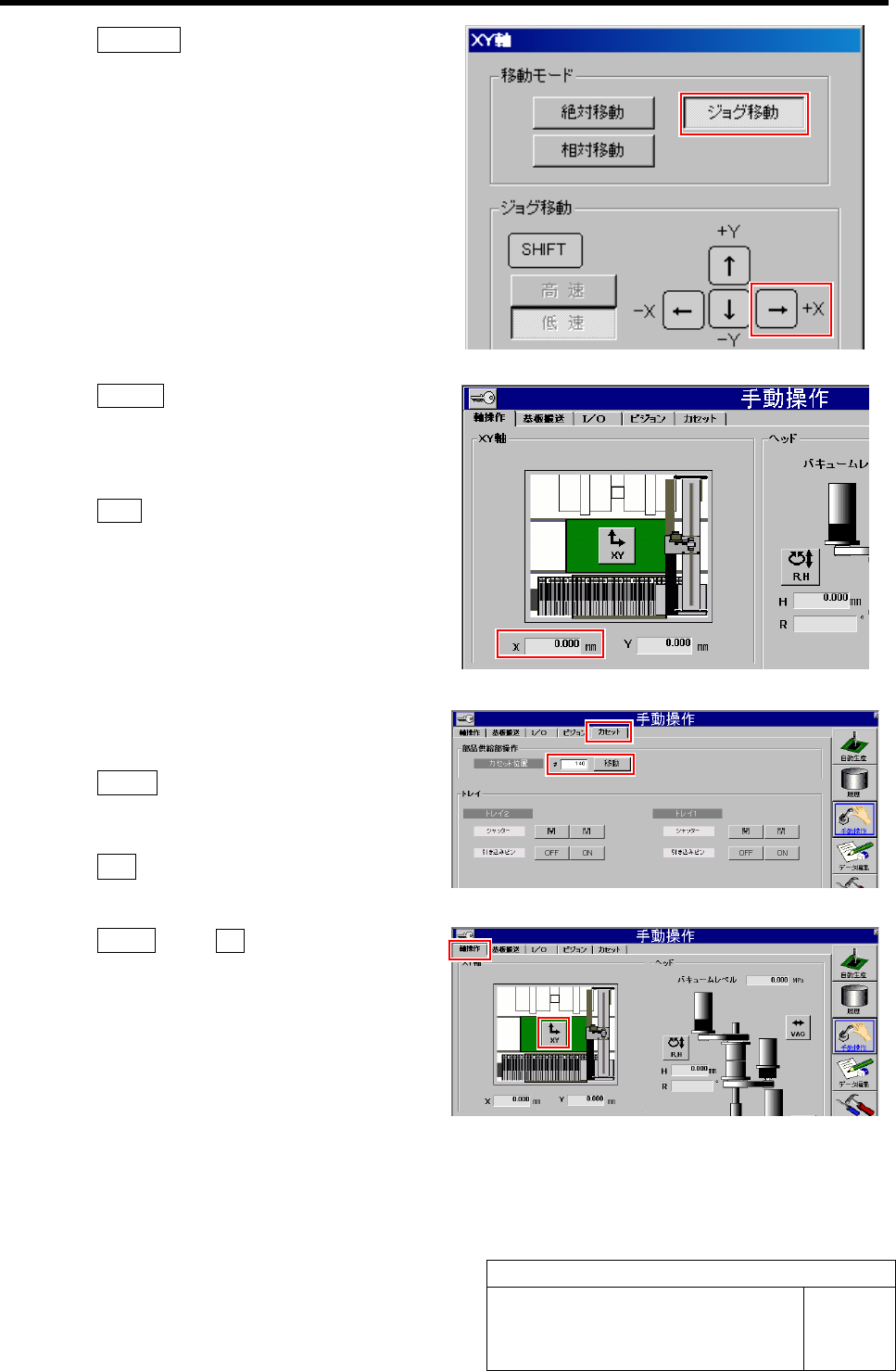
5. ジョグ移動 ボタンをクリックします。
6. 低速ジョグ移動で、右カーソルを 1 回ずつ
クリックして X 軸をプラス方向に移動させま
す。
オーバートラベル位置まで移動すると、アラーム
が表示されます。
7. RESET ボタンを押してアラーム表示を消
します。
8. 軸操作画面に表示されている X-CW の X
座標をメモします。
9. ORG ボタンを押して、原点復帰を行い
ます。
6 Y-CCW のオーバートラベル(OT)センサの
Y 座標を調べます。
1. カセット タブをクリックして、カセット操作画
面を表示させます。
2. カセット位置の入力欄に「140」と入力し、
移動 ボタンをクリックします。
ヘッド部がカセット位置「140」へ移動します。
3. 軸操作 タブÎXY ボタンをクリックして、
XY 軸操作画面を表示させます。
ソフトウェアリミットセットアップ
HLF-20317-01
ソフトウェアリミットセットアップ
SHEET
7/9
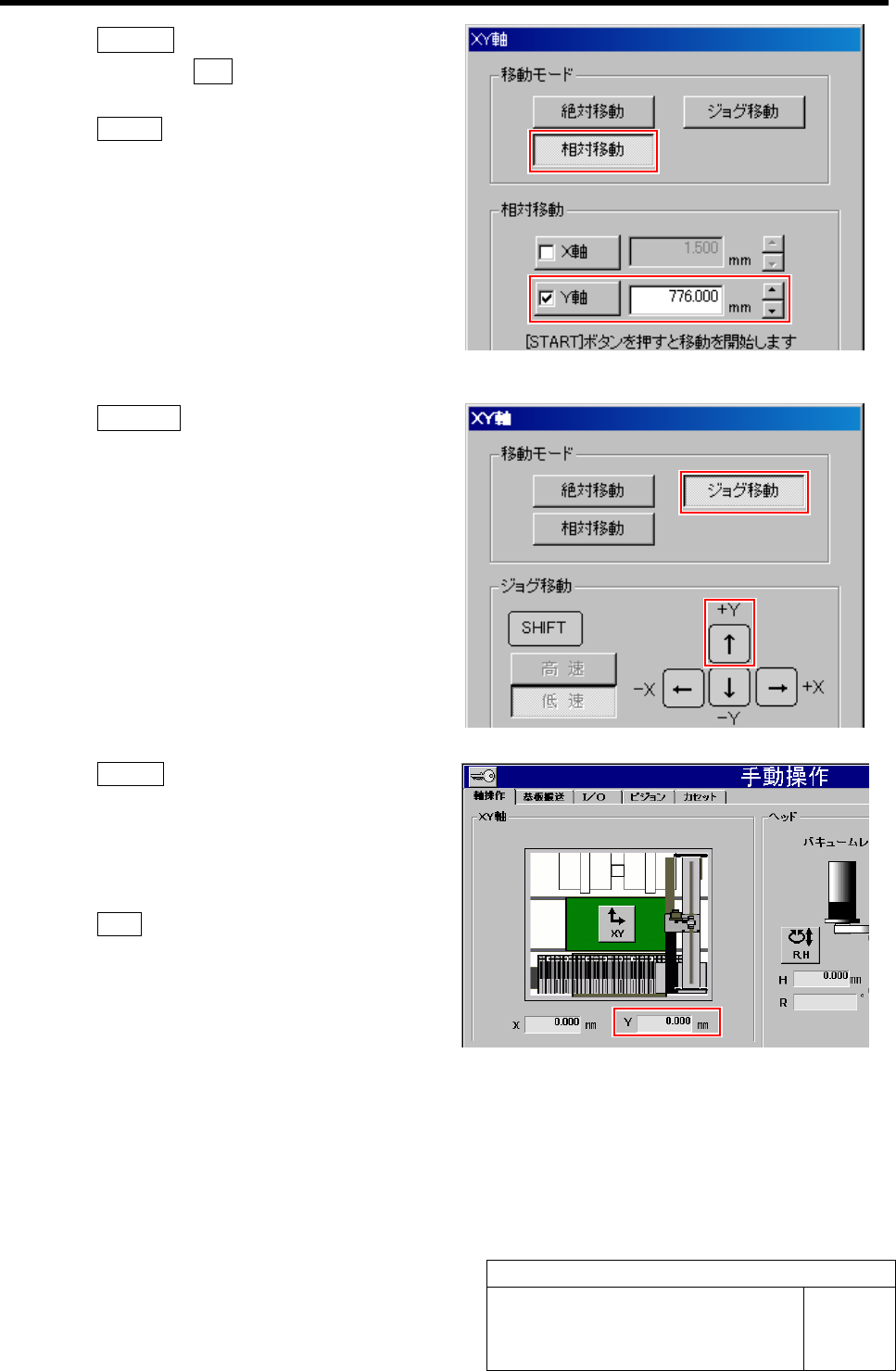
4. 相対移動 ボタンをクリックします。
5. 相対移動の Y 軸 ボタンをクリックします。
