SM482(L)_PLUS_Admin(Chi_Ver2.4).pdf - 第414页
14-68 Multi-Functional Placer SM482(L) PLUS Administrator’s Guide 14.3.7.9. Fly to Fix Camera & Fly Runout Offset Calibration 为了补偿在飞行相机部件识别后贴装时因部件识别高度和贴装高度不同而发生的偏 移。 此时发生的 Of fset 的原因为轴的弯曲、 Run-Out 等。 与贴装高度相同的基准相机的识 …
14-67
Machine Calibration
10. 结果值在System Setup菜单的Camera对话框中可以确认。
备 注 Fly Camera Offset 的校正基准值如下。 (FOV 25 MEGA) [单位:
X(mm) , Y (mm) , R (°) ]
Offset X: -0.60 ~ 0.60
Offset Y: -0.60 ~ 0.60
Offset R: -1.0 ~ 1.0
Head Reference Fiducial Offset 的校正基准值如下。 (FOV 25
MEGA) [单位: X(mm) , Y (mm) ]
Offset X: -0.50 ~ 0.50
Offset Y: -0.50 ~ 0.50
14-68
Multi-Functional Placer SM482(L) PLUS Administrator’s Guide
14.3.7.9. Fly to Fix Camera & Fly Runout Offset Calibration
