CX-1_MS.pdf - 第115页
Rev.2.00 MS 参数 参 数 参 数 参 数 4-80 4 4 4 4 - - - - 18. 2. 18. 2. 1 8.2 . 18. 2. 测 力传 感 器偏 差 测力 传 感 器偏 差 测力 传 感 器偏 差 测力 传 感 器偏 差 设定测力传感器的装配位置、装配高度。 4 4 4 4 - - - - 1 1 1 1 8 8 8 8 - - - - 2 2 2 2 - - - - 1 1 1 1 . . . . 使 使 …
Rev.2.00
MS 参数
参数参数
参数
4-79
4
44
4-
--
-18.
18.18.
18. 测力传感器
测力传感器测力传感器
测力传感器
4
44
4-
--
-18.1.
18.1.18.1.
18.1. 测力传感器参数
测力传感器参数测力传感器参数
测力传感器参数
4
44
4-
--
-1
11
18
88
8-
--
-1
11
1-
--
-1
11
1.
. .
. 功能
功能功能
功能
设定测力传感器的电压灵敏度和容量。
4
44
4-
--
-1
11
18
88
8-
--
-1
11
1-
--
-2.
2. 2.
2. 使用夹具
使用夹具使用夹具
使用夹具
本项目中不使用夹具。
4
44
4-
--
-1
11
18
88
8-
--
-1
11
1-
--
-3
33
3.
. .
. 操作
操作操作
操作
选择[偏差设定(O)][载荷测定用偏差(D)][ 测力传感器参数(P)…]后,会出现如下的测力传感器
参数设定界面。
