KE-3010A_机器控制参数.pdf - 第36页
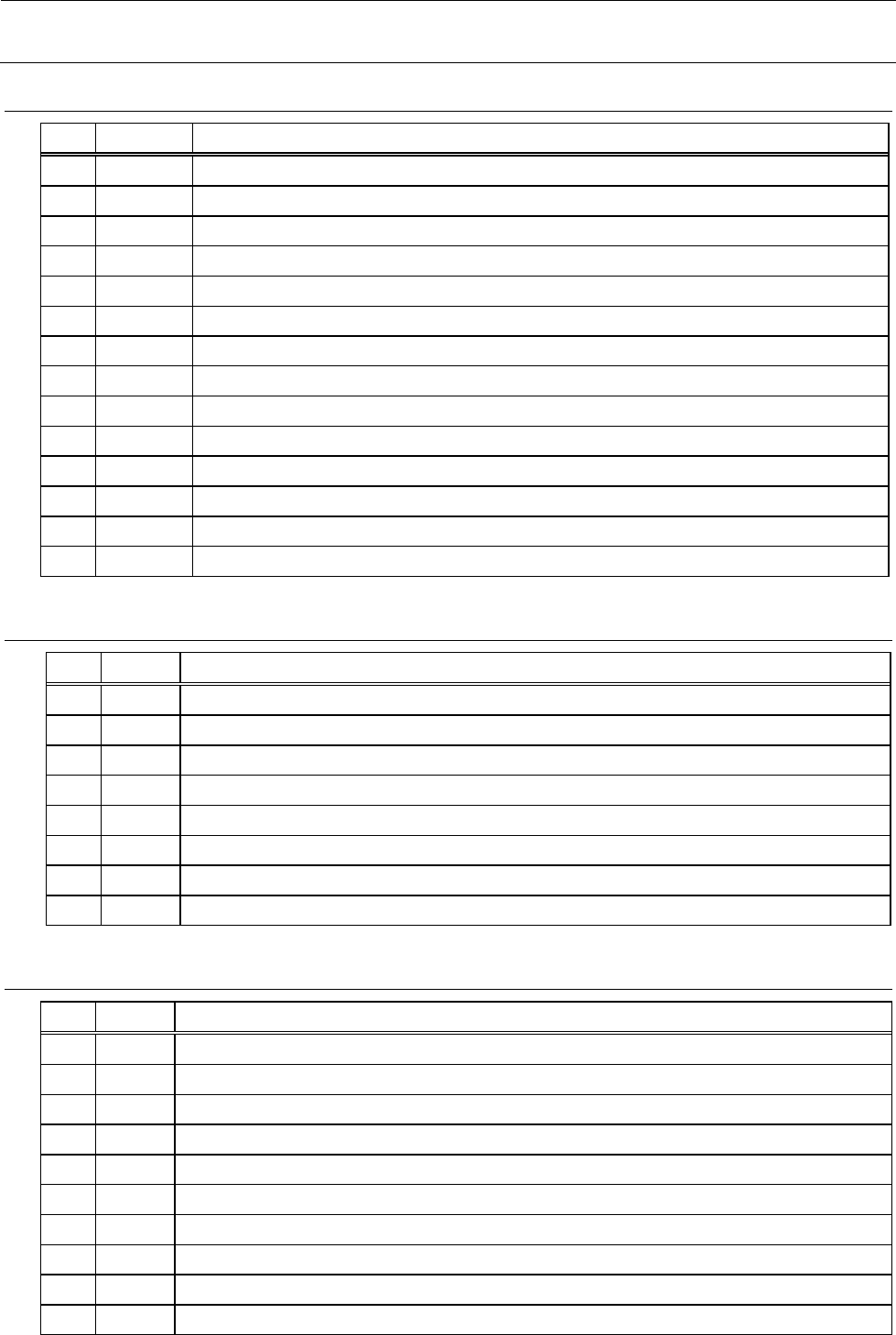
机器控制参数 2- 27 2-2-4-2 动作区分 ( Y 轴) 2-2-4-3 增益表索引(转换高速 ) No. 类别 内容 1 0 使用标准增益 Pr126 ~ Pr129 2 1 增益表 1 位置控制增益(使用伺服参数的 Pr1c0 ~ Pr1c 2 ) 3 2 增益表 2 