为了补偿在飞行相机部件识别后贴装时因部件识别高度和贴装高度不同而发生的偏
移。
此时发生的Offset的原因为轴的弯曲、 Run-Out等。与贴装高度相同的基准相机的识
别高度和飞行相机的识别高度值,根据角度进行补正。
为了执行此Calibration先要进行‘Fly-Camera Offset Calibration’, ‘Fix-Camera Scale
Calibration’, ‘Head Offset Calibration’,同时要使用CNT20吸嘴。
下面是 Fly to Fix Offset 的校正步骤。
1. 点击<准备吸嘴>按钮,在ANC1号孔中插入CNT20吸嘴。
2. 选择<自动下一步> 校验框后,点击<14. Fly to Fix Offset> 按钮,则对选择的
Gantry自动执行校正。
选择<没有实际运动(手动)> 校验框后,执行校正会在各Head手动插入吸嘴,
并点击<下个>进入下一个阶段。
不选<自动下一步> 或<没有实际运动(手动)>中的任何校验框的状态下执行
校正时,虽然对当前被选的Head自动更换吸嘴,但要点击<下个>按钮才能执行
下一个阶段。
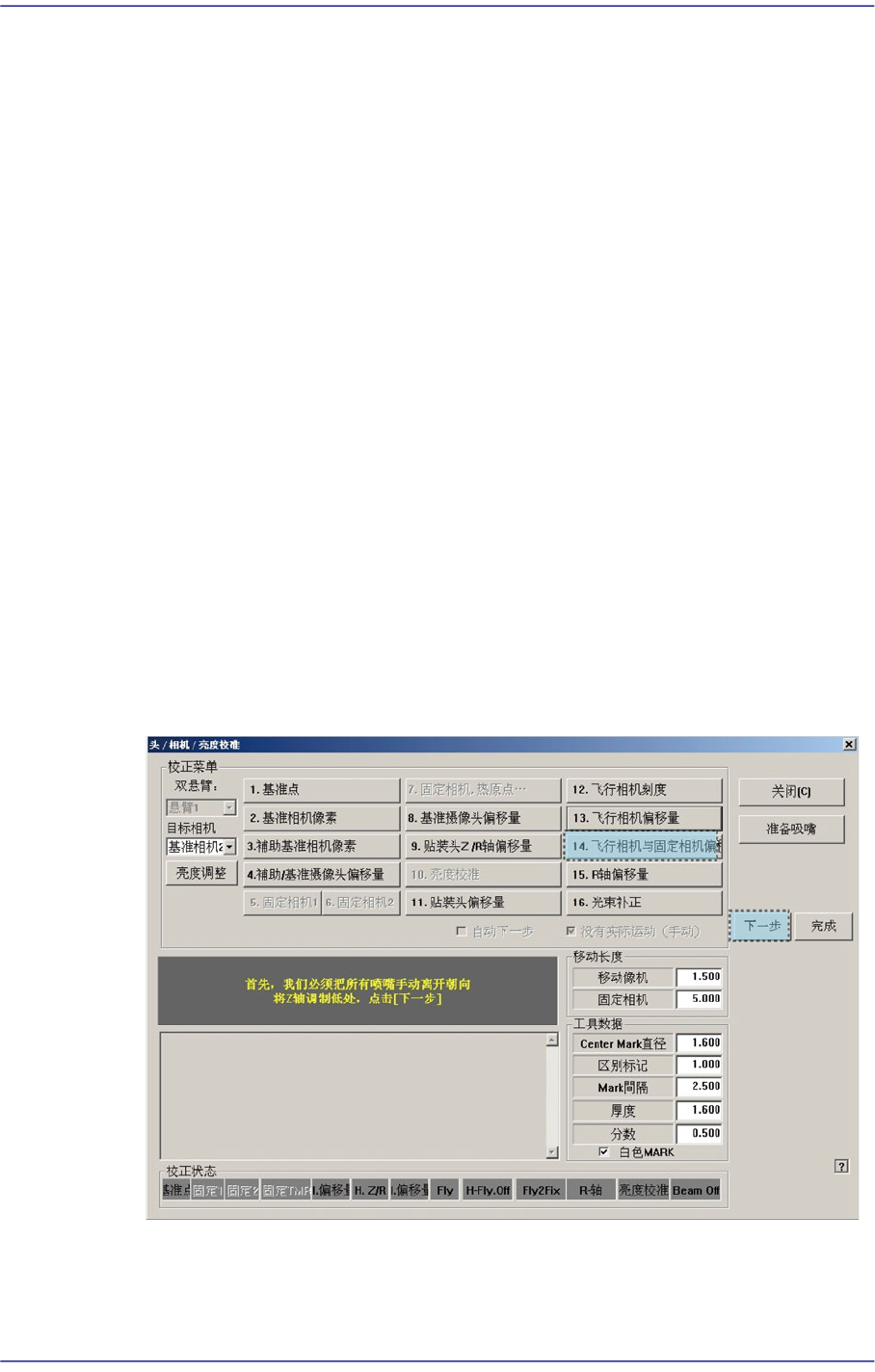
选择<14. Fly to Fix Offset>按钮则显示”首先,我们必须把所有吸嘴手动离开朝
向。将Z轴调制低处,点击[下一步].” 消息。为了手动除去所有贴装在磁头的吸
嘴,拉下Z轴请点击<下个>按钮。
