TCM-X110_X210_X300(D) 2_Operation(Supervisor).pdf - 第255页
2 .2. 4 2 .2 .4 2 .2. 4 2 .2 .4 2. 2.4 “ 线 路 板 搬 送 线 路 板 搬 送 线 路 板 搬 送 线 路 板 搬 送 线 路 板 搬 送 ” T a b T a b T a b T a b T a b 进 行 线 路 板 的 搬 送 操 作 。 页 面 显 示 页 面 显 示 页 面 显 示 页 面 显 示 页 面 显 示 在 “ 手 动 操 作 ” 选 项 卡 中 , 按 [ 线 路 板 搬…
2.2.32.2.3
2.2.32.2.3
2.2.3 “
制动阀制动阀
制动阀制动阀
制动阀 ”
T a bT a b
T a bT a b
T a b
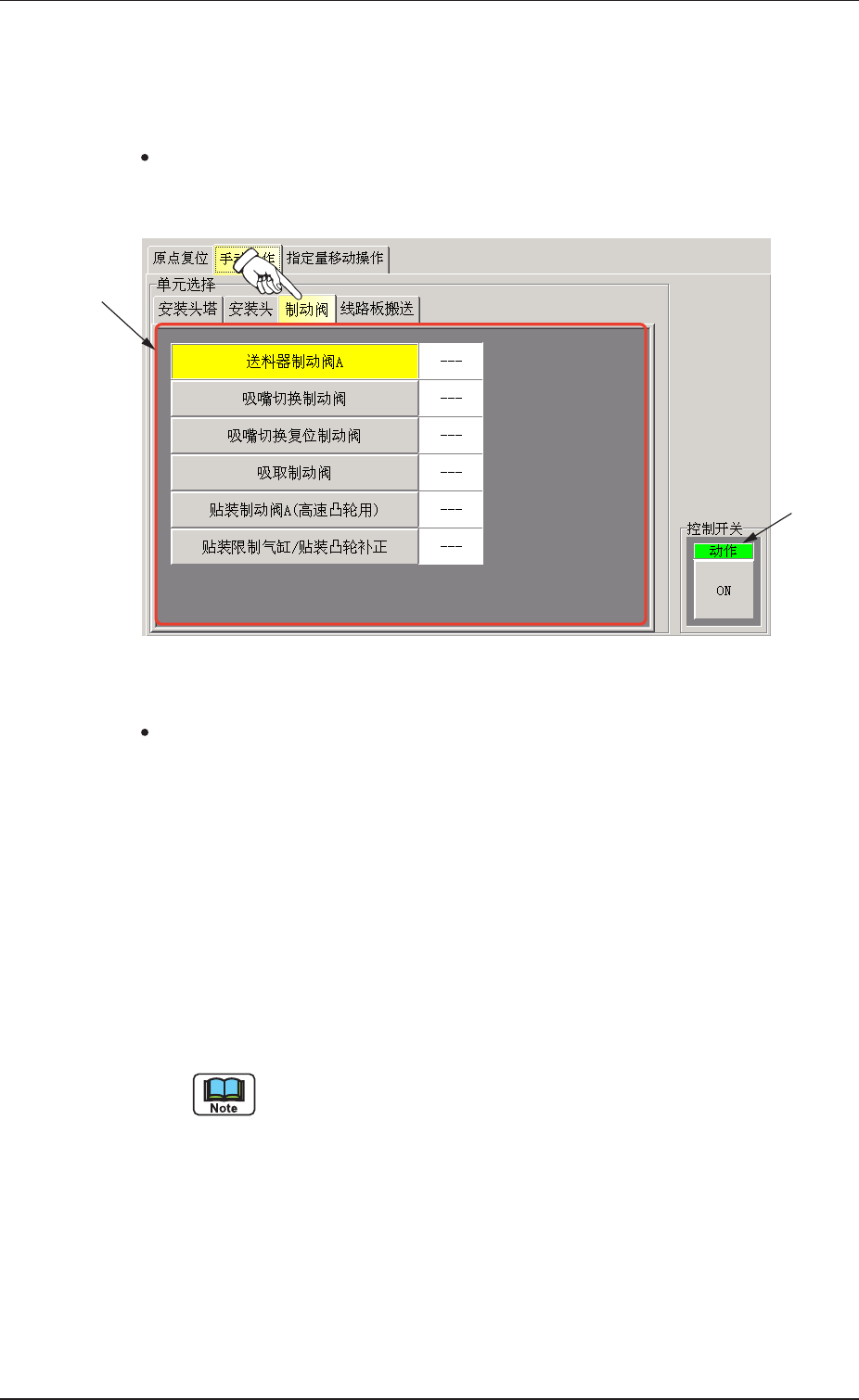
进行制动阀的 O N / O F F 操作。
页 面 显 示页 面 显 示
页 面 显 示页 面 显 示
页 面 显 示
在 “ 手动操作 ” 选项卡中,按[ 制动阀] T a b 时,显示如下选项卡。
F i g . 2 F 8F i g . 2 F 8
F i g . 2 F 8F i g . 2 F 8
F i g . 2 F 8 “
制动阀制动阀
制动阀制动阀
制动阀 ”
选项卡选项卡
选项卡选项卡
选项卡
页 面 构 成页 面 构 成
页 面 构 成页 面 构 成
页 面 构 成
* 1* 1
* 1* 1
* 1
制 动 阀 选 择 按 钮制 动 阀 选 择 按 钮
制 动 阀 选 择 按 钮制 动 阀 选 择 按 钮
制 动 阀 选 择 按 钮
[[
[[
[
送料器制动阀送料器制动阀
送料器制动阀送料器制动阀
送料器制动阀
A ]A ]
A ]A ]
A ]
按钮按钮
按钮按钮
按钮
[[
[[
[
吸嘴切换 制动阀吸嘴切换制动阀
吸嘴切换 制动阀吸嘴切换制动阀
吸嘴切换制动阀
]]
]]
]
按钮按钮
按钮按钮
按钮
[[
[[
[
吸嘴切 换复位制 动阀吸嘴 切换复位 制动阀
吸嘴切 换复位制 动阀吸嘴 切换复位 制动阀
吸嘴 切换复 位制动阀
]]
]]
]
按钮按 钮
按钮按 钮
按钮
[[
[[
[
吸取制动阀吸取制动阀
吸取制动阀吸取制动阀
吸取制动阀
]]
]]
]
按钮按钮
