00195439-05-SG_D-Serie_FSE-DE.pdf - 第111页
7 Achsdynamik 7.1 Grundsätzliches zur Achsdynamik Student Guide SIPLACE D-Serie (FSE) 111 Die dann noch auftretenden Bewegungen von ca. 6 µm können ignori ert werden. Diese wirken sich nicht auf die Maschine oder d ie Be…
7 Achsdynamik
7.1 Grundsätzliches zur Achsdynamik
110 Student Guide SIPLACE D-Serie (FSE)
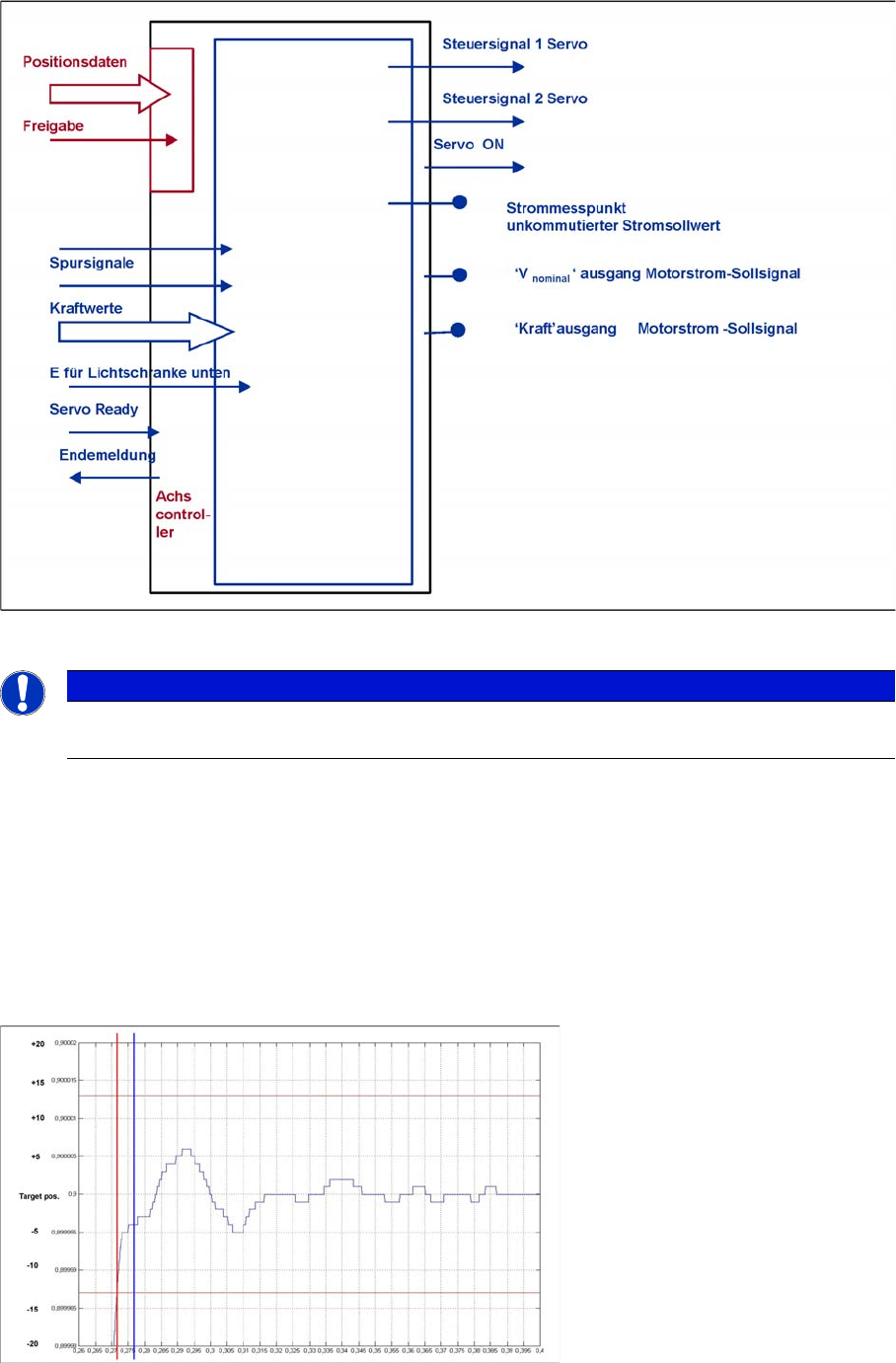
Digital gesteuerte Achse mit A364 der SIPLACE-Maschinen
Bei der 1. Positionierung in die Zielposition triggert das Istposition-gleich-Sollpositionssignal die
Überschwingzählung des SIPLACE Axis Testers für das Positionsabweichungssignal.
