NPM服务手册.pdf - 第99页
NPM 服务手册 4.3 XY 轴驱动关系 EN1SCC-83-030-C0 4.3-6 4. 将不测量侧的轴退避到机械 止动器的位置, 执行 ST700 信号调整程序的 < 位置数据 的确认 > 。 确认全部行程。 ( 图 5) = 基准值 = FRONT 侧 (-) 侧 机械止动器位置 : + 15.8 ~ +16.2mm (+) 侧 机械止动器位置 : -1172.5 ~ -1175.3mm REAR 侧 (-) 侧 机械止动器位…
NPM
服务手册
4.3 XY 轴驱动关系
EN1SCC-83-030-C0
4.3-5
Y 轴的原点调整
3.
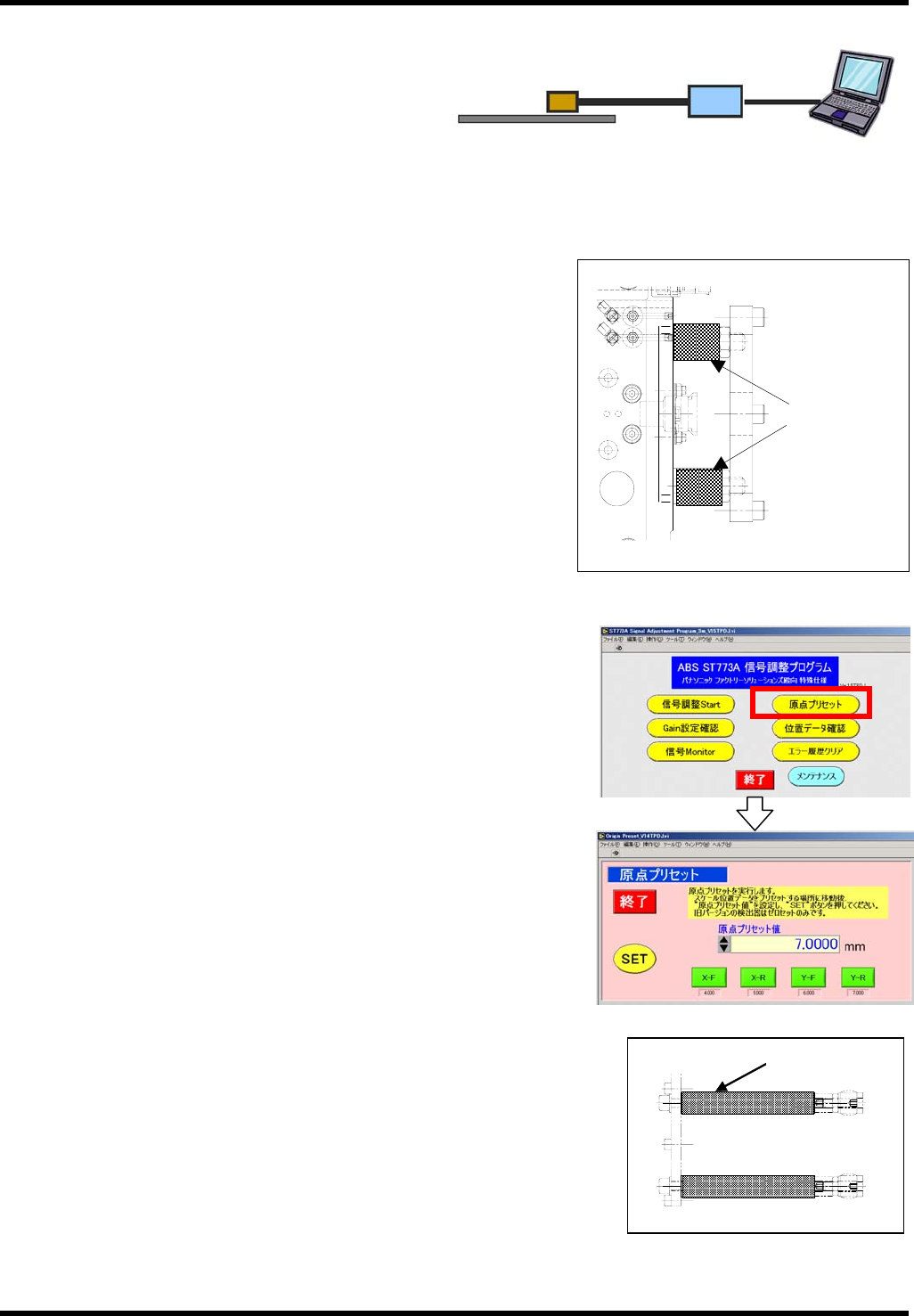
1. 将 PC 连接到 FRONT (REAR) 侧 Y 轴
的编码器头上。(图 1)
2. 将 X 轴板推压到 FRONT (REAR) 侧 Y 轴的 (-) 侧机械止动器上。
(图 2)
3. 执行 ST700 信号调整程序的<原点预设>。
(图 3)
=注意=
FRONT 侧
将头板推压到 (-) 侧的机械止动器上,