按钮按钮
按钮
[[
[[
[
贴装制动阀贴装制动阀
贴装制动阀贴装制动阀
贴装制动阀
A (A (
A (A (
A (
高速凸轮用高速凸轮用
高速凸轮用高速凸轮用
高速凸轮用
) ]) ]
) ]) ]
) ]
按钮按钮
按钮按钮
按钮
贴装凸 轮限 制 气 缸贴装 凸 轮限 制气缸
贴装凸 轮限 制 气 缸贴装 凸 轮限 制气缸
贴 装凸 轮 限制 气 缸
//
//
/
贴装凸 轮 补正贴 装凸 轮 补 正
贴装凸 轮 补正贴 装凸 轮 补 正
贴 装凸 轮 补正
]]
]]
]
按 钮按 钮
按 钮按 钮
按 钮
按此按钮,使其呈黄色,该制动阀被选定。
按钮右侧显示制动阀的状态 “O N ” 或 “O F F ”。
当前位置管理中或不定时,显示为 “ - - - ” 。
* 2* 2
* 2* 2
* 2
控 制 开 关控 制 开 关
控 制 开 关控 制 开 关
控 制 开 关
在
* 1* 1
* 1* 1
* 1 制动阀选择按钮中选择制动阀,按下动作[ O N ] 按钮后,2
秒内再按操作台的[ENABLE]按钮,切换以下的制动阀 “ON/OFF”
状态 。
0308-001 6-11
2 . 22 . 2
2 . 22 . 2
2 . 2 “
手动操作手动操作
手动操作手动操作
手动操作 ”
T a bT a b
T a bT a b
T a b
* 1* 1
* 1* 1
* 1
* 2* 2
* 2* 2
* 2
2.2.42.2.4
2.2.42.2.4
2.2.4 “
线路板搬送线路板搬送
线路板搬送线路板搬送
线路板搬送 ”
T a bT a b
T a bT a b
T a b
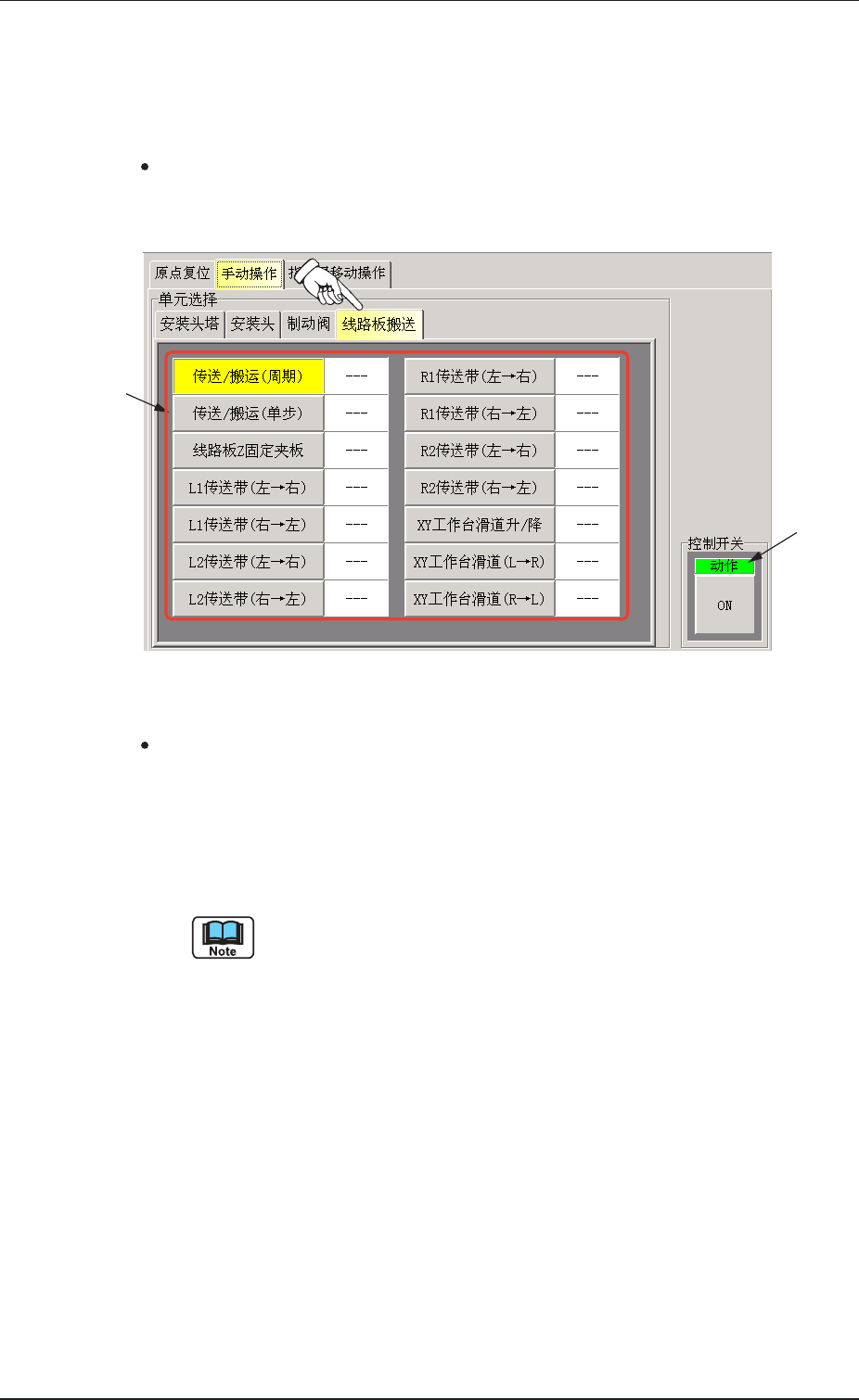
进行线路板的搬送操作。
页 面 显 示页 面 显 示
页 面 显 示页 面 显 示
页 面 显 示
在 “ 手动操作 ” 选项卡中,按[ 线路板搬送] T a b 时,显示如下选项
卡 。
F i g . 2 F 9F i g . 2 F 9
F i g . 2 F 9F i g . 2 F 9
F i g . 2 F 9 “
线路板搬送线路板搬送
线路板搬送线路板搬送
线路板搬送 ”
选项卡选项卡
选项卡选项卡
选项卡
页 面 构 成页 面 构 成
页 面 构 成页 面 构 成
页 面 构 成
* 1* 1
