KE-3010A_机器控制参数.pdf - 第49页
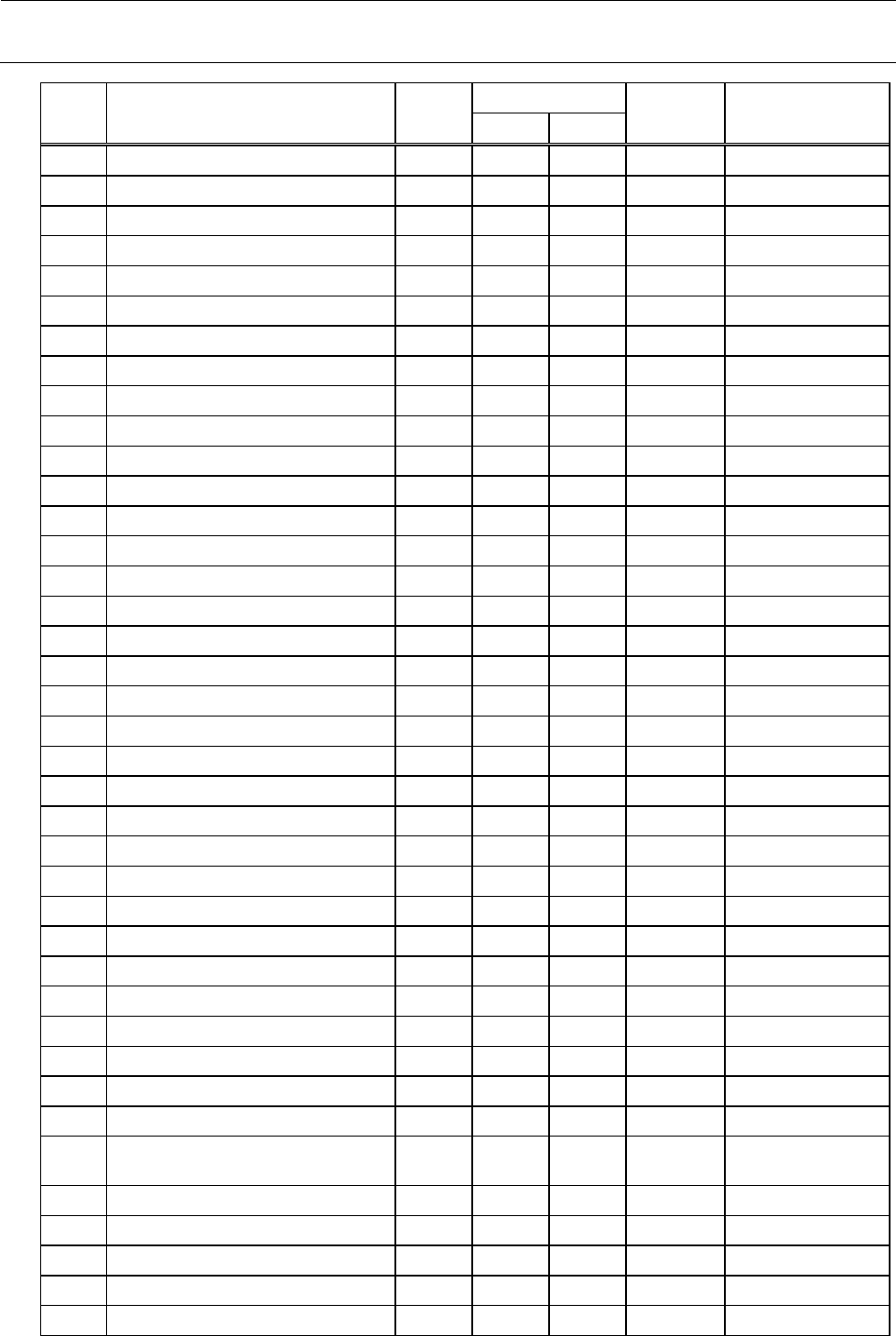
机器控制参数 2- 40 No. 项目 Sym b ol 输入范围 单位 备考 最小值 最大值 96 厂商设置用 Pr.No 272 97 厂商设置用 Pr.No 273 98 厂商设置用 Pr.No 274 99 厂商设置用 Pr.No 275 100 厂商设置用 Pr.No 276 101 厂商设置用 Pr.No 277 102 厂商设置用 Pr.No 278 103 厂商设置用 Pr.No 279 104 厂商设置用 Pr.No …
机器控制参数
2-39
No.
