TCM-X110_X210_X300(D) 2_Operation(Supervisor).pdf - 第357页
5 . 5 5 . 5 5 . 5 5 . 5 5 . 5 “ 线 路 板 认 识 照 相 机 线 路 板 认 识 照 相 机 线 路 板 认 识 照 相 机 线 路 板 认 识 照 相 机 线 路 板 认 识 照 相 机 ” T a b T a b T a b T a b T a b 进 行 线 路 板 认 识 照 相 机 的 教 示 。 使 用 夹 具 线 路 板 , 自 动 计 算 出 线 路 板 认 识 照 相 机 ( 照 相 …
0308-001 6-113
* 4* 4
* 4* 4
* 4
异 常 数 以 及异 常 数 以 及
异 常 数 以 及异 常 数 以 及
异 常 数 以 及
[[
[[
[
教 示 异 常 信 息教 示 异 常 信 息
教 示 异 常 信 息教 示 异 常 信 息
教 示 异 常 信 息
]]
]]
]
按 钮按 钮
按 钮按 钮
按 钮
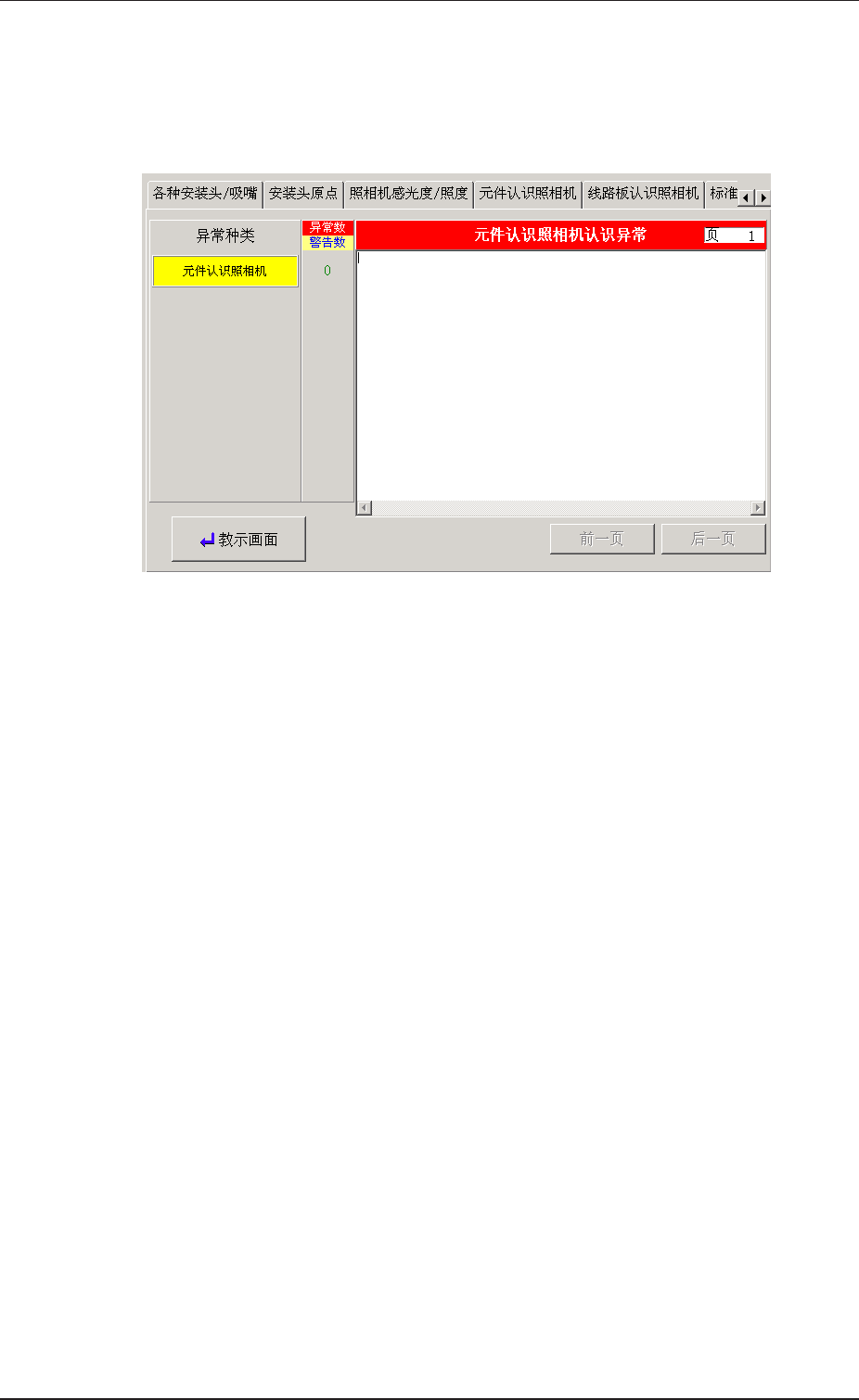
教示结果有异 常时,显示认识异常数。
按[ 教示异常信息] 按钮,显示
“
元件认识照相机认识异常
”
界
面 。
F i g . 2 F 9 2 F i g . 2 F 9 2
F i g . 2 F 9 2 F i g . 2 F 9 2
F i g . 2 F 9 2 “
元件认识照相机认识异常元件认识照相机认识异常
元件认识照相机认识异常元件认识照相机认识异常
元件认识照相机认识异常 ”
界面界面
界面界面
界面
确认异常内容,调整照相机感光度以及照度,进行再一次的教
示 。
按[ 教示画面] 按钮,返回至 “ 元件认识照相 ” 选项卡。