* 1* 1
* 1
操 作 选 择 按 钮操 作 选 择 按 钮
操 作 选 择 按 钮操 作 选 择 按 钮
操 作 选 择 按 钮
按此按钮,使其呈黄色,该操作被选定。
按钮右侧显示状态 “ 停止 ” 或 “ 动作 ” 。
当前位置管理中或不定时,显示为 “ - - - ” 。
* 2* 2
* 2* 2
* 2
控 制 开 关控 制 开 关
控 制 开 关控 制 开 关
控 制 开 关
选择操作按钮,按下动作[ O N ] 按钮后,2 秒内再按操作台的
[ E N A B L E ] 按钮,各单元做以下的动作。
[[
[[
[
传送传送
传送传送
传送
//
//
/
搬运搬运
搬运搬运
搬运
((
((
(
周期周期
周期周期
周期
) ]) ]
) ]) ]
) ]
按钮按钮
按钮按钮
按钮
做 1 个周期的线路板搬送运行。
[[
[[
[
传送传送
传送传送
传送
//
//
/
搬运搬运
搬运搬运
搬运
((
((
(
单步单步
单步单步
单步
) ]) ]
) ]) ]
) ]
按钮按钮
按钮按钮
按钮
进行线路板搬送 的步骤运行。
2 . 22 . 2
2 . 22 . 2
2 . 2 “
手动操作手动操作
手动操作手动操作
手动操作 ”
T a bT a b
T a bT a b
T a b
0308-001 6-12
* 1* 1
* 1* 1
* 1
* 2* 2
* 2* 2
* 2

线 路 板线 路 板
线 路 板线 路 板
线 路 板
ZZ
ZZ
Z
固 定 夹 板固 定 夹 板
固 定 夹 板固 定 夹 板
固 定 夹 板
线路板搬送的定位器具动作。
L 1L 1
L 1L 1
L 1
传送带传送带
传送带传送带
传送带
((
((
(
左左
左左
左→
右右
右右
右
))
))
)
按住[ E N A B L E ] 按钮的时间内,L 1 传送带继续供给动作。
L 1L 1
L 1L 1
L 1
传送带传送带
传送带传送带
传送带
((
((
(
右右
右右
右→
左左
左左
左
))
))
)
按住[ E N A B L E ] 按钮的时间内,L 1 传送带继续排出动作。
L 2L 2
L 2L 2
L 2
传送带传送带
传送带传送带
传送带
((
((
(
左左
左左
左→
右右
右右
右
))
))
)