3. 那么, Head Assembly移动到设备指定的位置后拉下所有Z轴。此时,请手动除去
所有已贴装的吸嘴。

14-69
Machine Calibration
4. 显示“下一步,将标准工具粘贴在头部1。点击[下一步]向下移动。移动后,手动
粘贴工具到首部。” 消息。在磁头1号的吸嘴支架上手动安装 CNT20吸嘴后点击
<下个>按钮。
5. 显示“移动到中心位置[固定1]摄像。移动,点击[下一步]。”. 为了Head
Assembly移动到 固定相机1的中心请点击<下个>按钮。此时在 <目标摄像>组
合框中选择 “固定相机1”点击<亮度>按钮,在 “亮度控制” 对话框中SMVision
窗显示的 CNT20吸嘴后点击上的 Ficucial Mark明显为止调整照明亮度。
6. 显示 “排列高度上升,镜像关闭移动,点击[下一步]” 消息。 请点击<下个>按
钮。
7. 那么, Head 1上升到飞行相机的 Align 高度,关闭 Mirror。还有在消息窗显示“准
备标准。对于标准,点击[下一步]” 消息 。 此时点击<亮度>后在 “亮度控制”
对话框中 SMVision窗显示的CNT20吸嘴上的 Fiducial Mark明显为止调整照明
亮度后点击<下个>按钮。
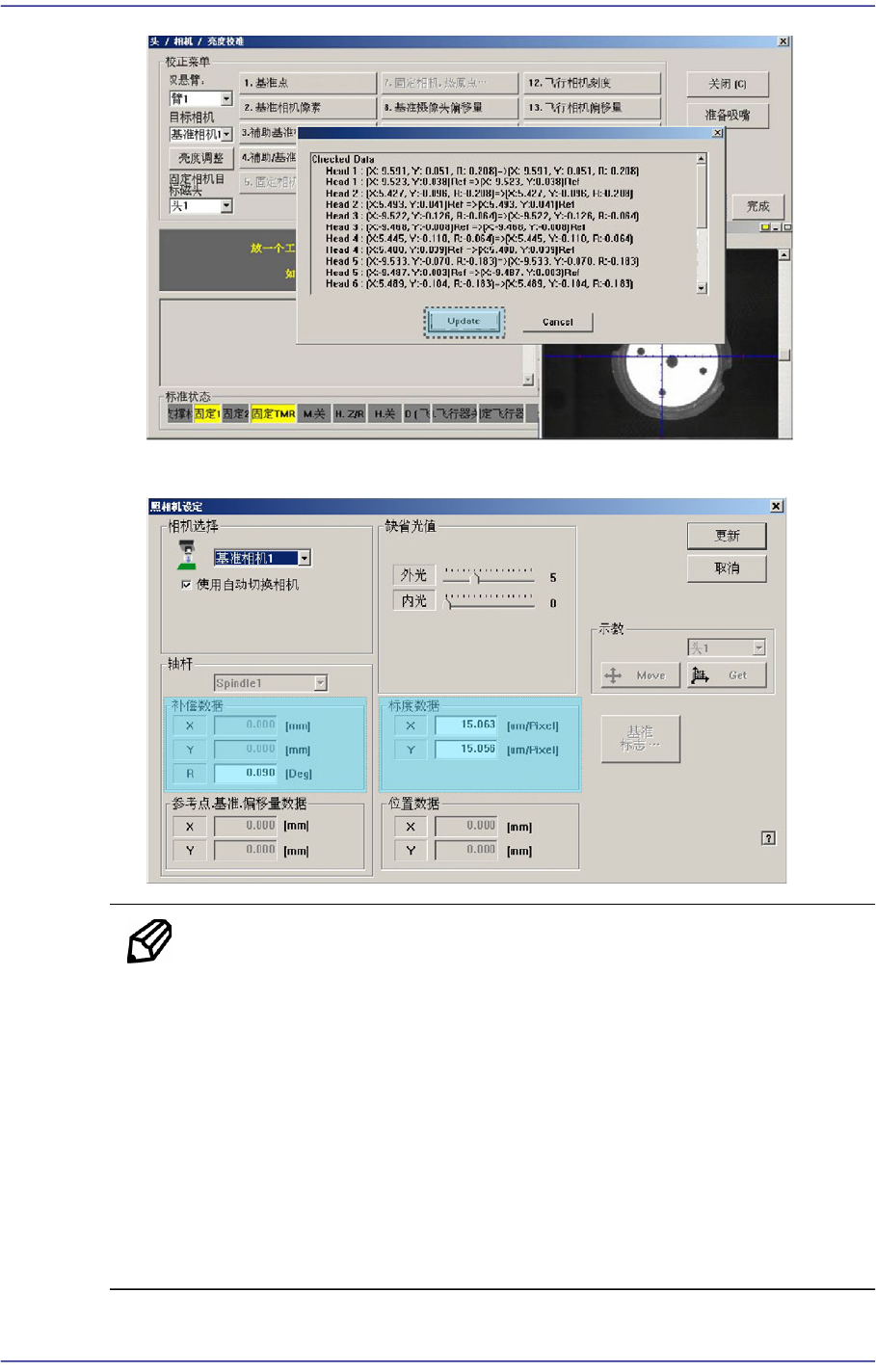
8. 自动执行校正后。结束校正则如下图显示结果值。
9. 请按照对磁头1的校正方法,从Head 2~6号执行校正。
10. 对所有磁头正常完成 Calibration 次序,则如下图显示结果值。 要在设备中适用
校正值请点击<确定>按钮。