将+16.0mm 作为原点 (ORG)写入编码器头中。
REAR 侧
将头板推压到 (-) 侧的机械止动器上,
将-177.0mm 作为原点 (ORG)写入编码器头中。
※REAR 侧用托盘行程进行确认。
REAR 侧为料架规格时,在进行调整时,请卸下止动杆。
(图 3)
RS-485 RS-232C
I / F
变换装置
(图 1)
(图 2)
(-) 侧机械止动器
(图 3)
メカストッパBAR
(图 4)
机械止动器 BAR
NPM
服务手册
4.3 XY 轴驱动关系
EN1SCC-83-030-C0
4.3-6
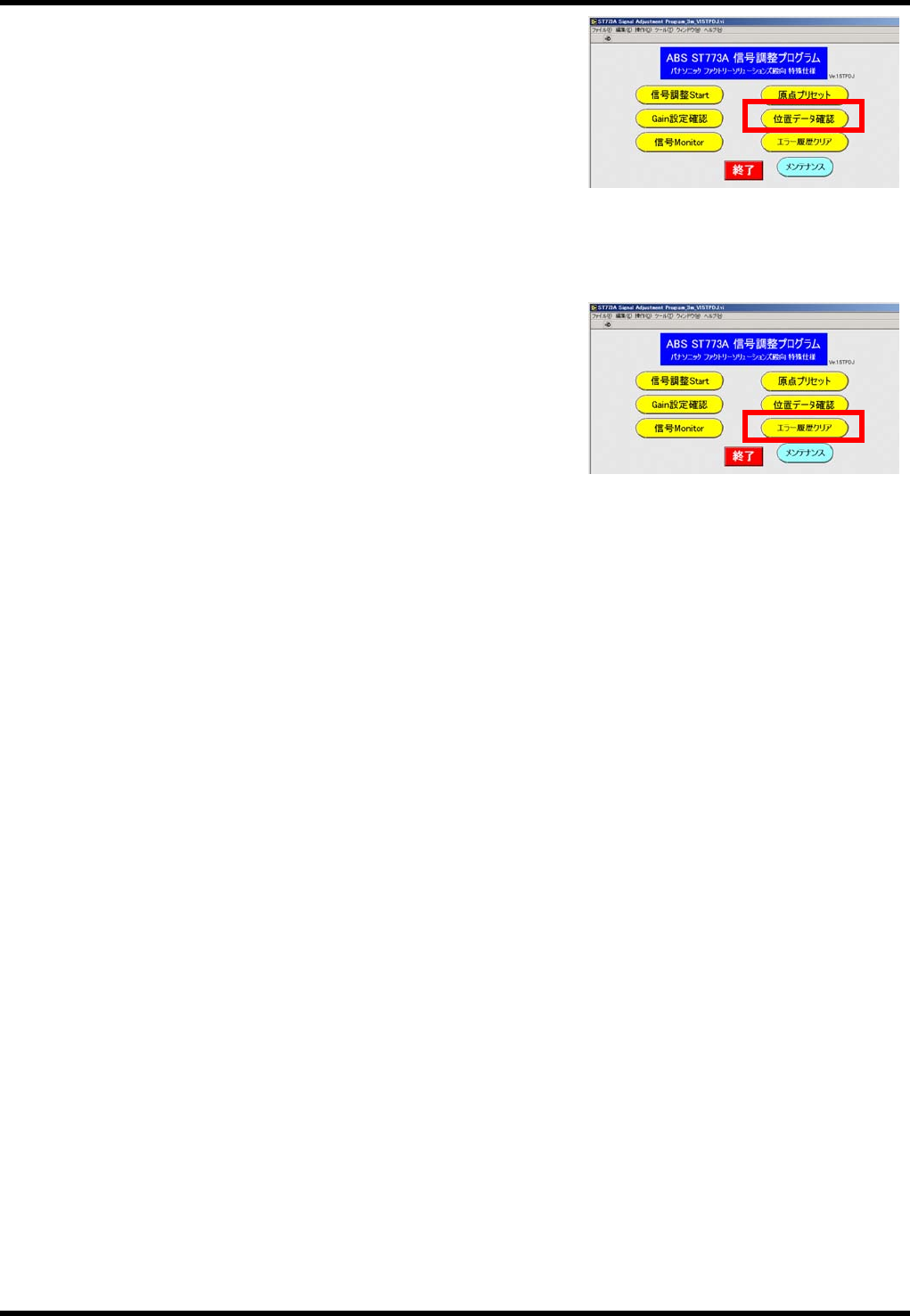
4. 将不测量侧的轴退避到机械止动器的位置,
执行 ST700 信号调整程序的<位置数据的确认>。
确认全部行程。(图 5)
=基准值=
FRONT 侧
(-) 侧 机械止动器位置 : + 15.8 ~ +16.2mm
(+) 侧 机械止动器位置 : -1172.5 ~ -1175.3mm
REAR 侧
(-) 侧 机械止动器位置 : -176.8 ~ -177.2mm
