CX-1_MS.pdf - 第96页
Rev.2.00 MS 参数 参 数 参 数 参 数 4-61 4 4 4 4 - - - - 9. 9. 9. 9. 传送 偏 差 传送 偏 差 传送 偏 差 传送 偏 差 4 4 4 4 - - - - 9. 1. 9. 1. 9. 1. 9. 1. AWC AWC AWC AWC 偏差 偏差 偏差 偏差 ( ( ( ( 选 购 选购 选购 选购 ) ) ) ) 4 4 4 4 - - - - 9 9 9 9 - - - - 1 1…

Rev.2.00
MS 参数
参数参数
参数
4-60
<
<<
<操作
操作操作
操作・5/9(
・5/9(・5/9(
・5/9(组装高度
组装高度组装高度
组装高度)>
)>)>
)>
请把 505 号吸嘴安装到贴装头上。
准备完毕,选择确认。
选择了确认之后,测定测定用吸嘴的长
度。
<
<<
<操作
操作操作
操作・6/9(
・6/9(・6/9(
・6/9(组装高度
组装高度组装高度
组装高度)>
)>)>
)>
准备完毕,请选择确认。
选择确认之后,贴装头移动到 CVS 上。
<
<<
<操作
操作操作
操作・
・・
・7
77
7/9(
/9(/9(
/9(组装高度
组装高度组装高度
组装高度)>
)>)>
)>
用演示,调整贴装头的测定开始位置。
不需要调整时,也不需要演示。
准备完毕,请选择确认。选择确认之后,测定 CVS 的组装高度。
・
・・
・测定内容
测定内容测定内容
测定内容
①打开贴装头的真空,读取真空值。
