CX-1_MS.pdf - 第107页
Rev.2.00 MS 参数 参 数 参 数 参 数 4-72 4 4 4 4 - - - - 15 . 15. 15. 15. 真空 真空 真空 真空 4 4 4 4 - - - - 15. 1. 15. 1. 1 5.1 . 15. 1. 真 空 真空 真空 真空 4 4 4 4 - - - - 15 15 15 15 - - - - 1 1 1 1 - - - - 1 1 1 1 . . . . 功能 功能 功能 功能 比较组装装…
Rev.2.00
MS 参数
参数参数
参数
4-71
4
44
4-
--
-14.
14.14.
14. 贴装头待机位置
贴装头待机位置贴装头待机位置
贴装头待机位置
4
44
4-
--
-14.1.
14.1.14.1.
14.1. 功能
功能功能
功能
设定送入基板时,生产结束时,取下吸嘴时和以外时(显示废弃)的贴装头的待机位置。
4
44
4-
--
-14.2.
14.2.14.2.
14.2. 使用夹具
使用夹具使用夹具
使用夹具
本设定不使用夹具。
4
44
4-
--
-14.3.
14.3.14.3.
14.3. 操作
操作操作
操作
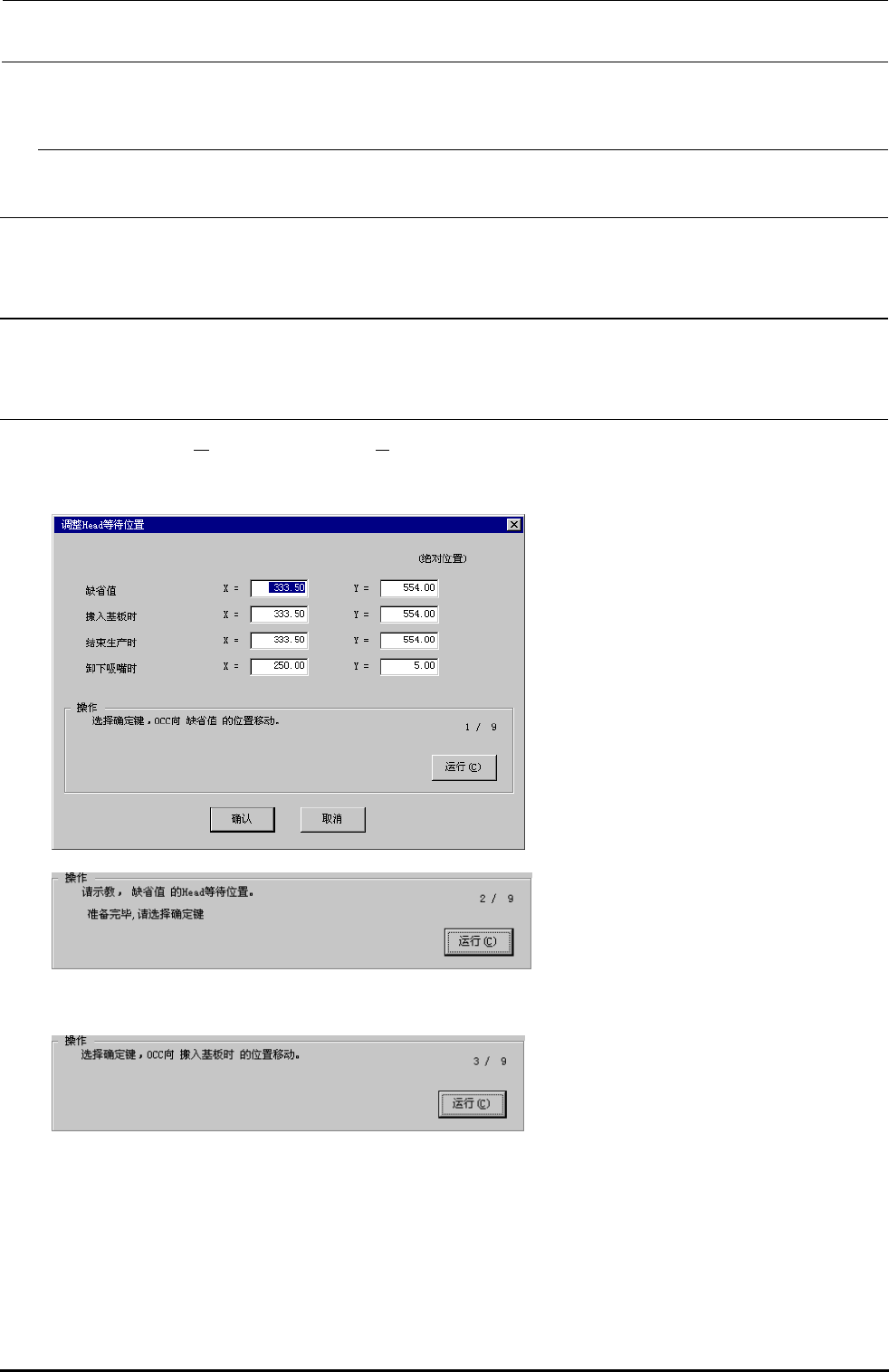
选择了[偏差设定(O)][贴装头待机位置(E)...]之后,显示出下面的调整 Head 等待位置的画面。
<
<<
<操作
操作操作
操作・1/9>
・1/9>・1/9>
・1/9>
准备完毕,请选择确认。