按住[ E N A B L E ] 按钮的时间内,L 2 传送带继续供给动作。
L 2L 2
L 2L 2
L 2
传送带传送带
传送带传送带
传送带
((
((
(
右右
右右
右→
左左
左左
左
))
))
)
按住[ E N A B L E ] 按钮的时间内,L 2 传送带继续排出动作。
R 1R 1
R 1R 1
R 1
传送带传送带
传送带传送带
传送带
((
((
(
右右
右右
右→
左左
左左
左
))
))
)
按住[ E N A B L E ] 按钮的时间内,R 1 传送带继续供给动作。
R 1R 1
R 1R 1
R 1
传送带传送带
传送带传送带
传送带
((
((
(
左左
左左
左→
右右
右右
右
))
))
)
按住[ E N A B L E ] 按钮的时间内,R 1 传送带继续排出动作。
R 2R 2
R 2R 2
R 2
传送带传送带
传送带传送带
传送带
((
((
(
右右
右右
右→
左左
左左
左
))
))
)
按住[ E N A B L E ] 按钮的时间内,R 2 传送带继续供给动作。
R 2R 2
R 2R 2
R 2
传送带传送带
传送带传送带
传送带
((
((
(
左左
左左
左→
右右
右右
右
))
))
)
按住[ E N A B L E ] 按钮的时间内,R 2 传送带继续排出动作。
X YX Y
X YX Y
X Y
工作台滑道升工作台滑道升
工作台滑道升工作台滑道升
工作台滑道升
//
//
/
降降
降降
降
进行 X Y 工作台滑道的上升或下降动作。
X YX Y
X YX Y
X Y
工作台滑道工作台滑道
工作台滑道工作台滑道
工作台滑道
( L( L
( L( L
( L →
R )R )
R )R )
R )
按住[ E N A B L E ] 按钮的时间内,X Y 工作台滑道从左向右搬送
线路板 。
X YX Y
X YX Y
X Y
工作台滑道工作台滑道
工作台滑道工作台滑道
工作台滑道
( R( R
( R( R
( R →
L )L )
L )L )
L )
按住[ E N A B L E ] 按钮的时间内,X Y 工作台滑道从右向左搬送
线路板 。
2 . 22 . 2
2 . 22 . 2
2 . 2 “
手动操作手动操作
手动操作手动操作
手动操作 ”
T a bT a b
T a bT a b
T a b
0308-001 6-13