位置控制增益(使用伺服参数的 Pr1c3 ~ Pr1c 5 ) 4 3 增益表 3 位置控制增益(使用伺服参数的 Pr1c6 ~ Pr1c8 ) 5 4 增益…
机器控制参数
2-26
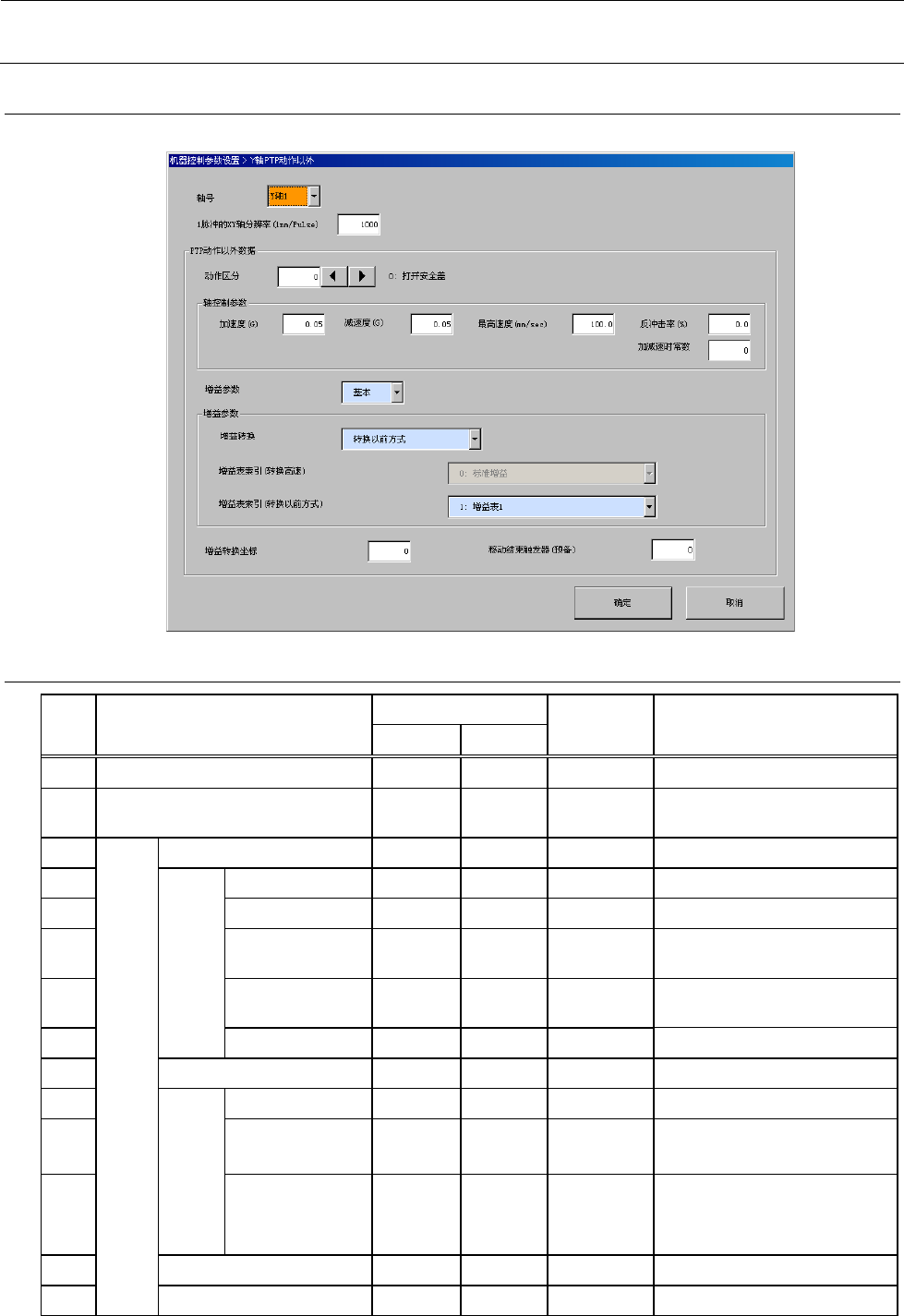
2-2-4 Y
轴
PTP
动作以外
如将“动作区分”设置为欲编辑的索引,即可对所设定的区分中的軸控制参数进行编辑。
2-2-4-1
设定项目
No.