此时,比真空值为-80Kpa 低时,为异常。请确认吸嘴。
②下降 Z 轴,测定真空值比-80Kpa 低的位置。
③ 用②测定的位置和测定用吸嘴长度计算出组装高度。
<
<<
<操作
操作操作
操作・8/9(
・8/9(・8/9(
・8/9(组装高度
组装高度组装高度
组装高度)>
)>)>
)>
从贴装头卸下吸嘴。
准备完毕,请选择确认。
<
<<
<操作
操作操作
操作・9/9>
・9/9>・9/9>
・9/9>
设定完毕。
选择确认之后,返回初期设定画面。
Rev.2.00
MS 参数
参数参数
参数
4-61
4
44
4-
--
-9.
9.9.
9. 传送偏差
传送偏差传送偏差
传送偏差
4
44
4-
--
-9.1.
9.1.9.1.
9.1. AWC
AWCAWC
AWC 偏差
偏差偏差
偏差(
((
(选购
选购选购
选购)
))
)
4
44
4-
--
-9
99
9-
--
-1
11
1-
--
-1
11
1.
..
.功能
功能功能
功能
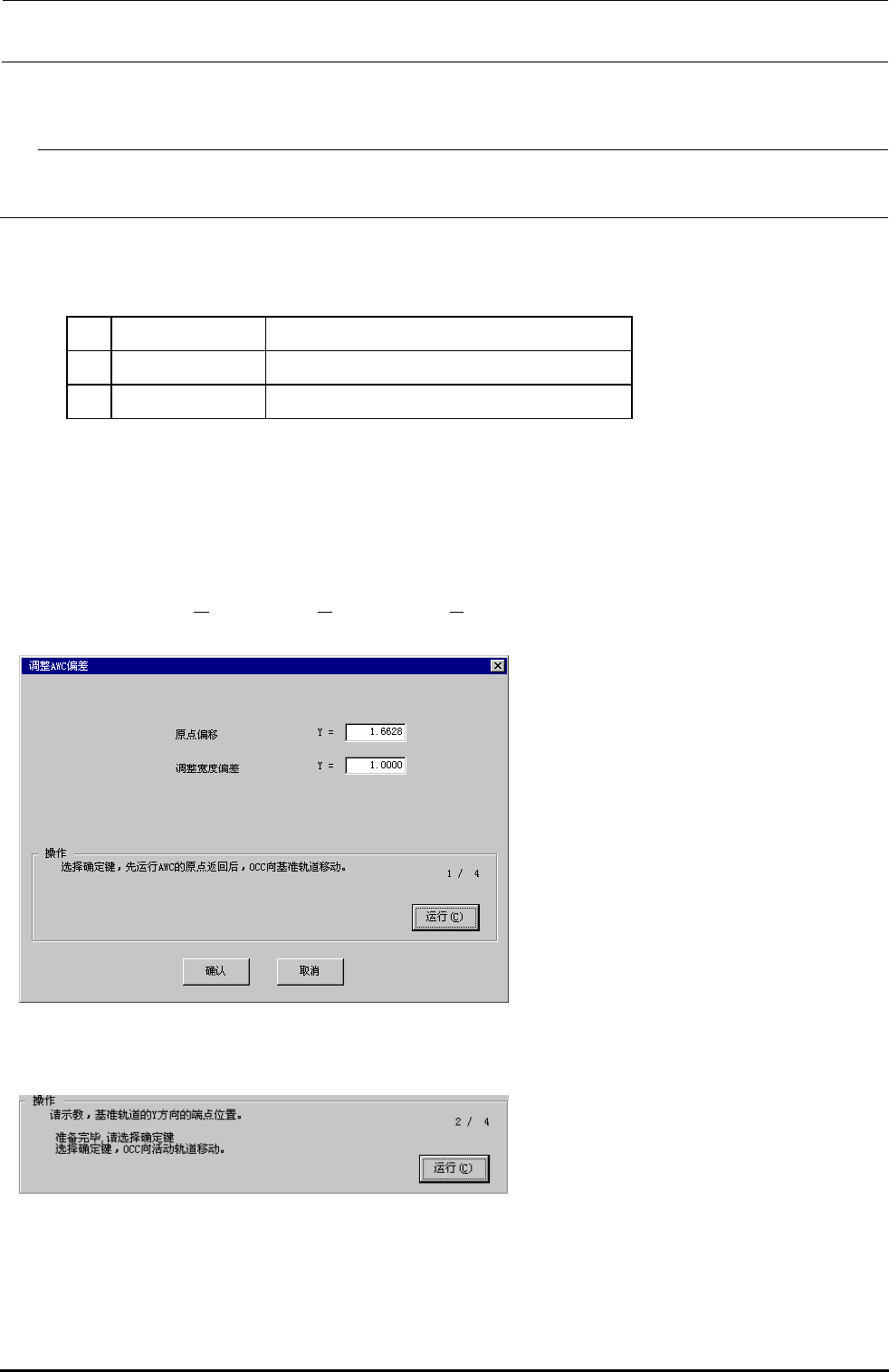
演示原点复位时的传送宽度,以便 AWC 能正确动作。
No
项目 设定内容
1
原点偏差
离
AWC
原点设计位置的偏差值
2
调整宽度偏差
AWC
移动时的富余宽度
4
44
4-
--
-9
99
9-
--
-1
11
1-
--
-2
22
2.
..
.使用夹具
使用夹具使用夹具
使用夹具
本设定不使用夹具。
4
44
4-
--
-9
99
9-
--
-1
11
1-
--
-3.
3.3.
