00191024-01.pdf - 第207页
Betriebsanleitung SIPLACE 80 S/F/G 7 Visionsystem e Ausgabe 07/97 ab Softwareversion SR.010.xx 7.2 LP-Visionsystem Einric hter 7 - 15 Marke nkoordinat en – 1D-Mus tersuchv erfahren ( 1-dime nsionales Verfah ren) für ei n…

7 Visionsysteme Betriebsanleitung SIPLACE 80 S/F/G
7.2 LP-Visionsystem Ausgabe 07/97 ab Softwareversion SR.010.xx
7 - 14 Einrichter
und die Anzeige-LED's für
–
die CPU
–
den Visionprozessor
–
dem Kameraeingang
–
die Bildschirmanzeige.
Die Schalter für “RESET” und “ABORT” finden Sie unterhalb der Anzeige-LED's
●
dem MVS500 Kamerainterface (Huckepackplatine) für bis zu vier CCD-Kameras.
7.2.2 Technische Daten
Kamera-Typ: SONY XC77
Anzahl der Pixel: Kamera 768 (H) x 494 (V)
Bild 640 (H) x 484 (V)
Gesichtsfeld: 5,7 mm x 5,7 mm
Beleuchtungsmethode: Auflichtverfahren (wird beim Meßvorgang aktiviert)
Bildverarbeitung: Korrelationsprinzip, Grauwertesystem
Prozessorzykluszeit: < 200 msec
Bildschirm: RGB - Monitor (VGA-Modus) 640 x 484 Pixel des Stations-
rechners
Paßmarken: Bibliotheksspeicher für bis zu 255 Markendefinitionen
7.2.3 Funktionsbeschreibung
Vor dem Bestücken werden Lage, Verdrehwinkel und Scherung der Leiterplatte aufgrund der Positionen der
Paßmarken vom LP-Visionsystem ermittelt. Abweichungen von den Sollwerten werden dann als Korrekturen
in die Bestückpositionen der Bauelemente eingerechnet.
Auf einer Leiterplatte müssen mindestens 2 Paßmarken aufgetragen sein, damit das System Abweichungen
der LP-Position und des LP-Drehwinkels zu erkennen vermag. Bei Auftrag von 3 Paßmarken erhalten Sie
zusätzlich Informationen über Stauchungen und Verzüge der Leiterplatte und des Leiterplattenlayouts.
7.2.4 Funktionsablauf
Bevor eine Marke zur LP-Erkennung verwendet werden kann, muß sie zunächst “geteacht” worden sein, d. h.
die Markenstrukturparameter müssen im LP-Visionsystem für das Muster abgespeichert sein.
●
Mit der am Bestückkopf angebrachten LP-Vision-Kamera und dem Visionprogramm wird die Markenstruk-
tur geteacht.
Die Visionauswerteeinheit ermittelt mit Methoden der digitalen Bildverarbeitung die signifikanten Marken-
strukturparameter.
●
Das Meßverfahren läuft in 2 Stufen ab:
–
2D-Mustersuchverfahren (2-dimensionales Verfahren) im Grobraster und vorläufige Bestimmung der
Betriebsanleitung SIPLACE 80 S/F/G 7 Visionsysteme
Ausgabe 07/97 ab Softwareversion SR.010.xx 7.2 LP-Visionsystem
Einrichter 7 - 15
Markenkoordinaten
–
1D-Mustersuchverfahren (1-dimensionales Verfahren) für eine genaue Lagebestimmung der Paßmar-
ken.