项目
输入范围
单位
备考
最小值
最大值
1
轴号
1
2
Y
轴
1
、
Y
轴
2
2
1脉冲的XY轴分辨率
1nm/Puls
e
3
PTP
动作
数据
动作区分
0 14
参照 2-2-4-2 动作区分
4
轴控
制参
数
加速度
-10 10 G
5
减速度
-10
10
G
6
最高速度
-10000
0
100000 mm/sec
7
反冲击率
-10000
0
100000 %
8
加减速时常数
9
增益参数
0 1
基本、扩展
10
增益
参数
增益转换
0
1
高速转换、以前的方式转换
11
增益表索引
(高速转换)
0
8
参照2-2-4-3增益表索引
(转换高速)※
12
增益转换坐标
(以前的方式
转换)
0 9
参照2-2-4-4增益表索引
(转换以前方式)※
13
增益转换坐标
14
移动结束触发器(预备
)
机器控制参数
2-27
2-2-4-2
动作区分(
Y
轴)
2-2-4-3
增益表索引(转换高速)
No.
类别
内容
1
0
使用标准增益
Pr126
~
Pr129
2 1
增益表 1 位置控制增益(使用伺服参数的Pr1c0~Pr1c2)
3 2
增益表 2 位置控制增益(使用伺服参数的Pr1c3~Pr1c5)
4
3
增益表
3
位置控制增益(使用伺服参数的
Pr1c6
~
Pr1c8
)
5 4
增益表 4 位置控制增益(使用伺服参数的Pr1c9~Pr1cb)
6
5
增益表
5
位置控制增益(使用伺服参数的
Pr1cc
~
Pr1ce
)
7 6
增益表 6 位置控制增益(使用伺服参数的Pr1cf~Pr1d1)
8 7
增益表 7 位置控制增益(使用伺服参数的Pr1d2~Pr1d4)
2-2-4-4
增益表索引(转换以前方式)
No.
类别
内容
1
0
打开安全盖
2 1
JOG基础属性
3 2
单步
4
3
返回原点
5 4
共面检测低速扫描
6
5
共面检测高速扫描
7 6
共面检测分割移动
8 7
共面检测高速扫描2
9
8
S-VCS
扫描
1
10
9
S-VCS扫描2
11
10
S-VCS
扫描
3
12
11
S-VCS扫描4
13
12
S-VCS扫描5
14
13
~
14
预备
No.