6. Y 軸の数値入力欄に「776.000」を入力して
START ボタンを押します。
Y 軸がカセット 101 の位置から、プラス 776.0 mm
相対移動します。
7. ジョグ移動 ボタンをクリックします。
8. 低速ジョグ移動で、上カーソルを 1 回ずつ
クリックして Y 軸を
プラス
方向に移動させま
す。
オーバートラベル位置まで移動すると、アラーム
が表示されます。
9. RESET ボタンを押してアラーム表示を消
します。
アラーム表示が消え、軸操作画面に戻ります。
10. 軸操作画面に表示されている Y-CCW の Y
座標をメモします。
11. ORG ボタンを押して、原点復帰を行い
ます。
ソフトウェアリミットセットアップ
HLF-20317-01
ソフトウェアリミットセットアップ
SHEET
8/9
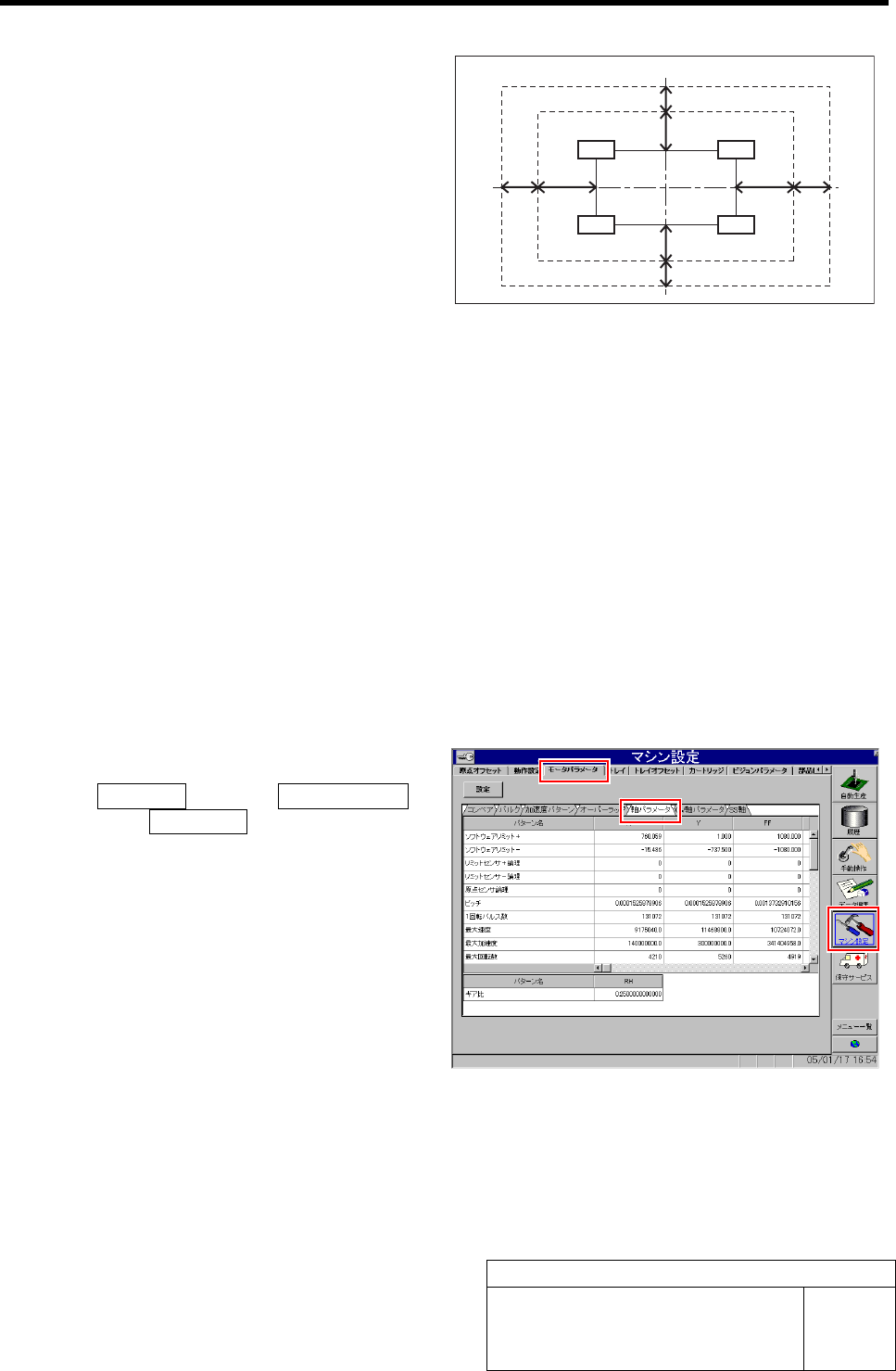
7 ソフトウェアリミット(SL)センサの座標を決め
ます。
1. X 軸マイナス側ソフトウェアリミットセンサの
座標は、以下の条件に合うように算出しま
す。
<座標条件>
・ カセット吸着位置から 73.0±0.05 mm の隙間が
ある。
・ OT 座標から 0.5 mm 以上の隙間がある。