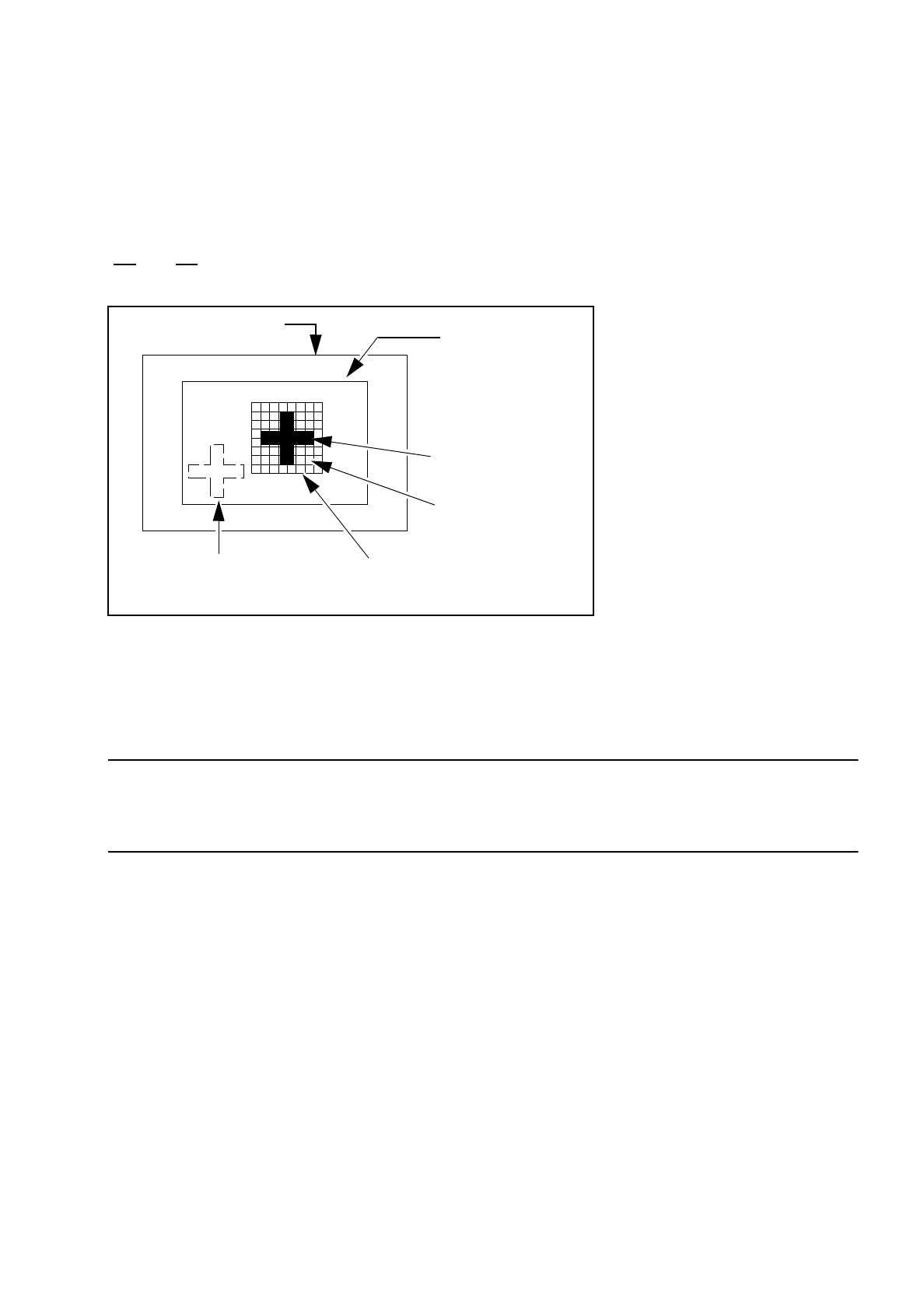
Bei dem 2D-Mustersuchverfahren wird das Mustererkennungsfenster in Moxelbereiche aufgeteilt. Moxel
(
Mo
saikpi
xel
) sind Pixelfelder mit z. B. 16 x 16, 8 x 8 usw. Pixel. Je niedriger die Pixelanzahl, desto höher die
Auflösung und desto niedriger die Suchgeschwindigkeit.