类别
内容
1 0
增益表 0
2
1
增益表
1
3 2
增益表 2
4
3
增益表
3
5 4
增益表 4
6 5
增益表 5
7
6
增益表
6
8 7
增益表 7
9
8
增益表
8
10 9
增益表 9
机器控制参数
2-28
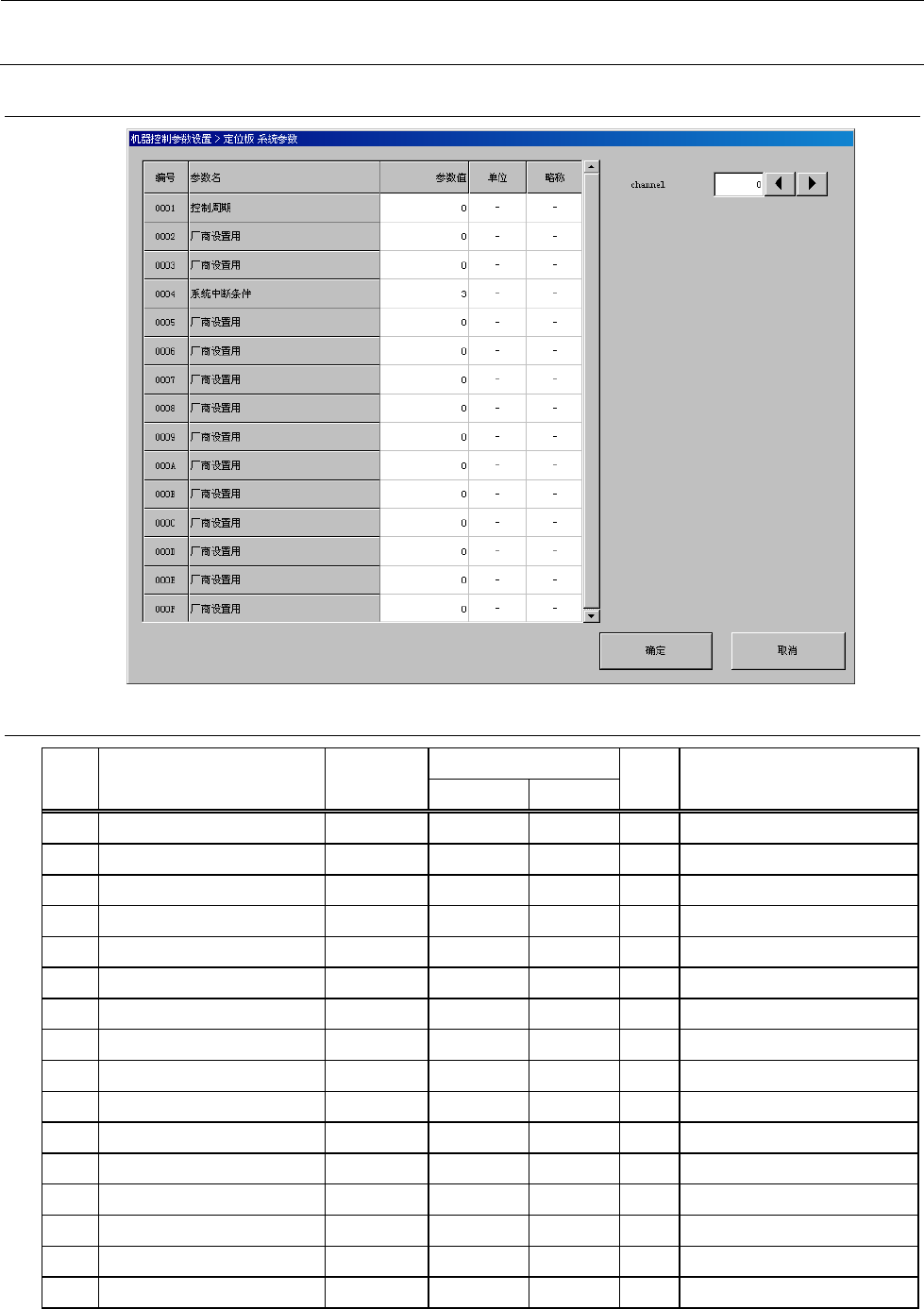
2-2-5
系统参数
2-2-5-1
设定项目
No.
项目
Symbol
输入范围
单位
备考
最小值
最大值
1
设置
0 1
2
控制周期
CLK
Pr.No 001
3
厂商设置用
Pr.No 002
4
厂商设置用
Pr.No 003
5
系统中断条件
SITM
Pr.No 004
6
厂商设置用
Pr.No 005
7
厂商设置用
Pr.No 006
8
厂商设置用
Pr.No 007
9
厂商设置用
Pr.No 008
10
厂商设置用
Pr.No 009
11
厂商设置用
Pr.No 00A
12
厂商设置用
Pr.No 00B
13
厂商设置用
Pr.No 00C
14
厂商设置用
Pr.No 00D
15
厂商设置用
Pr.No 00E
16
厂商设置用
Pr.No 00F