CX-1_MS.pdf - 第4页
Rev.2.00 MS 参数 参 数 参 数 参 数 ii 4 4 4 4 - - - - 10. 10. 10. 10. 吸附 基 准位 置 偏差 吸附 基 准 位置 偏 差 吸附 基 准 位置 偏 差 吸附 基 准 位置 偏 差 ..... ........ ......... ......... ......... ........ ....... ........ ......... ......... ......... ..…

Rev.2.00
MS 参数
参数参数
参数
i
目
目目
目
录
录录
录
1.
1.1.
1. 概要
概要概要
概要
................................
................................................................
................................................................
................................................................
................................................................
................................................................
.........................................................
..................................................
.........................
1
11
1-
--
-1
11
1
1
11
1-
--
-1
11
1.
..
.
定义
定义定义
定义 ............................................................................................................................................. 1-1
1
11
1-
--
-2
22
2.
..
.
起动和退出
起动和退出起动和退出
起动和退出 ................................................................................................................................. 1-1
1
11
1-
--
-3
33
3.
..
.
构成
构成构成
构成 ............................................................................................................................................. 1-3
1
11
1-
--
-4
44
4.
..
.
MS
MSMS
MS 参数的保存地方
参数的保存地方参数的保存地方
参数的保存地方 .................................................................................................................... 1-4
1
11
1-
--
-5
55
5.
..
.
基本操作
基本操作基本操作
基本操作 ................................................................................................................................... 1-11
2.
2.2.
2. 控制菜单
控制菜单控制菜单
控制菜单
................................
................................................................
................................................................
................................................................
................................................................
................................................................
..................................................
....................................
..................
2
22
2-
--
-1
11
1
2
22
2-
--
-1.
1.1.
1. 起动方法
起动方法起动方法
起动方法 ..................................................................................................................................... 2-1
2
22
2-
--
-2.
2.2.
2. 菜单内容
菜单内容菜单内容
菜单内容 ..................................................................................................................................... 2-1
2
22
2-
--
-3.
3.3.
3. XY
XYXY
XY 轴移
轴移轴移
轴移动
动动
动 ................................................................................................................................... 2-2
2
22
2-
--
-4.
4.4.
4. Z
ZZ
Z 任意坐标移动
任意坐标移动任意坐标移动
任意坐标移动 ........................................................................................................................... 2-3
2
22
2-
--
-5.
5.5.
5. 传送控制
传送控制传送控制
传送控制 ..................................................................................................................................... 2-4
2
22
2-
--
-6.
6.6.
6. 照明图
照明图照明图
照明图 ......................................................................................................................................... 2-4
2
22
2-
--
-7.
7.7.
7. 照明设定
照明设定照明设定
照明设定 ..................................................................................................................................... 2-5
2
22
2-
--
-8.
8.8.
8. 无传送原点复
无传送原点复无传送原点复
无传送原点复位
位位
位 .......................................................................................................................... 2-5
3
33
3 初期设定
初期设定初期设定
初期设定
................................
................................................................
................................................................
................................................................
................................................................
................................................................
..................................................
....................................
..................
3
33
3-
--
-1
11
1
3
33
3-
--
-1.
1.1.
1. 机器规格
机器规格机器规格
机器规格 ..................................................................................................................................... 3-1
3
33
3-
--
-2.
2.2.
2. 原点粗调整
原点粗调整原点粗调整
原点粗调整 .................................................................................................................................. 3-2
3
33
3-
--
-3.
3.3.
3. XY
XYXY
XY 修正系数
修正系数修正系数
修正系数 ................................................................................................................................ 3-3
3
33
3-
--
-4.
4.4.
4. 附属装置
附属装置附属装置
附属装置(
((
(选项
选项选项
选项)
))
)............................................................................................................................ 3-4
3
33
3-
--
-5.
5.5.
5. 动作规格
动作规格动作规格
动作规格 ..................................................................................................................................... 3-6
3
33
3-
--
-6.
