TCM-X110_X210_X300(D) 2_Operation(Supervisor).pdf - 第174页
0 3 08 -0 01 5 - 35 3 . 4 3 . 4 3 . 4 3 . 4 3 . 4 “ 运 行 方 式 设 定 运 行 方 式 设 定 运 行 方 式 设 定 运 行 方 式 设 定 运 行 方 式 设 定 ” T a b T a b T a b T a b T a b * 7 * 7 * 7 * 7 * 7 决 定 角 度 方 式 决 定 角 度 方 式 决 定 角 度 方 式 决 定 角 度 方 式 决 定 角 度 …

(b) “ 待机位置移动 ” 是以本公司服务人员进行特殊维
护保养作业为前提的机能。因料车超常高速移动,
为确保维护保养时操作员的安全而设计了此机能,
通常的维护保养中负荷电源被切断,因此 “ 待机位
置移动 ” 设定,不存在安全上的问题。
减 速 指 定减 速 指 定
减 速 指 定减 速 指 定
减 速 指 定
设定料车的最 高移动速度。
[[
[[
[
标准标准
标准标准
标准
]]
]]
]
按钮按钮
按钮按钮
按钮
最高速度为 2 m / 秒。
[[
[[
[
减速减速
减速减速
减速
]]
]]
]
按钮按钮
按钮按钮
按钮
最高速度为 0 . 5 m/ 秒。
* 6* 6
* 6* 6
* 6
X YX Y
X YX Y
X Y
工作台动作设定工作台 动作设定
工作台动作设定工作台 动作设定
工作台动作 设定
减 速 范 围 指 定减 速 范 围 指 定
减 速 范 围 指 定减 速 范 围 指 定
减 速 范 围 指 定
就 X Y 工作台的减速动作范围,设定 “ 标准 ” 或是 “ 限定于外形基
准线路板 ” 。
请按要设定的一侧按钮。
[[
[[
[
标准标准
标准标准
标准
]]
]]
]
按钮按钮
按钮按钮
按钮
使用孔基准时设定。
[[
[[
[
限定于外 形基 准线 路板限定于外形 基准 线路板
限定于外 形基 准线 路板限定于外形 基准 线路板
限定 于外形 基准线 路板
]]
]]
]
按钮按钮
按钮按钮
按钮
使用外形 基准时设定。
由于没有孔基准针部的限 制,可通过缩小减速范围来缩短
单位线路板的生产 时间。
如有意不启动送料器替代作用时,请设定为 “ 不使用 ” 。
3 . 43 . 4
3 . 43 . 4
3 . 4 “
运行方式设定运行方式设定
运行方式设定运行方式设定
运行方式设定 ”
T a bT a b
T a bT a b
T a b
0308-001 5-34
0308-001 5-35
3 . 43 . 4
3 . 43 . 4
3 . 4 “
运行方式设定运行方式设定
运行方式设定运行方式设定
运行方式设定 ”
T a bT a b
T a bT a b
T a b
* 7* 7
* 7* 7
* 7
决 定 角 度 方 式决 定 角 度 方 式
决 定 角 度 方 式决 定 角 度 方 式
决 定 角 度 方 式
进行元件贴装动作时直接传达安装头的角度定位方法的设定。
[[
[[
[
标准标准
标准标准
标准
]]
]]
]
按钮按钮
按钮按钮
按钮
向接近贴装角度 方向旋转 安装头。