* 5* 5
* 5* 5
* 5
[[
[[
[
中断中断
中断中断
中断
]]
]]
]
按钮按钮
按钮按钮
按钮
中断教示。
* 6* 6
* 6* 6
* 6
[[
[[
[
结束结束
结束结束
结束
]]
]]
]
按钮按钮
按钮按钮
按钮
结束教示动作 。
* 7* 7
* 7* 7
* 7
控 制 开 关控 制 开 关
控 制 开 关控 制 开 关
控 制 开 关
按下教示选择按钮,按下动作[ O N ] 按钮后,2 秒内再按操作台
的[ E N A B L E ] 按钮,实行按钮中显示的动作。
5 . 45 . 4
5 . 45 . 4
5 . 4 “
元件元件
元件元件
元件
认 识认 识
认 识认 识
认 识
照相机照相机
照相机照相机
照相机 ”
T a bT a b
T a bT a b
T a b
5 . 55 . 5
5 . 55 . 5
5 . 5 “
线路板认识照相机线路板认识照相机
线路板认识照相机线路板认识照相机
线路板认识照相机 ”
T a bT a b
T a bT a b
T a b
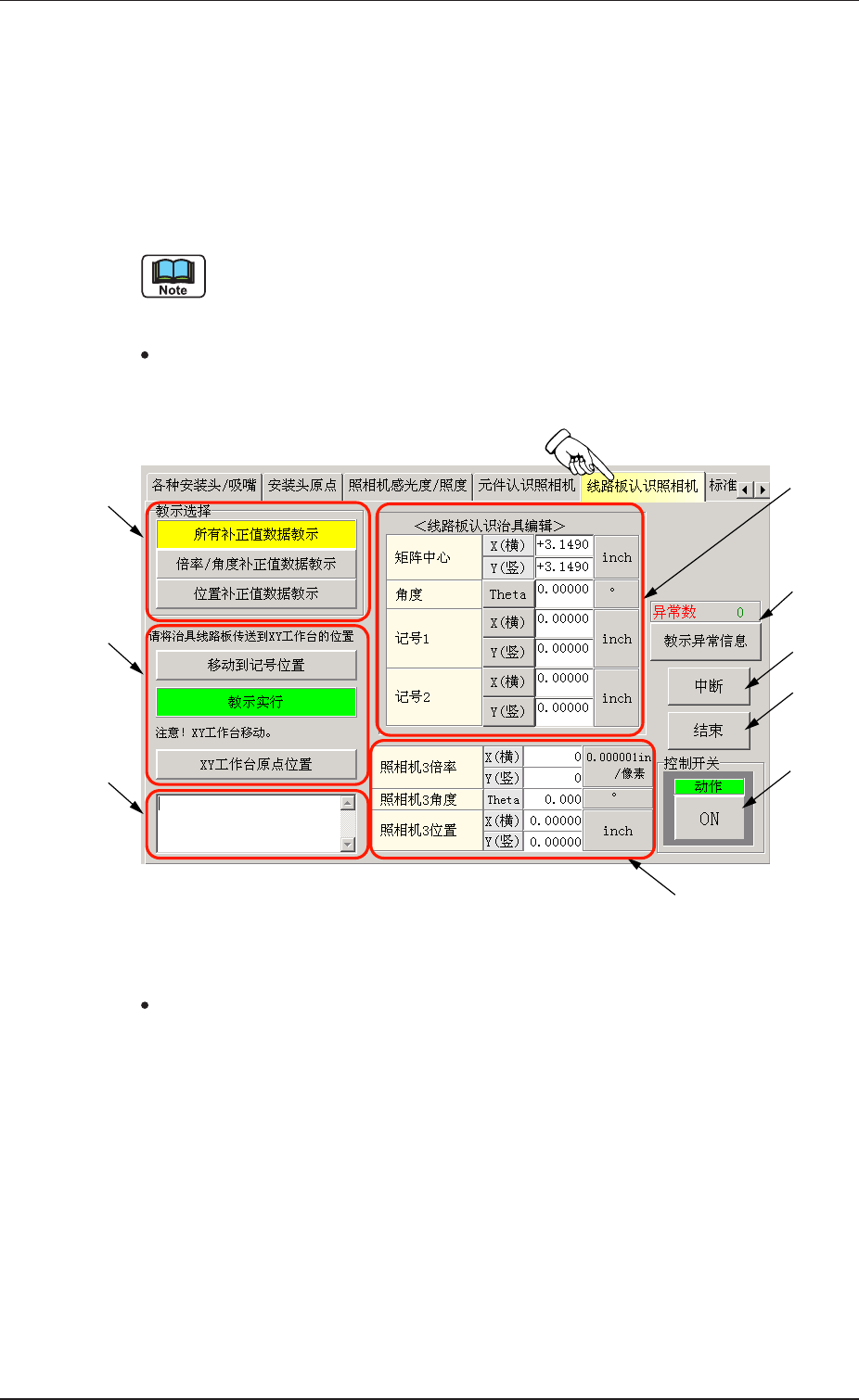
进行线路板认 识照相机 的教示。
使用夹具线路板,自动计算出线路板认识照相机( 照相机 3 ) 的补正
值 X 、Y 、Z 和照相机倍率 X 、Y ,并反馈到线路板认识照相机的补正
值数据的机能。
此教示为服务员专用。
详细情况 请咨询本公司服务部。
页 面 显 示页 面 显 示
页 面 显 示页 面 显 示
页 面 显 示
在 “ 教示操作 ” 子菜单界面按[ 线路板认识照相机] T a b 时,将显示
如下选项卡。
F i g .2 F 9 3 F i g .2 F 9 3