6.6.
6. X
XX
X 轴弯曲校正
轴弯曲校正轴弯曲校正
轴弯曲校正 ............................................................................................................................ 3-12
3
33
3-
--
-7.
7.7.
7. X
XX
X 轴直角调整
轴直角调整轴直角调整
轴直角调整 ............................................................................................................................ 3-13
3
33
3-
--
-8.
8.8.
8. 注释
注释注释
注释........................................................................................................................................... 3-15
4
44
4 偏差设定
偏差设定偏差设定
偏差设定
................................
................................................................
................................................................
................................................................
................................................................
................................................................
..................................................
....................................
..................
4
44
4-
--
-1
11
1
4
44
4-
--
-1.
1.1.
1. 激光偏差
激光偏差激光偏差
激光偏差 ..................................................................................................................................... 4-1
4
44
4-
--
-2.
2.2.
2. OCC
OCCOCC
OCC 偏差
偏差偏差
偏差 .................................................................................................................................... 4-8
4
44
4-
--
-3.
3.3.
3. CAL
CALCAL
CAL 部偏差
部偏差部偏差
部偏差 ............................................................................................................................... 4-17
4
44
4-
--
-4.
4.4.
4. 贴装头偏差
贴装头偏差贴装头偏差
贴装头偏差 ................................................................................................................................ 4-19
4
44
4-
--
-5.
5.5.
5. VCS
VCSVCS
VCS 偏差
偏差偏差
偏差 ................................................................................................................................... 4-26
4
44
4-
--
-6.
6.6.
6. 共面偏差
共面偏差共面偏差
共面偏差 ................................................................................................................................... 4-52
4
44
4-
--
-7.
7.7.
7. ATC
ATCATC
ATC 偏差
偏差偏差
偏差 ................................................................................................................................... 4-55
4
44
4-
--
-8.
8.8.
8. CVS
CVSCVS
CVS 偏差
偏差偏差
偏差 ................................................................................................................................... 4-59
4
44
4-
--
-9.
9.9.
9. 传送偏差
传送偏差传送偏差
传送偏差 ................................................................................................................................... 4-61

Rev.2.00
MS 参数
参数参数
参数
ii
4
44
4-
--
-10.
10.10.
10. 吸附基准位置偏差
吸附基准位置偏差吸附基准位置偏差
吸附基准位置偏差 ................................................................................................................... 4-64
4
44
4-
--
-11.
11.11.
11. 贴装综合偏差
贴装综合偏差贴装综合偏差
贴装综合偏差 ........................................................................................................................... 4-66
4
44
4-
--
-12.
12.12.
12. SOT
SOTSOT
SOT 方向检查台偏差
方向检查台偏差方向检查台偏差
方向检查台偏差ト
トト
ト ............................................................................................................ 4-68
4
44
4-
--
-13.
13.13.
13. 极小芯片偏差
极小芯片偏差极小芯片偏差
极小芯片偏差 ........................................................................................................................... 4-70
4
44
4-
--
-14.
14.14.
14. 贴装头待机位置
贴装头待机位置贴装头待机位置
贴装头待机位置 ....................................................................................................................... 4-71
4
44
4-
--
-15.
15.15.
15. 真空
真空真空
真空 .......................................................................................................................................... 4-72
4
44
4-
--
-16.
16.16.
16. XY
XYXY
XY 轴偏航
轴偏航轴偏航
轴偏航 ................................................................................................................................. 4-78
4
44
4-
--
-17.
17.17.
17. 映射校正
映射校正映射校正
映射校正 .................................................................................................................................. 4-78
4
44
4-
--
-18.
18.18.
18. 测力传感器
测力传感器测力传感器
测力传感器 ............................................................................................................................... 4-79
4
44
4-
--
-19.
19.19.
19. θ
θθ
θ 轴偏差
轴偏差轴偏差
轴偏差 ................................................................................................................................. 4-82
5
55
5 版本升级
版本升级版本升级
版本升级
................................