直接从键盘输入数字。设定项目如下表所示。
No.
No.No.
No.
项目
项目项目
项目
设定的内容
设定的内容设定的内容
设定的内容
1
电压灵敏度(
mV/V
)
各测力传感器固有的电压灵敏度
2
容量(
g
)
测力传感器的容量种类
注)选择「确定」关闭对话框时,即写入测力传感器的电压灵敏度和容量。同时,显示以下信息。
请保存后再结束。(不保存的话则会发生不匹配。)
Rev.2.00
MS 参数
参数参数
参数
4-80
4
44
4-
--
-18.2.
18.2.18.2.
18.2. 测力传感器偏差
测力传感器偏差测力传感器偏差
测力传感器偏差
设定测力传感器的装配位置、装配高度。
4
44
4-
--
-1
11
18
88
8-
--
-2
22
2-
--
-1
11
1.
. .
. 使
使使
使用夹具
用夹具用夹具
用夹具
· E2101998000:模具吸嘴
4
44
4-
--
-18
1818
18-
--
-2
22
2-
--
-2.
2. 2.
2. 操作
操作操作
操作
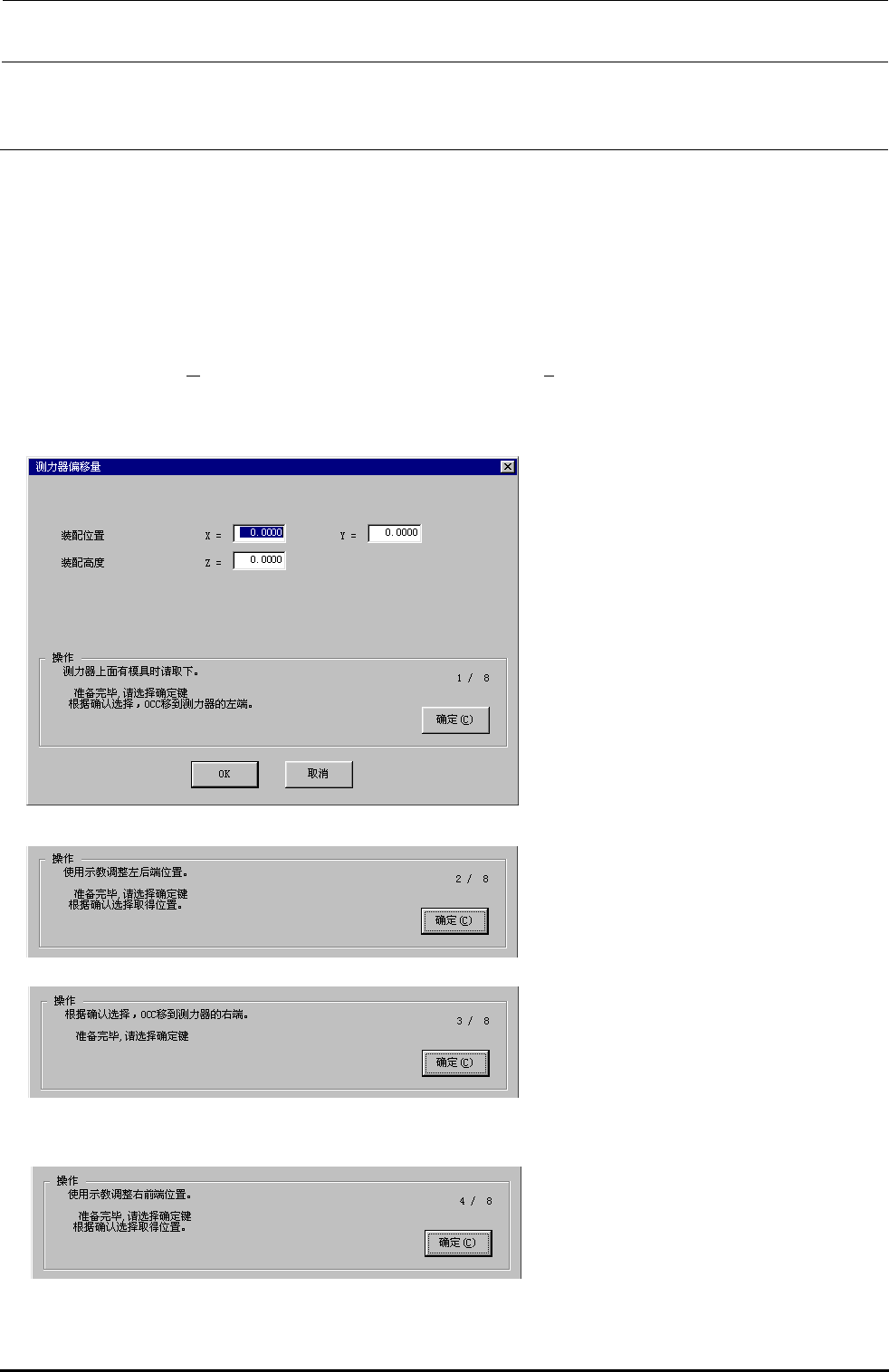
选择[偏差设定(O)][载荷测定用偏差][ 测力传感器偏差(L)…]后,会出现如下的测力传感器偏差
设定界面。
<
<<
<操作·
操作·操作·
操作·1/8
1/81/8
1/8(装配位置)
(装配位置)(装配位置)
(装配位置)>
>>
>
测力传感器上如有模具则请拿掉。
准备完毕后,请选择运行键。
按运行键后,OCC 移动到测力传感器的左
端。
<
<<
<操作·