项目
Symb
ol
输入范围
单位
备考
最小值
最大值
57
返回原点减速时常数
ZTCD Pr.No 245
58
原点坐标
IZPS
Pr.No 246
59
原点偏移量
IZST
Pr.No 248
60
原点检索限度
IZL Pr.No 24A
61
Creep
速度
CRF
Pr.No 24C
62
原点多圈旋转数据
nLSO
Pr.No 24D
63
原点
1
圈旋转位置
ICYO
Pr.No 24E
64
厂商设置用
Pr.No 250
65
厂商设置用
Pr.No 251
66
厂商设置用
Pr.No 252
67
厂商设置用
Pr.No 253
68
厂商设置用
Pr.No 254
69
厂商设置用
Pr.No 255
70
厂商设置用
Pr.No 256
71
厂商设置用
Pr.No 257
72
厂商设置用
Pr.No 258
73
厂商设置用
Pr.No 259
74
厂商设置用
Pr.No 25A
75
厂商设置用
Pr.No 25B
76
厂商设置用
Pr.No 25C
77
厂商设置用
Pr.No 25D
78
厂商设置用
Pr.No 25E
79
厂商设置用
Pr.No 25F
80
插入直线组号
LGRP Pr.No 260
81
插入直线选项
LOP
Pr.No 261
82
插入直线速度限制值
ILSL
Pr.No 262
83
并列驱动组
TGRP
Pr.No 264
84
并列驱动选项
TOP Pr.No 265
85
並列驱动同步有効幅
nTEV Pr.No 266
86
並列驱动同步速度
TES
Pr.No 267
87
並列驱动偏差过大幅
TEO Pr.No 268
88
並列驱动轴单位倍率
TMAG
Pr.No 269
89
并列驱动偏差查出过大开始延迟
nTED Pr.No 26A
90
并列驱动偏移校正允许幅
nTOF
L
Pr.No 26B
91
並列驱动原点信号偏移量
ITZOF
Pr.No 26C
92
厂商设置用
Pr.No 26E
93
厂商设置用
Pr.No 26F
94
厂商设置用
Pr.No 270
95
厂商设置用
Pr.No 271
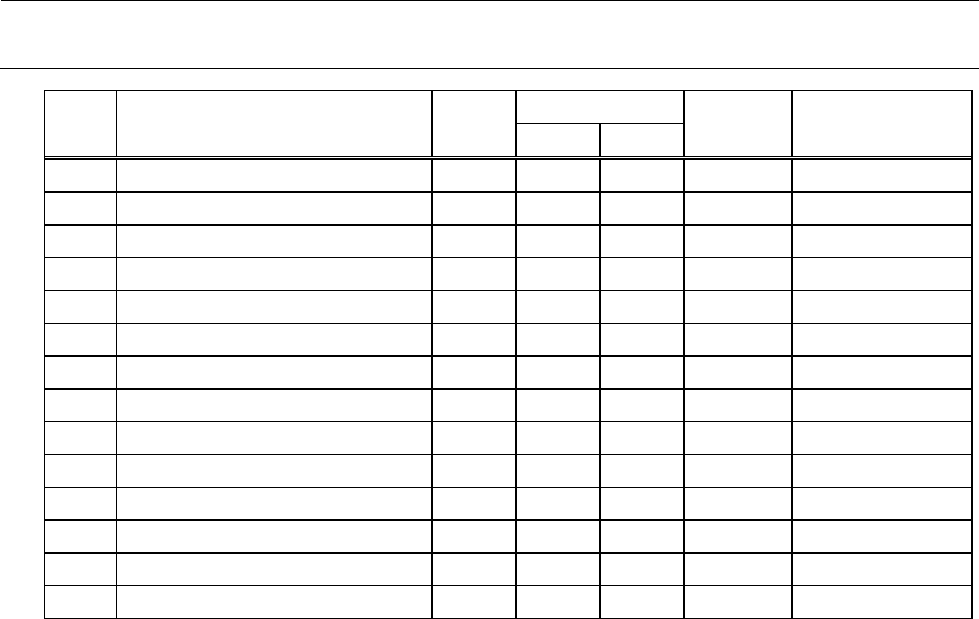
机器控制参数
2-40
No.