F i g .2 F 9 3 F i g .2 F 9 3
F ig . 2 F 9 3 “
线路板线路板
线路板线路板
线路板
认识认识
认识认识
认识
照相机照相机
照相机照相机
照相机 ”
选项卡选项卡
选项卡选项卡
选项卡
0308-001 6-114
5 . 55 . 5
5 . 55 . 5
5 . 5 “
线路板线 路 板
线路板线 路 板
线路板
认识认识
认识认识
认识
照相机照 相机
照相机照 相机
照相机 ”
T a bT a b
T a bT a b
T a b
* 1* 1
* 1* 1
* 1
* 5* 5
* 5* 5
* 5
* 7* 7
* 7* 7
* 7
* 8* 8
* 8* 8
* 8
* 9* 9
* 9* 9
* 9
* 2* 2
* 2* 2
* 2
* 4* 4
* 4* 4
* 4
* 3* 3
* 3* 3
* 3
页 面 构 成页 面 构 成
页 面 构 成页 面 构 成
页 面 构 成
* 1* 1
* 1* 1
* 1
教 示 选 择 按 钮教 示 选 择 按 钮
教 示 选 择 按 钮教 示 选 择 按 钮
教 示 选 择 按 钮
排列有以下多个按钮。
[[
[[
[
所有 补正值 数据教示所 有补正 值数据 教示
所有 补正值 数据教示所 有补正 值数据 教示
所有补正值 数据教示
]]
]]
]
按钮按钮
按钮按钮
按钮
进行有关线路板认识照相机的所有补正值教示。
[[
[[
[
倍率倍率
倍率倍率
倍率
//
//
/
角度角度
角度角度
角度
补正值数据教 示补正值数据 教示
补正值数据教 示补正值数据 教示
补正值数据教示
]]
]]
]
按钮按钮
按钮按钮
按钮
进行有关线路板认识照相机的倍率和角度补正值数据教示。