贴装角度为 0 ~1 8 0 时,逆时针旋转安装头。
贴装角度为 1 8 1 ~3 6 0 时,顺时针旋转安装头。
是俯视安装头的角度。
[[
[[
[
旋转方向优先旋转方 向优先
旋转方向优先旋转方 向优先
旋转方向优 先
]]
]]
]
按钮按钮
按钮按钮
按钮
不考虑贴装角度,通常逆时针旋转安装头。
虽可以获得更高精密度的贴装,但也发生变速限制。
* 8* 8
* 8* 8
* 8
[[
[[
[
后一页后一页
后一页后一页
后一页
]]
]]
]
按钮按钮
按钮按钮
按钮
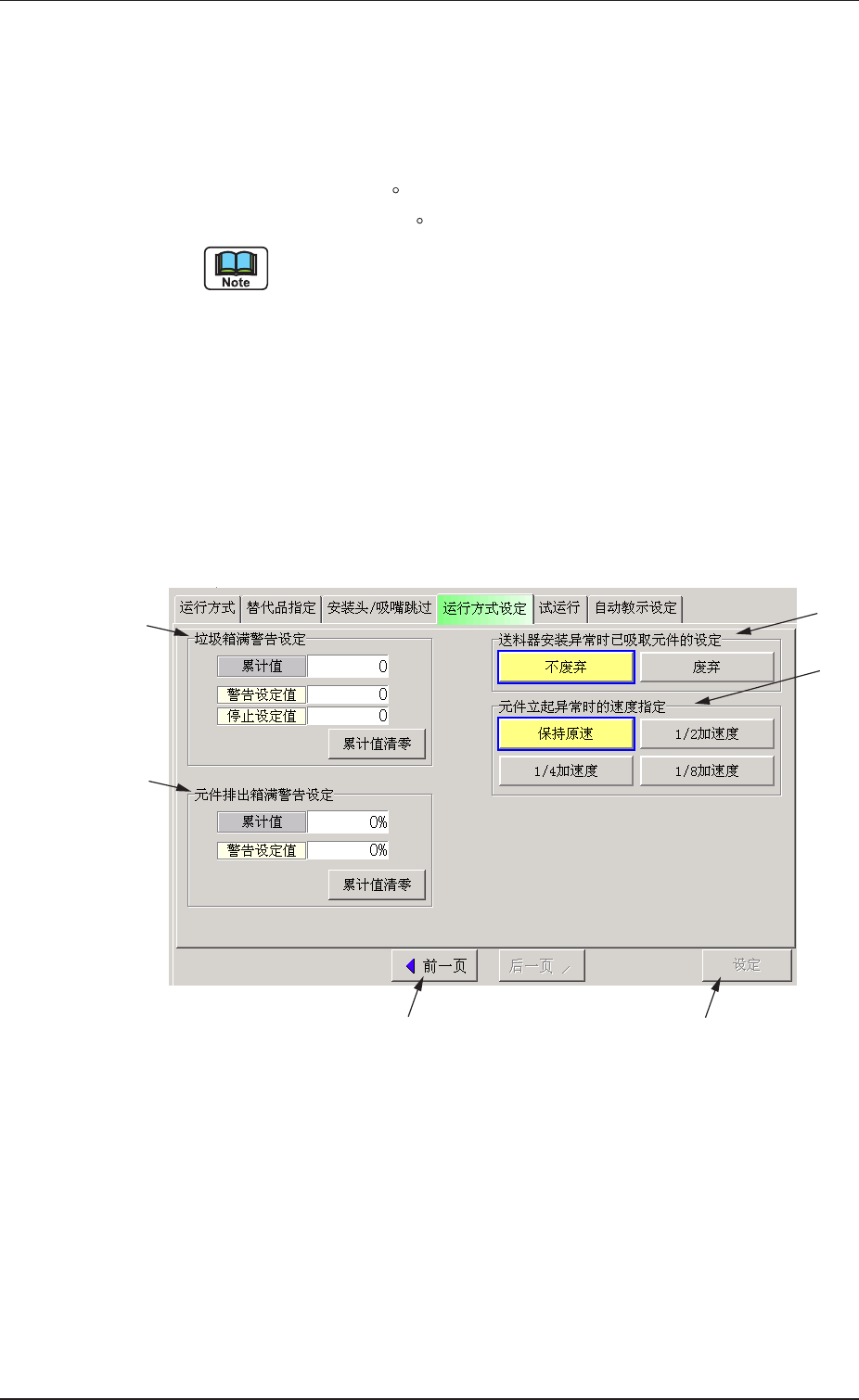
切换到显示垃圾箱满的累计值、警告设定值、停止设定值的页
面 。
F i g . 2 E 2 1F i g . 2 E 2 1
F i g . 2 E 2 1F i g . 2 E 2 1
F i g . 2 E 2 1 “
运行方式设定运行方式设定
运行方式设定运行方式设定
运行方式设定 ”
选项卡选项卡
选项卡选项卡
选项卡
* 9* 9
* 9* 9
* 9
* 1 0* 1 0
* 1 0* 1 0
* 1 0
* 1 1* 1 1
* 1 1* 1 1
* 1 1
* 1 2* 1 2
* 1 2* 1 2
* 1 2
* 1 3* 1 3
* 1 3* 1 3
* 1 3
* 1 4* 1 4
* 1 4* 1 4
* 1 4

* 9* 9
* 9* 9
* 9
垃 圾 箱 满 警 告 设 定垃 圾 箱 满 警 告 设 定
垃 圾 箱 满 警 告 设 定垃 圾 箱 满 警 告 设 定
垃 圾 箱 满 警 告 设 定
显示垃圾箱计数的累计值、警告设定值、停止设定值。
累 计 值累 计 值
累 计 值累 计 值
累 计 值
::
::
: 显示装置在 生产过程中进行 的垃圾计数。
垃圾计数完毕在贴装完 1 线路板的时点进行。
因此,垃 圾计数包括如下误差。
(a) 不包括替代品机能、补装动作、发生元件断料时的
垃圾数。
(b) 装置处于 “ 传送暂停 ” 状态下进行系统归零处理时,
忽略该线路板 暂停之前切割的垃圾数。
(c) 从中间步骤继续运行时,在线路板贴装完的时点作
为 1 线路板的垃圾数进行计数。
3 . 43 . 4
3 . 43 . 4
3 . 4 “
运行方式设定运行方式设定
运行方式设定运行方式设定
运行方式设定 ”
T a bT a b
T a bT a b
T a b
0308-001 5-36
警 告 设 定 值警 告 设 定 值
警 告 设 定 值警 告 设 定 值
警 告 设 定 值 :显 示满箱警告的计数。
停 止 设 定 值停 止 设 定 值
停 止 设 定 值停 止 设 定 值
停 止 设 定 值 :显示因清扫灰尘箱( 除去垃圾箱) 而停止生产运行
的计数。
垃圾箱满 警告 的警 告设定 值及 停止 设定值 在 “ 运行参
数 ” 选项卡上设定。
[[
[[
[
累计值清除累计值清除
累计值清除累计值清除
累计值清除
]]
]]
]
按钮按钮
按钮按钮
按钮
: 清扫灰尘箱、清除垃 圾后,请 按该按钮。
单击按钮,确认是否能清除累计值。单击[ 是] 按钮,
累计值清除为 0 。