选择了确认之后,OCC 移动到废弃的贴装
头待机位置。
<
<<
<操作
操作操作
操作・2/9>
・2/9>・2/9>
・2/9>
通过演示,求废弃的贴装头待机位置,然
后按 HOD 的确定键。
演示结束之后,用求的坐标更新废弃的贴
装头待机位置。
准备完毕,请选择确认。
选择了确认之后,变为下一个贴装头待机
位置的设定画面。
<
<<
<操作
操作操作
操作・9/9>
・9/9>・9/9>
・9/9>
设定完毕。
选择了确认之后,返回初期设定画面。
※直接输入坐标值,把游标调整到坐标值,进行演示也不能取得坐标值。
※初期值的废弃以外在校准部的中央。
Rev.2.00
MS 参数
参数参数
参数
4-72
4
44
4-
--
-15.
15.15.
15. 真空
真空真空
真空
4
44
4-
--
-15.1.
15.1.15.1.
15.1. 真空
真空真空
真空
4
44
4-
--
-15
1515
15-
--
-1
11
1-
--
-1
11
1.
..
.功能
功能功能
功能
比较组装装置时工厂取得的 MS 参数的真空值和自我校准取得的现在值分析故障。
通常,MS 参数的操作只在工厂进行,不需要重新取得。操作仅进行自我校准。
4
44
4-
--
-15
1515
15-
--
-1
11
1-
--
-2
22
2.
..
.使用夹具
使用夹具使用夹具
使用夹具
本设定不使用夹具。
4
44
4-
--
-1
11
15
55
5-
--
-1
11
1-
--
-3
33
3.
..