Wäre die Überschwingung größer als die erlaubte Positionsabweichung (13 Digit) dieser Achse würde
die Endemeldung verzögert bis die Abweichung durch einen Regelvorgang innerhalb des erlaubten Be
-
reiches bleibt.
Kommt die Achse der Zielposition der erlaubten Zielposition nahe, so werden Achsparameter genutzt,
welche kaum zu Überschwingungen neigen. Diese effektive und sehr schnelle Regelungsmöglichkeit
zeigt selten Schwingneigungen und weißt verkürzte Wartezeiten für Überschwingüberprüfungen von
5ms auf.
Die Überschwingung oben zeigt, dass bei 13 Digit vor Zielbereich die Wartezeit für die
Überschwingprüfung gestartet und nach 5 ms die Endemeldung gesetzt wird.
HINWEIS
Das Positionsabweichungssignal zeigt die Positionierqualität jeder Achsbewegung in die Ziel
-
position.
7 Achsdynamik
7.1 Grundsätzliches zur Achsdynamik
Student Guide SIPLACE D-Serie (FSE) 111
Die dann noch auftretenden Bewegungen von ca. 6 µm können ignoriert werden. Diese wirken sich nicht
auf die Maschine oder die Bestückung aus.
Für die Achsdynamik-Beurteilung durch einen Servicetechniker wurde ein unkommutiertes Stromsollsi
-
gnal aller Motorstrom-Sollsignale geschaffen. Dieses Signal gibt Auskunft über die mechanische Rei
-
bung im Achssystem. Es kann an der Adapterkarte des Achscontrollers oder am Vreg-Ausgang des
SIPLACE-AxisTester (SAT) gemessen werden.
Das unkommutierte Stromsollsignal ist ein Hüllkurvensignal der 2 sichtbaren Motorstrom-Sollsignale des
Achscontrollers. Das 3. nicht sichtbare Motorstrom-Sollsignal wird auf dem Servoverstärkerboard be
-
rechnet.
Das bekannte V nominal (Vsoll) Geschwindigkeitssignal und das Force-Kraftsignal wurden durch Motor
-
strom-Sollsignale für DC- bzw. AC-Antriebe ersetzt.