项目
Symb
ol
输入范围
单位
备考
最小值
最大值
96
厂商设置用
Pr.No 272
97
厂商设置用
Pr.No 273
98
厂商设置用
Pr.No 274
99
厂商设置用
Pr.No 275
100
厂商设置用
Pr.No 276
101
厂商设置用
Pr.No 277
102
厂商设置用
Pr.No 278
103
厂商设置用
Pr.No 279
104
厂商设置用
Pr.No 27A
105
厂商设置用
Pr.No 27B
106
厂商设置用
Pr.No 27C
107
厂商设置用
Pr.No 27D
108
厂商设置用
Pr.No 27E
109
厂商设置用
Pr.No 27F
机器控制参数
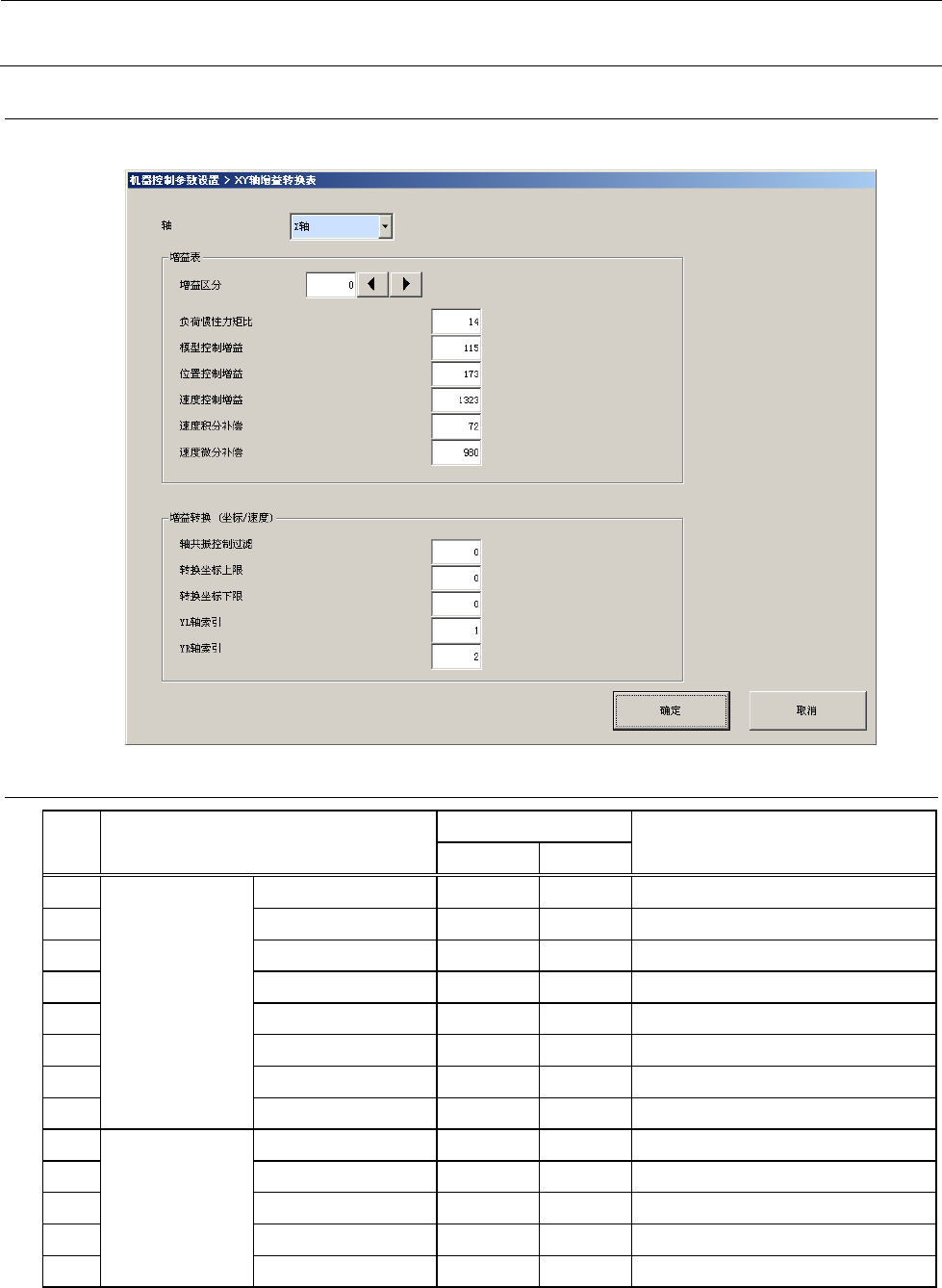
2-41
2-2-8 XY
轴增益转换表
在已经选择的轴中将显示适当的增益转换数据。
2-2-8-1
设定项目
No.
项目
输入范围
备考
最小值
最大值
1
增益表 轴
2
增益区分
0
9
X轴、Y轴、θ轴
3
负荷惯性力矩比
0
65535
4
模型控制增益
0
65535
5
位置控制增益
0 65535
6
速度控制增益
0
65535
7
速度积分补偿
0
65535
8
速度微分补偿
0
65535
9
增益转换
(坐标/速度)
轴共振控制过滤
0
65535
10
转换坐标上限
0 65535
11
转换坐标下限
0
65535
12
YL轴索引
0
65535
13
YR
轴索引
0
65535