2. X 軸プラス側ソフトウェアリミットセンサの座標は、以下の条件に合うように算出します。
<座標条件>
・ カセット吸着位置から 1.0±0.05 mm の隙間がある。
・ OT 座標から 0.5 mm 以上の隙間がある。
3. Y 軸マイナス側ソフトウェアリミットセンサの座標を以下の条件に合うように算出します。
<座標条件>
・ カセット吸着位置から 5.0±0.05 mm の隙間がある。
・ OT 座標から 0.5 mm 以上の隙間がある。
4. Y 軸プラス側ソフトウェアリミットセンサの座標を以下の条件に合うように算出します。
<座標条件>
・ トレイ吸着位置からの隙間は規定無し。
・ OT 座標から 0.5 mm 以上の隙間がある。
8 ソフトウェアリミット値を設定します。
1. マシン設定 メニューÎモータパラメータ
タブÎ軸パラメータ タブの順にクリックし
ます。
軸パラメータが表示されます。
ノズル動作エリア
OT 境界
吸着位置エリア
X 軸
Y 軸
トレイ L
トレイ R
Z101
Z140
SL 境界
0.5 mm 以上
規定なし
5±0.05 mm
0.5 mm 以上
1±0.05 mm
0.5 mm 以上
0.5 mm 以上
73±0.05 mm