[[
[[
[
位置位置
位置位置
位置
补正 值数 据教示补正值数 据教示
补正 值数 据教示补正值数 据教示
补正值数 据教示
]]
]]
]
按钮按钮
按钮按钮
按钮
进行有关线路板认识照相机的位置补正值数据教示。
* 6* 6
* 6* 6
* 6
* 2* 2
* 2* 2
* 2
操作选择按钮操作选择按钮
操作选择按钮操作选择按钮
操作选择按钮
操作按钮和作 业指示的顺序如下。
请 将冶 具 线路 板传 送 到请将 冶 具线 路板 传 送到
请 将冶 具 线路 板传 送 到请将 冶 具线 路板 传 送到
请将冶 具线 路 板传 送 到
X YX Y
X YX Y
X Y
工作台 的位 置 。工 作 台的 位置 。
工作台 的位 置 。工 作 台的 位置 。
工 作台 的 位置 。
[[
[[
[
移动到记 号位置移动到记 号位置
移动到记 号位置移动到记 号位置
移动到记 号位置
]]
]]
]
按钮按钮
按钮按钮
按钮
[[
[[
[
教示实行教示实行
教示实行教示实行
教示实行
]]
]]
]
按钮按钮
按钮按钮
按钮
注意注意
注意注意
注意
: X Y: X Y
: X Y: X Y
: X Y
工作台移动。工作台移动。
工作台移动。工作台移动。
工作台移动。
[[
[[
[
X YX Y
X YX Y
X Y
工作工作
工作工作
工作
台原点位置台原点位置
台原点位置台原点位置
台原点位置
]]
]]
]
按钮按钮
按钮按钮
按钮
* 3* 3
* 3* 3
* 3
教 示 数 据 显 示教 示 数 据 显 示
教 示 数 据 显 示教 示 数 据 显 示
教 示 数 据 显 示
装置显示执行教示时自动计算 出的数据。
* 4* 4
* 4* 4
* 4