................................................................
................................................................
................................................................
................................................................
................................................................
..................................................
....................................
..................
5
55
5-
--
-1
11
1
5
55
5-
--
-1.
1.1.
1. 图像
图像图像
图像 ............................................................................................................................................. 5-1
5
55
5-
--
-2.
2.2.
2. I/O
I/OI/O
I/O ............................................................................................................................................... 5-2
5
55
5-
--
-3.
3.3.
3. B/F
B/FB/F
B/F .............................................................................................................................................. 5-3
5
55
5-
--
-4.
4.4.
4. MCM/MCMR
MCM/MCMRMCM/MCMR
MCM/MCMR ................................................................................................................................ 5-4
6
66
6 程序的取消
程序的取消程序的取消
程序的取消
................................
................................................................
................................................................
................................................................
................................................................
................................................................
...............................................
..............................
...............
6
66
6-
--
-1
11
1
6
66
6-
--
-1.
1.1.
1. I/O
I/OI/O
I/O ............................................................................................................................................... 6-1
6
66
6-
--
-2
22
2.
..
. B/F
B/FB/F
B/F .............................................................................................................................................. 6-2
6
66
6-
--
-3.
3.3.
3. JVS
JVSJVS
JVS .............................................................................................................................................. 6-3
7
77
7 其它
其它其它
其它
................................
................................................................
................................................................
................................................................
................................................................
................................................................
.........................................................
..................................................
.........................
7
77
7-
--
-1
11
1
7
77
7-
--
-1.
1.1.
1. 激光测试仪标尺调整
激光测试仪标尺调整激光测试仪标尺调整
激光测试仪标尺调整 ................................................................................................................... 7-1
7
77
7-
--
-2.
2.2.
2. CAL
CALCAL
CAL 部件台
部件台部件台
部件台 ................................................................................................................................. 7-2
7
77
7-
--
-3.
3.3.
3. BOC
BOCBOC
BOC 标记位置的编辑
标记位置的编辑标记位置的编辑
标记位置的编辑 .................................................................................................................. 7-3
7
77
7-
--
-4.
4.4.
4. OCC
OCCOCC
OCC 更换组件偏差值
更换组件偏差值更换组件偏差值
更换组件偏差值 .................................................................................................................. 7-4
7
77
7-
--
-5.
5.5.
5. FCS
FCSFCS
FCS 模具元件吸附位置
模具元件吸附位置模具元件吸附位置
模具元件吸附位置 ............................................................................................................... 7-5
7
77
7-
--
-6.
6.6.
6. 元件识别跟踪偏移量
元件识别跟踪偏移量元件识别跟踪偏移量
元件识别跟踪偏移量 ................................................................................................................... 7-5
Rev.2.00
MS 参数
参数参数
参数
1-1
1. 概要
概要概要
概要
1.1. 定义
定义定义
定义
MS 参数是记录机器组装情况的数据,是动作的基础。MS 参数中,有有无附属品・记录动作规格等的「
「「
「初
初初
初
期设定
期设定期设定
期设定」
」」
」、
、、
、记录组装时与设计值的误差的「
「「
「偏差设定
偏差设定偏差设定
偏差设定」
」」
」以及记录控制基板更换后基板动作用的软件变更记
录的「
「「
「版本升级
版本升级版本升级
版本升级」
」」
」的 3 个项目。
「
「「
「偏差设定
偏差设定偏差设定
偏差设定」
」」
」的例子
的例子的例子
的例子
贴装头组装位置(CX-1 的左端(L1)贴装头时)
组装位置(51.8877)=设计值(51.5)+MS 参数(0.3877)
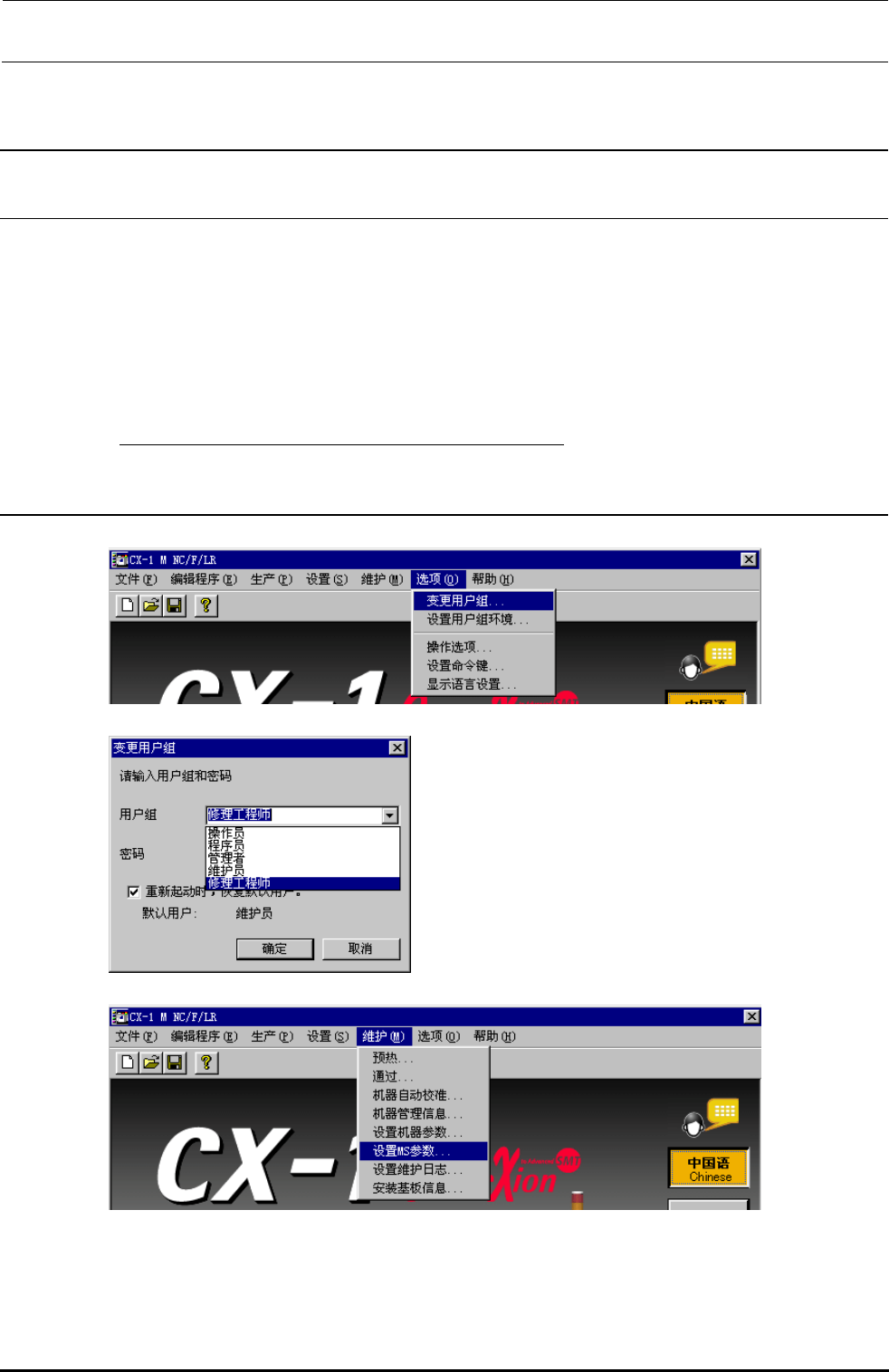
1.2. 起动和退出
起动和退出起动和退出
起动和退出
① 请把用户等级变更为“修理工程师”。
② 选择维护 → 设置 MS 参数。