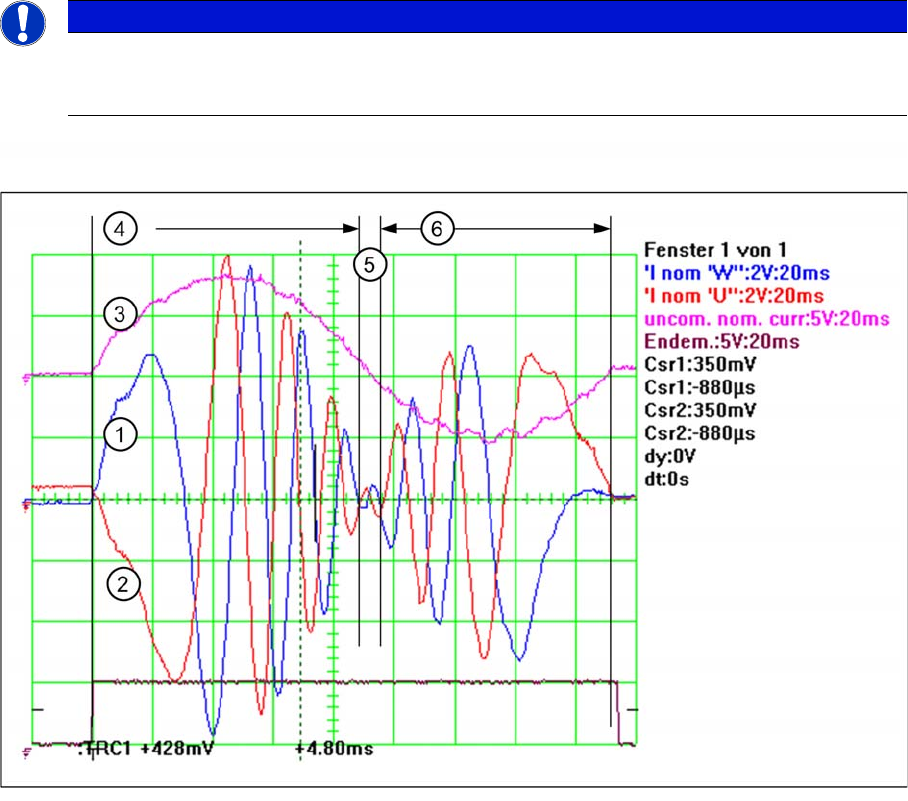
Das unkommutierte Motorstromsollsignal (3) und die Motorstromsignale (1) (2) eines AC-Motors
Den Abschnitt Beschleunigung erkennt man am Motorstrom-Sollsignal des AC-Motors (4) aufgrund der
hohen Amplituden um die Achsmechanik mit genügend Kraft zu versorgen. Die Frequenz dieses Signal
-
abschnitts ist wegen der geringen Geschwindigkeit niedrig. Die Amplitude wird kleiner weil mit steigen
-
der Geschwindigkeit die Beschleunigung und damit die Motorkraft sinkt.
Die Frequenz wird mit steigender Geschwindigkeit höher bis zur maximal Frequenz für maximal Ge
-
schwindigkeit der Achse (5).
Im Verzögerungsabschnitt steigt die Amplitude wieder um die Geschwindigkeit der Achsmechanik zu re
-
duzieren. Die Frequenz wird niedriger, damit sinkt auch die Geschwindigkeit der Achse (6) ab. Als
abschließender Vorgang wird mit Überschwingkontrolle die Achse in die korrekte Zielposition bewegt.
HINWEIS
Diese Motorstromsignale können an dem V nominal- und dem Force-Ausgang des AchsTes
-
ters gemessen werden. Die gleichen Signale werden an den zwei obersten Testpunkten an der
Servoverstärkerplatine als Inom. U’ und Inom. W gemessen.
7 Achsdynamik
7.2 Positionsmesssystem 7.2.1 Spursignale und Nullimpulssignal der Achse
112 Student Guide SIPLACE D-Serie (FSE)
Obwohl es keine Einstellmöglichkeiten am Servo gibt soll die Achsdynamik überprüft werden. Jede Ach
-
se hat eine Reibung zu überwinden, je höher diese Reibung desto höher die Amplituden bei Beschleu
-
nigung und konstanter Geschwindigkeit. Die höhere Motorkraft bei Beschleunigung und konstanter
Geschwindigkeit kann am unkommutierten Motorstrom-Sollsignal erkannt werden. Eine höhere Reibung
reduziert die nötige Motorkraft während des Verzögerungsabschnitts, so ist die Amplitude des unkom
-
mutierten Motorstrom-Sollsignals kleiner.