情 况 表 示情 况 表 示
情 况 表 示情 况 表 示
情 况 表 示
显示教示情况。
* 5* 5
* 5* 5
* 5
线 路 板 识 别 冶 具 编 辑线 路 板 识 别 冶 具 编 辑
线 路 板 识 别 冶 具 编 辑线 路 板 识 别 冶 具 编 辑
线 路 板 识 别 冶 具 编 辑
输入 J G - 0 0 8 6 线路板识别冶具值。
5 . 55 . 5
5 . 55 . 5
5 . 5 “
线路板线 路 板
线路板线 路 板
线路板
认识认识
认识认识
认识
照相机照 相机
照相机照 相机
照相机 ”
T a bT a b
T a bT a b
T a b
0308-001 6-115
* 6* 6
* 6* 6
* 6
异 常数 以 及异常数 以及
异 常数 以 及异常数 以及
异常数 以及
[[
[[
[
教示异 常信 息教 示 异常 信息
教示异 常信 息教 示 异常 信息
教 示异 常信 息
]]
]]
]
按钮按钮
按钮按钮
按钮
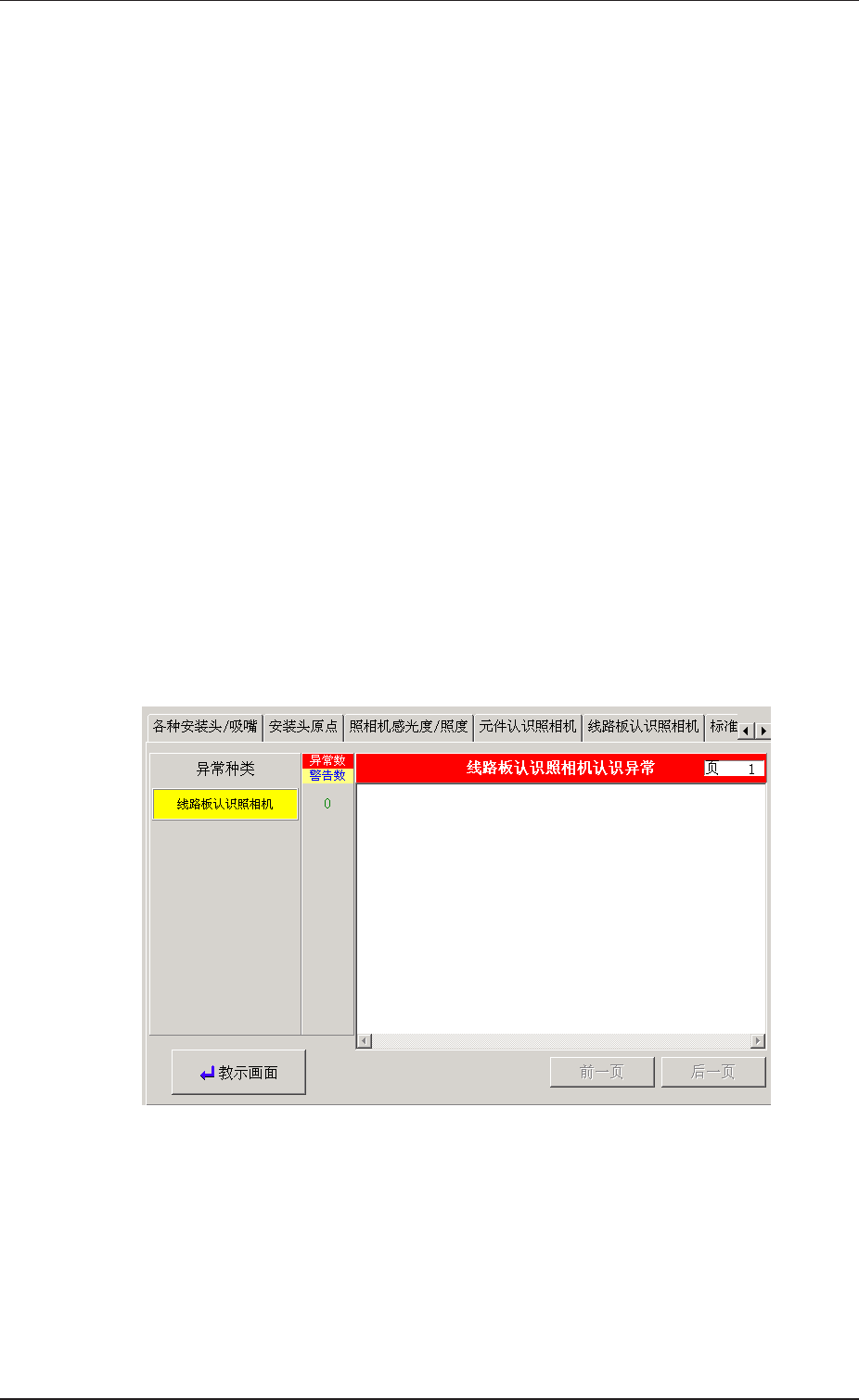
教示结果有异 常时,显示认识异常数。
按[ 教示异常信息] 按钮,显示
“
线路板认识照相机认识异常
”
界面 。
F i g .2 F 9 4 F i g .2 F 9 4
F i g .2 F 9 4 F i g .2 F 9 4
F ig . 2 F 9 4 “
线路板认识照相机认识异常线路板认识照相机认识异常
线路板认识照相机认识异常线路板认识照相机认识异常
线路板认识照相机认识异常 ”
界面界面
界面界面
界面
确认异常内容,调整照相机感光度以及照度,进行再一次的教
示 。
按[ 教示画面] 按钮,返回至 “ 线路板认识照相机 ” 选项卡。