Abb. 7.2.1 Erklärung von Kamerasichtfeld, Suchfeld und Mustersuchfenster
Das Mustersuchfenster wird in Moxelschritten über das Suchfeld geführt. Die Grauwerte eines jeden Moxels
der Referenzpaßmarke werden dabei errechnet. Diese reduzierte Datenstruktur enthält genügend Informatio-
nen über die Grobstruktur und Lage der Referenzpaßmarke.
HINWEIS
Das Suchfenster soll so klein wie möglich gewählt werden, um eine hohe Suchgeschwindigkeit zu erreichen,
sollte allerdings auch groß genug sein, um die Marke eindeutig zu reidentifizieren.
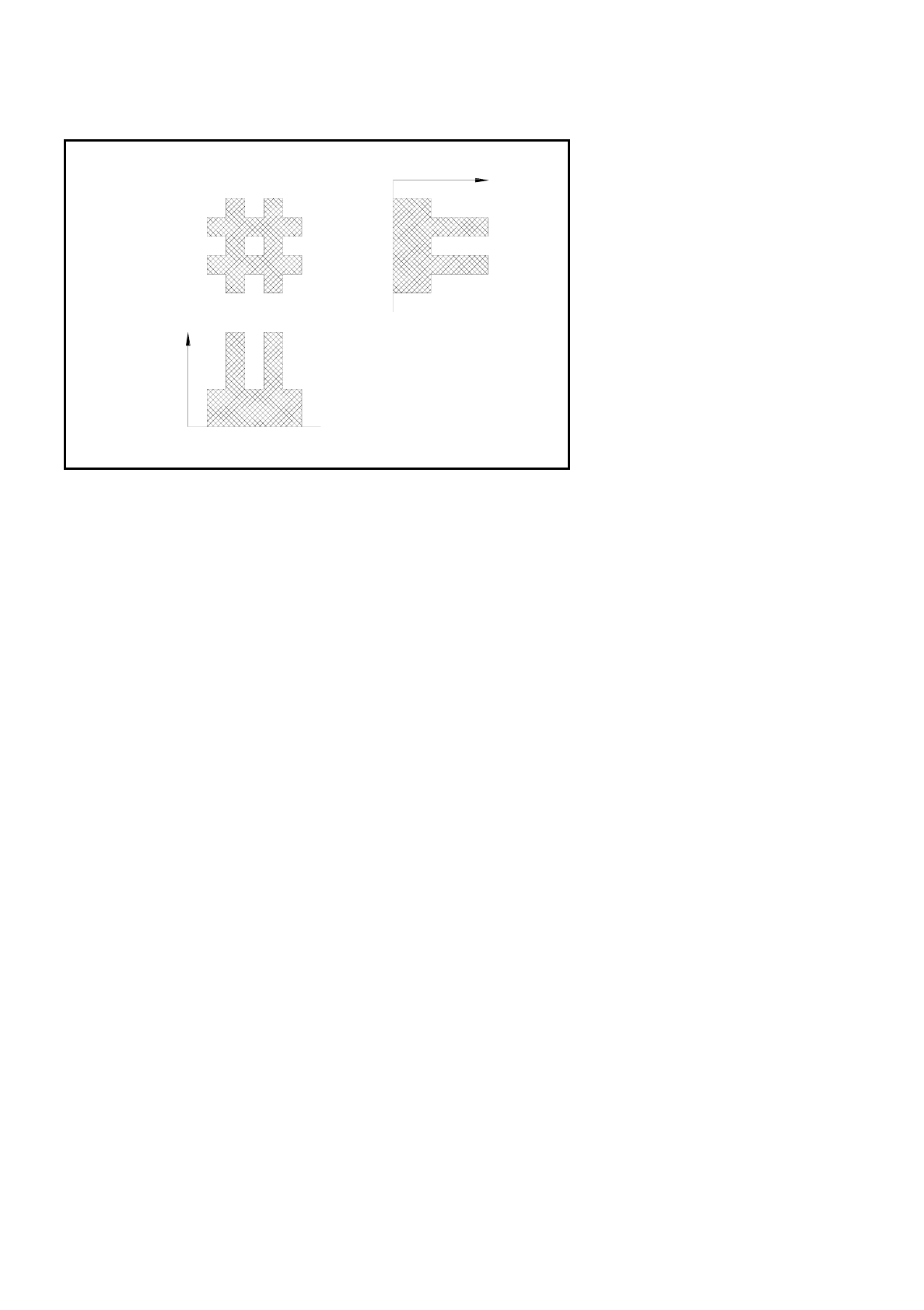
Zur genauen Muster- und Lagebestimmung der Paßmarke wird das 1D-Mustersuchverfahren eingesetzt. Das
Markenabbild wird zeilen- und spaltenweise zerlegt und die Grauwerte innerhalb einer jeden Zeile und Spalte
aufsummiert. Diesen Prozeß anhand eines Doppelkreuzes veranschaulicht das nächste Bild.