3.操作
操作操作
操作
选择了[偏差设定(O)][传送偏差(R)][AWC偏差(A)...]之后,显示出下面的调整AWC偏差的设定画面。
<
<<
<操作
操作操作
操作・1/4>
・1/4>・1/4>
・1/4>
准备完毕,请选择确认。
选择了确认之后,AWC 原点复位,OCC
移动到基准轨上。
原点在最大基板宽度附近。
<
<<
<操作
操作操作
操作・2/4>
・2/4>・2/4>
・2/4>
通过演示,求基准轨道内侧的 Y 坐标,然
后按 HOD 确定键。
准备完毕,请选择确认。
选择确认之后,OCC 移动到可动轨上。
Rev.2.00
MS 参数
参数参数
参数
4-62
<
<<
<操作
操作操作
操作・3/4>
・3/4>・3/4>
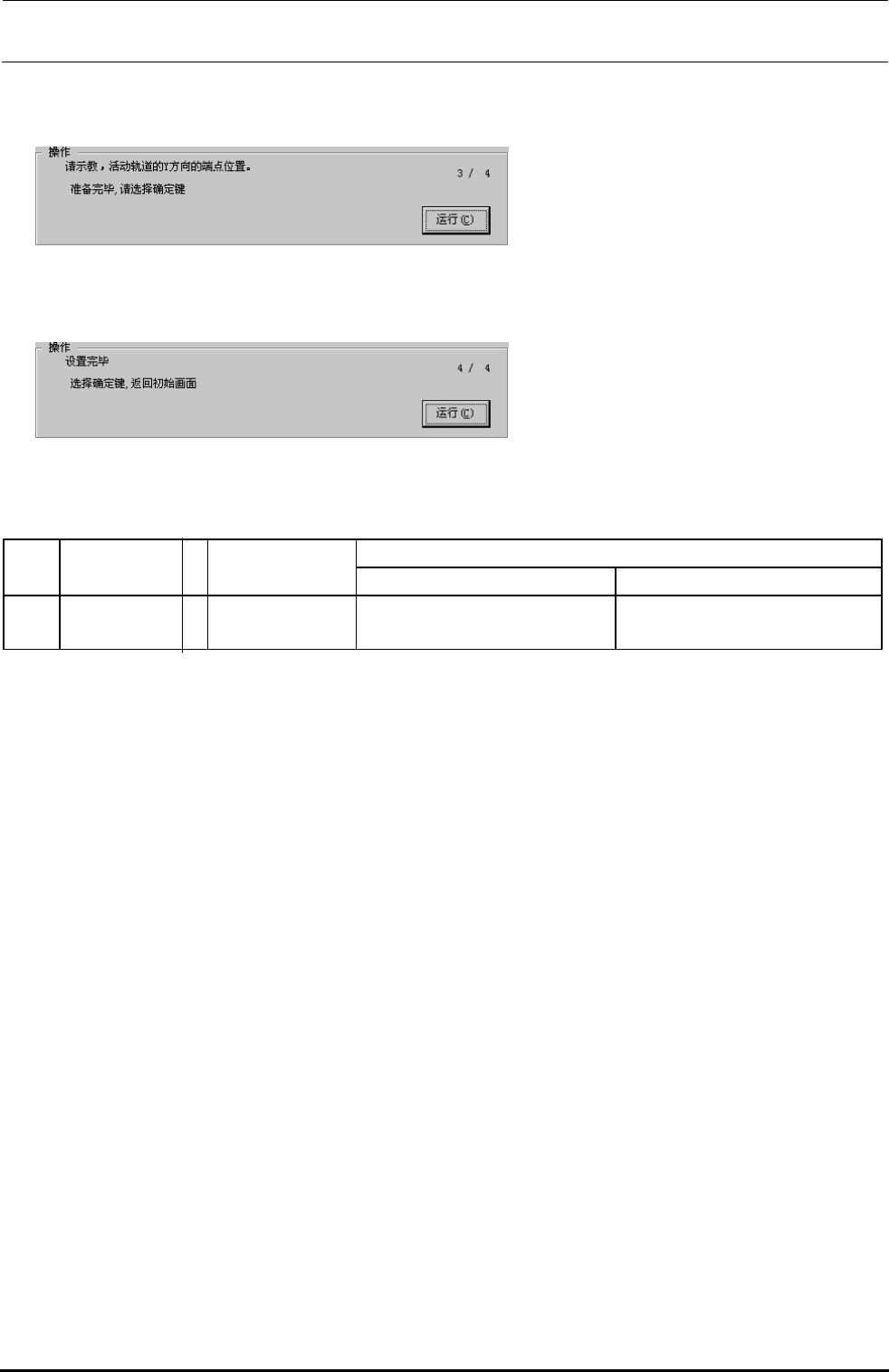
・3/4>
通过演示,求可动轨道内侧的 Y 坐标,然
后按 HOD 的确定键。
演示完毕,用求的 Y 坐标计算新的偏差
值。
准备完毕,选择确认。
<
<<
<操作
操作操作
操作・4/4>
・4/4>・4/4>
・4/4>
设定完毕。
选择了确认之后,返回到初期设定画面。
4
44
4-
--
-9
99
9-
--
-1
11
1-
--
-4
44
4.MSP
.MSP.MSP
.MSP允许值
允许值允许值
允许值
MSP值不良时 No
项目
MSP允许值
异常点 调整(检查)项目
1
原点偏差值 ±3mm
原点复位动作不良
基板宽度自动调整设定不良
AWC马达的组装
(原点传感器和变换器位置