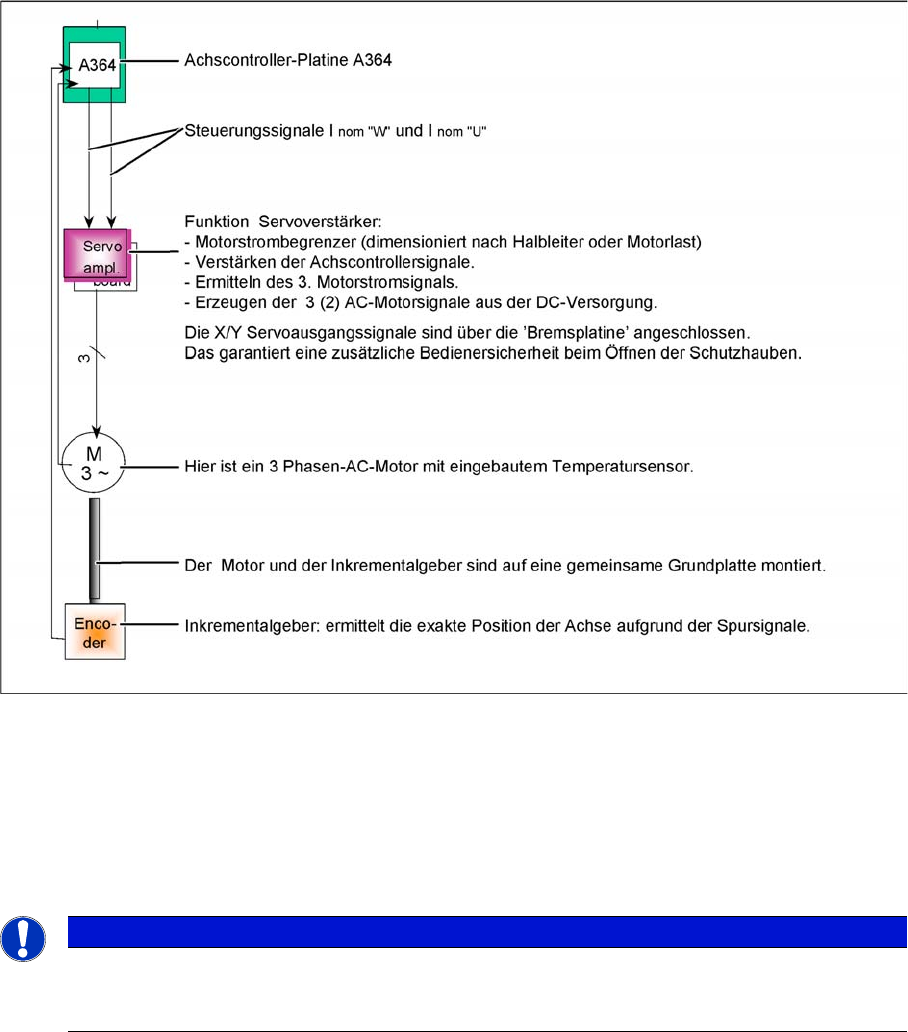
Achsblockdiagramm am Beispiel X- oder Y-Achse der SIPLACE X-Maschine
Die unterschiedlichen Achstypen unterscheiden sich in Details, aber alle Steueraufgaben werden durch
den Achscontroller ausgeführt. Zwei Steuersignale für 2- oder 3
-
Phasen-Achsantriebe werden als Steu
-
ersignale an den Servo übertragen. Für DC-Antriebe nutzen wir die gleiche Hardwareprinzipschaltung
mit nur einem Steuersignal zum Servoverstärker. Die einzige Rückkopplung sind die Spursignale vom
Inkrementalgeber zum Achscontroller – ein verfügbarer Tacho (Z-/DP-Achse) wird nicht an das Achs
-
system angeschlossen.
Sehen Sie dazu auch...
7.1 Grundsätzliches zur Achsdynamik [ ➙ 109]
7.2
7.2 Positionsmesssystem
Positionsmesssystem
7.2.1
7.2.1 Spursignale und Nullimpulssignal der Achse
Spursignale und Nullimpulssignal der Achse
Die Achssysteme bestehen aus folgenden Teilen.
HINWEIS
Bei mechanischen oder elektrischen Fehlern wird durch die Qualität des A364-Achscontrollers
ein Fehlerzustand durch längere Positionierzeiten oder Signalveränderungen erst bei massi
-
ven Abweichungen sichtbar.