00195439-05-SG_D-Serie_FSE-DE.pdf - 第247页
14 SITEST 14.3.2 BE-Kamera 14.3 Grundsätzlic he Erläuterung aller Kalibrier schritte Student Guide SIPLACE D-Serie (FSE) 247 Ablauf für Segment-Offset oben (I): Prinzipzeichnung des Kalib rierte ils unter der Kamera in 0…
14 SITEST
14.3 Grundsätzliche Erläuterung aller Kalibrierschritte 14.3.1 Verfahrbereich
246 Student Guide SIPLACE D-Serie (FSE)
14.3
14.3 Grundsätzliche Erläuterung aller Kalibrierschritte
Grundsätzliche Erläuterung aller Kalibrierschritte
14.3.1
14.3.1 Verfahrbereich
Verfahrbereich
14.3.1.1
14.3.1.1 Kalibrierteilposition
Kalibrierteilposition
▪ Kalibrierung der X- und Y-Abholposition des Kalibrierteils.
14.3.2
14.3.2 BE-Kamera
BE-Kamera
▪ Die Berechnung erfolgt unter Einbeziehung der Ax/Bx/Cx/Ay/By/Cy-Kalibrierwerte. Die Daten wer
-
den gesichert unter: camera.xml als: XU_Pixel / YU_Pixel in nm
▪ Die Pixelgröße ist:
ca.49700 nm bei BE-camera SST 28 (für 12er-Kopf)
ca. 26760 nm bei BE-Kamera SST 29 (für 6er-Kopf/12er-Kopf Option)
ca. 17220 nm bei BE-Kamera SST 23 (für 20er-Kopf)
▪ Der Kameramittelpunkt wird bestimmt.
▪ Der Verdrehwinkel des CCD-Sensors in der LP-Kamera gegenüber der Drehebene des Sterns wird
ermittelt. Der Wert wird als Kamera_winkel im Datenblock der BE-Kamera in camera.xml gesichert.
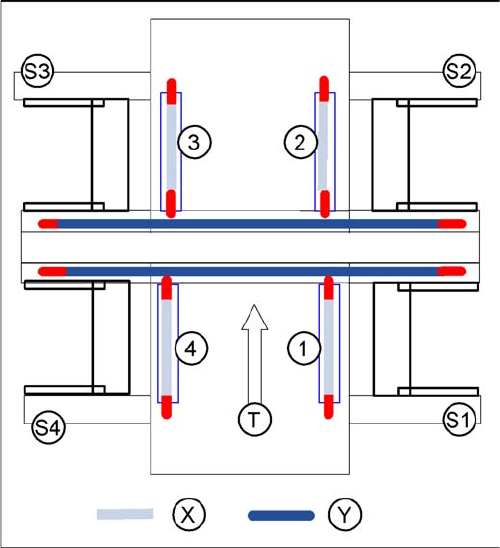
X-Portalachse:
▪ Die X-Portalachse verfährt zum Nullimpuls zur Kalib
-
rierung des Verfahrbereiches und anschließend zu
den HW-Endstoppern (Endschalter). Dort wird die je
-
weilige Position der Portalachse aufgenommen.
▪ 1,5 mm vor dem Puffer wird der maximale Hardware-
Verfahrbereich gesetzt. 0,5 mm davor ist der jeweili
-
ge Software-Verfahrbereichswert.
Y-Portalachse:
▪ Die Y-Portalachse verfährt zum Nullimpuls zur Kalib
-
rierung des Verfahrbereiches und anschließend zu
den links oder rechts außen liegenden HW-Endstop
-
pern (Endschalter). Dort wird die jeweilige Position
der Portalachse aufgenommen.
▪ 1,5 mm vor dieser Position wird der maximale Hard
-
ware-Verfahrbereich gesetzt. 1,5 mm davor ist der je
-
weilige Software-Verfahrbereichswert.
▪ Bei den Y-Achsen werden nur die jeweils äußeren
HW-Endstopper angefahren. Das andere Verfahrbe
-
reichsende wird errechnet. Dies ergibt einen Verfahr
-
bereichsabstand zum anderen Portal von ca. 35 mm.