操作·操作·
操作·2/8
2/82/8
2/8(装配位置)
(装配位置)(装配位置)
(装配位置)>
>>
>
请利用示教求得测力传感器上的线的左
端位置坐标,再按 HOD 的确定键。
按运行键,则 OCC 移动到测力传感器的
右端。
请利用示教求得测力传感器的右端位置
坐标,再按 HOD 的确定键。
Rev.2.00
MS 参数
参数参数
参数
4-81
<
<<
<操作·
操作·操作·
操作·5/8
5/85/8
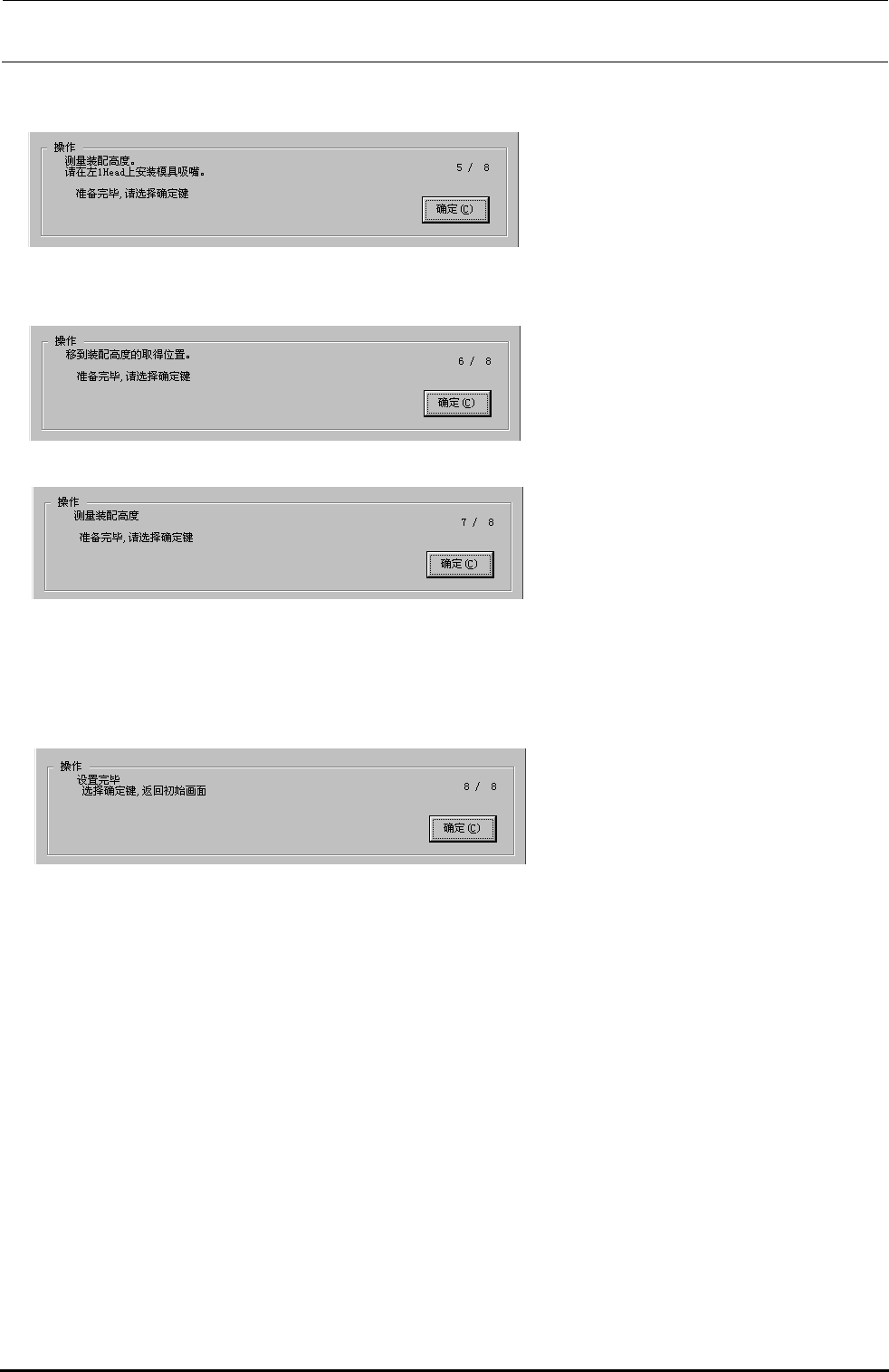
5/8(装配高度)
(装配高度)(装配高度)
(装配高度)>
>>
>
请把模具吸嘴安装到左 1 贴装头上。
准备完毕后请选择运行键。
※ 如果未设定电压灵敏度,则显示出错信
息。
<
<<
<操作·
操作·操作·
操作·6/8
6/86/8
6/8(装配高度)
(装配高度)(装配高度)
(装配高度)>
>>
>
选择运行键,即移动到取得测力传感器装
配高度的位置。
<
<<
<操作·
操作·操作·
操作·7/8
7/87/8
7/8(装配高度)
(装配高度)(装配高度)
(装配高度)>
>>
>
选择运行键,测定测力传感器的装配高
度。
·
··
·
测量内容
测量内容测量内容
测量内容
① 降下 Z 轴,测量测力传感器受到载荷的位置。
② 据第①步测定的位置更新测力传感器的装配高度。
<
<<
<操作·
操作·操作·
操作·8/8
8/88/8
8/8(装配高度)
(装配高度)(装配高度)
(装配高度)>
>>
>
设定结束。
选择确定键,以回到初始画面。