.操作
操作操作
操作
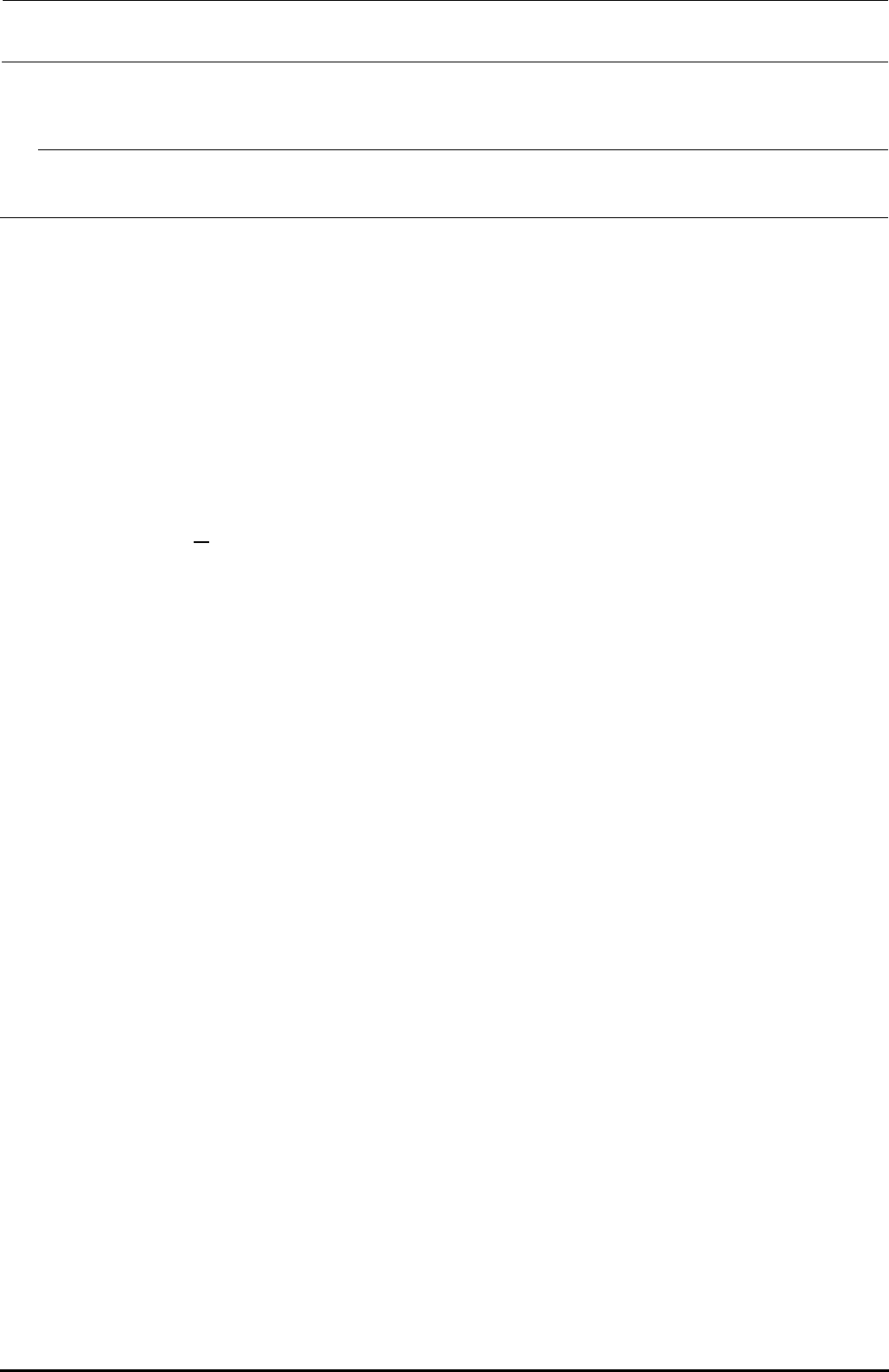
选择了[偏差设定(O)][真空校准]之后,显示出真空校准的画面。
Rev.2.00
MS 参数
参数参数
参数
4-73
<
<<
<操作
操作操作
操作・1/4(
・1/4(・1/4(
・1/4(真空达到情况
真空达到情况真空达到情况
真空达到情况)>
)>)>
)>
选择用设定贴装头测定的贴装头,按照操
作程序进行操作。
首先,测定“真空达到情况”。打开真空电
磁阀之后,就可以确认贴装头的真空传感
器和 ATC 真空传感器的测定值是如何变
化的。
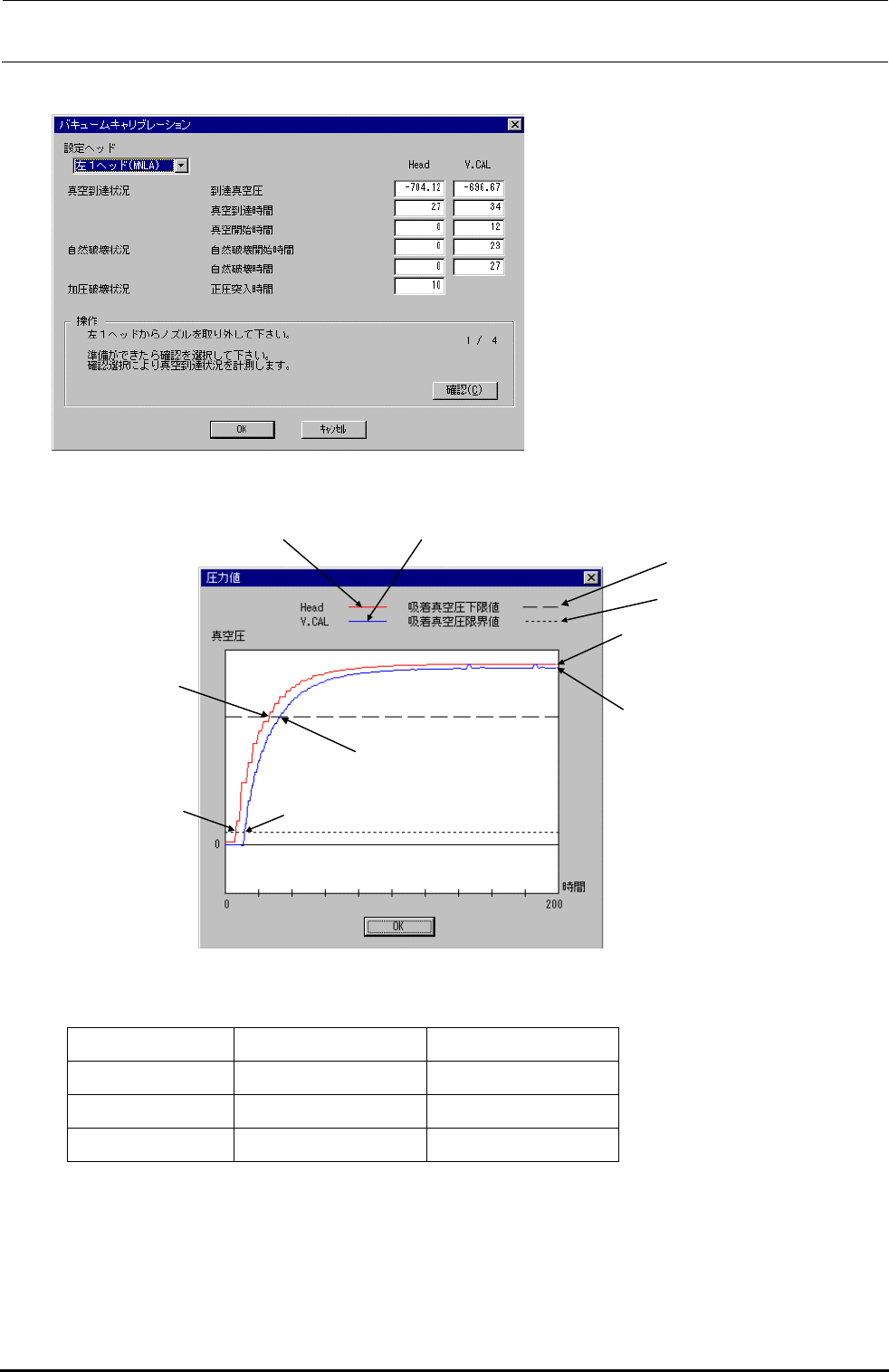
显示的曲线图表和画面测定值图下所示
显示的曲线图表和画面测定值图下所示显示的曲线图表和画面测定值图下所示
显示的曲线图表和画面测定值图下所示。
。。
。
标准值如下所示。
Head V. CAL
真空到达压 -93.31~-81.31Kpa -93.31~-79.98Kpa
真空到达时间 15~28ms 20~40ms
真空开始时间 5~14ms 7~16ms
选择了 OK 之后,返回原来的画面。
真空到
V.CAL
<
真空到
Head
<
真空到
V.CAL
<
ATC
的真空
贴装头真空
真空到
Head
<
达到真空
V.CAL
<
6.67Kpa
66.7Kpa
达到真空
Head
<