(+) 侧 机械止动器位置 : +1011.5 ~ +1014.3mm
5. 执行 ST700 信号调整程序的错误履历的清除,删除错误。 (图 6)
=注意=
REAR 侧为料架规格时,请不要忘记安装已卸下的止动杆。
(图 5)
(图 6)
NPM
服务手册
4.3 XY 轴驱动关系
EN1SCC-83-030-C0
4.3-7
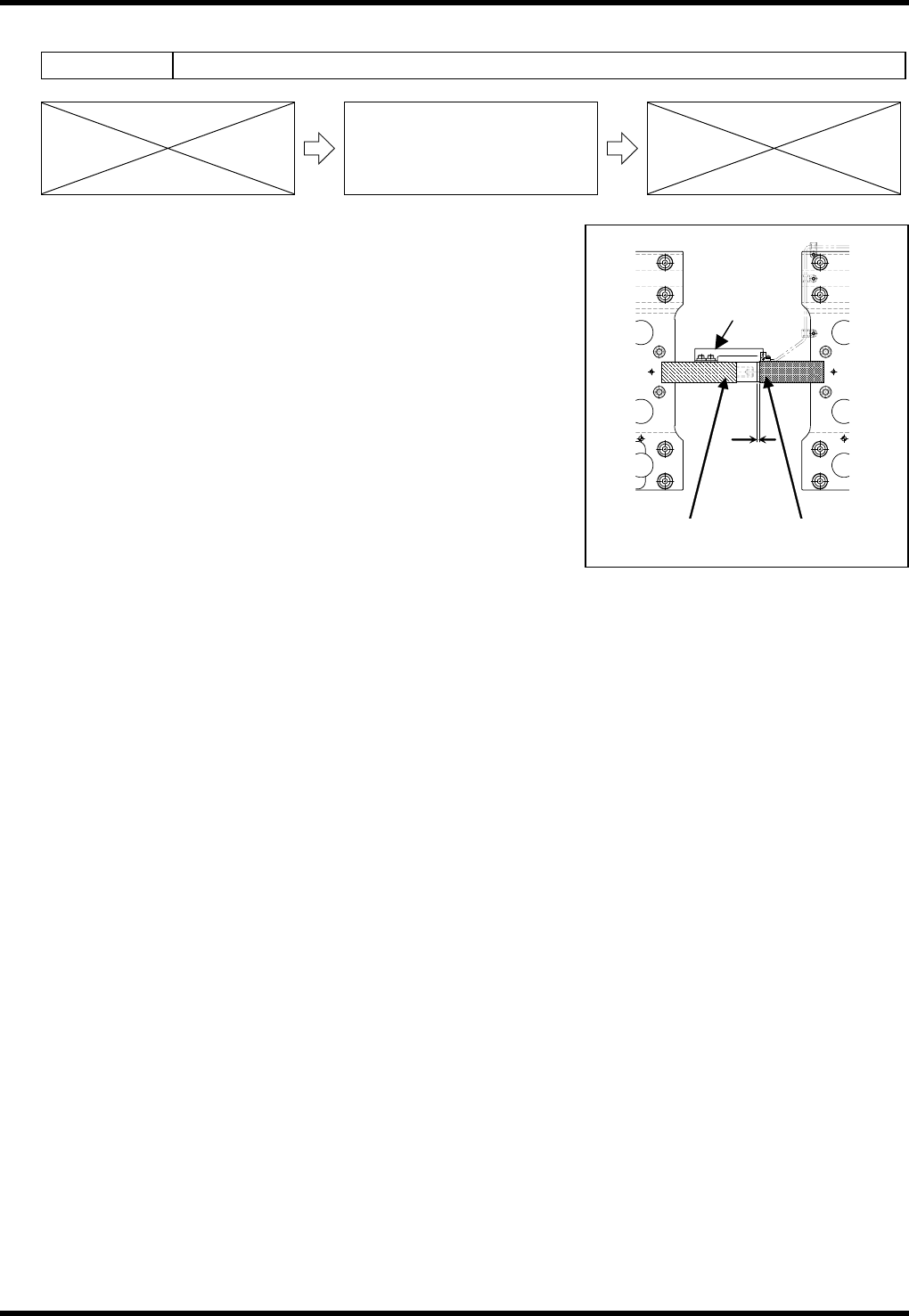
4.3.3 Y 轴干涉 PH 的调整
Unit No. N610052923AA
4.3.3 Y 轴干涉 PH 的调整
Y 轴干涉 PH 的调整
4.
1. 用手将 FRONT 侧轴和 REAR 侧轴靠近,并使 FRONT 侧的
机械止动器和 REAR 侧的机械止动器之间的间隙调整为 1mm。
2. 此时,为了使干涉 PH 置于 ON,调整干涉传感器 DOG 的位置。
=基准值=
FRONT 机械止动器和 REAR 机械止动器之间的间隙: 1mm
1
干涉传感器挡板
(图 1)
F側メカストッパ
R側メカストッパ
F側メカストッパ
R側メカストッパ
R
侧
机械止动器
F
侧
机械止动器
干涉传感器挡板