Suchfeld
≤
Kamera-
sichtfeld
(In diesem Bereich
wird nach der Marke
gesucht.)
Referenzpaßmarke
Moxel = Pixelfeld
z.B. 16 x 16 Pixel
Sichtfeld der Kamera
Die zu suchende Marke Mustersuchfenster
(Es enthält die Referenzpaßmarke)
7 Visionsysteme Betriebsanleitung SIPLACE 80 S/F/G
7.2 LP-Visionsystem Ausgabe 07/97 ab Softwareversion SR.010.xx
7 - 16 Einrichter
Abb. 7.2.2 Zeilen- und Spaltenprofil eines Doppelkreuzes
●
Aus den Horizontal- bzw. Vertikalprofilen wird die Position der Marke genau bestimmt. Nach dem Teachen
werden die gewonnenen Markenstrukturparameter im Linienrechner abgespeichert.
●
Nun wird das gespeicherte Modell getestet. Dabei verfährt das Portal die Leiterplattenkamera in alle
4 Ecken des Suchfeldes über der Leiterplatte (worst case). Das Visionsystem muß bei diesem Test die
Marke viermal reidentifizieren.
●
Zum Schluß werden die Koordinaten einer jeden Paßmarke (mindestens zwei) in die NU-Datei manuell
eingetragen oder aus der CAD-Datei in die NU-Datei übernommen. Damit sind Koordinaten und Marken-
strukturparameter für die zu bestückende Leiterplatte als Modell im System festgelegt.
●
Beim Bestückprozeß werden dann wiederum mit den zuvor beschriebenen Bildverarbeitungsmethoden,
2D- und 1D-Verfahren die Paßmarkenparameter ermittelt. Das Mustersuchfenster wird in Moxelschritten
über das Suchfeld geführt und auf größtmögliche Übereinstimmung bei den Grauwerten von Referenzpaß-
marke und Leiterplattensuchmarke abgesucht (Korrelationsverfahren). Bei Übereinstimmung von Refe-
renz- und Suchmarke ist die Korrelation maximal.
●
Ist die Marke gefunden, startet unter sehr genauer Bestimmung von Geometrie und Koordinaten der Paß-
marke das 1D-Mustersuchverfahren. Die genaue Markenform und Koordinaten werden nun jeweils über
die Spalten- und Reihenprofile (siehe vorherige Abbildung) mit dem Korrelationsverfahren bestimmt. Aus
den gewonnenen Koordinaten werden Lage, Verdrehung und Scherung der Leiterplatte bestimmt.
Ausschußmarkierungen (= Inkpunkte) werden ebenso nach der oben beschriebenen Methode erfaßt und
ausgewertet.
7.2.5 Kriterien zur Erstellung von Paßmarken
Grundsätzlich gelten sowohl für Paßmarken als auch für Ausschußmarkierungen (Inkpunkte) die gleichen Kri-
terien: Eindeutigkeit der Markenformen und gut erkennbare Strukturen, die sich eindeutig von der Umgebung
abheben.
Marke
Summe der
Grauwerte
spaltenweise:
Spaltenprofil
Summe der
Grauwerte
zeilenweise:
Zeilenprofil