Legende
▪ 1-4: Portal 1 - 4
▪ S1 - S4: Sektor 1 - 4
▪ X: Verfahrbereich X
▪ Y: Verfahrbereich Y
▪ T: Transportrichtung
14 SITEST
14.3.2 BE-Kamera 14.3 Grundsätzliche Erläuterung aller Kalibrierschritte
Student Guide SIPLACE D-Serie (FSE) 247
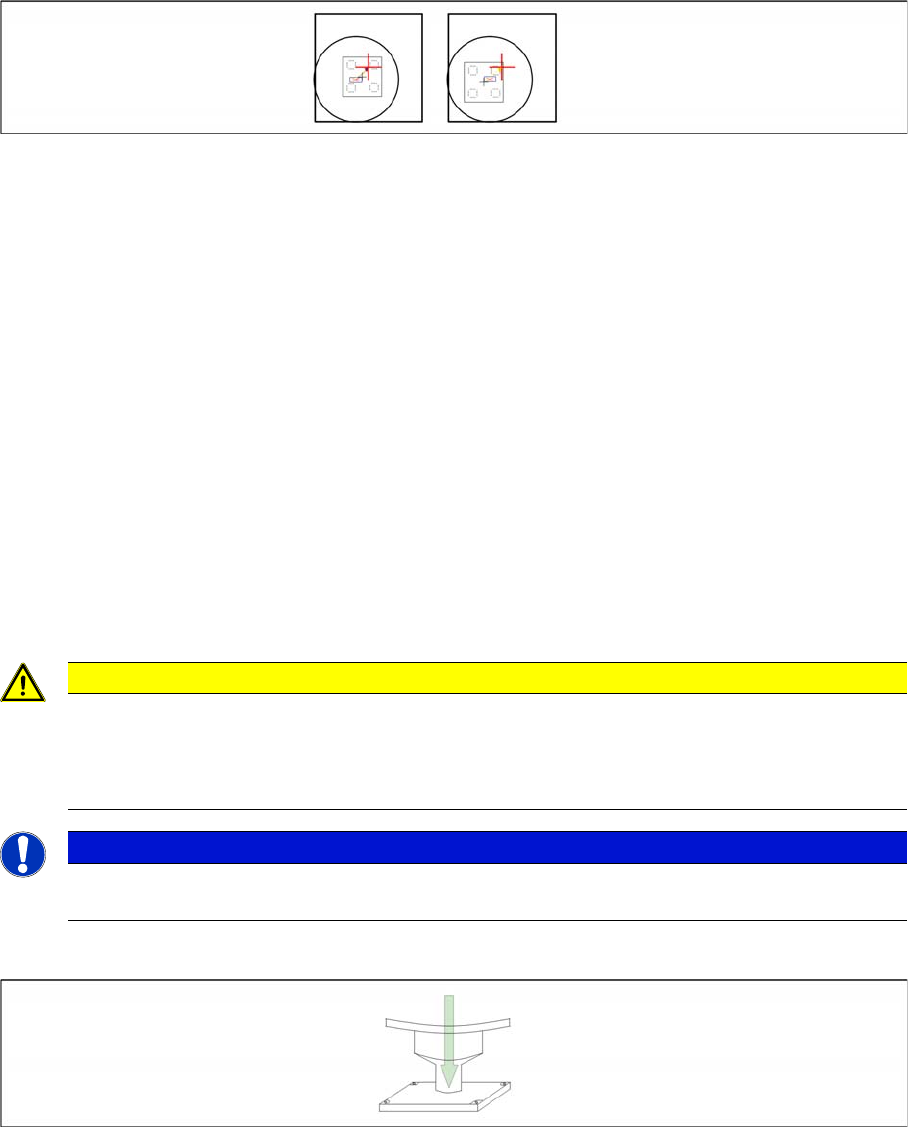
Ablauf für Segment-Offset oben (I):
Prinzipzeichnung des Kalibrierteils unter der Kamera in 0° (links); in 180°(rechts).
LP-Kamera - BE-Kamera-Offset:
▪ Bei der Messung des Segment-Offsets oben (I) erfolgt die Kalibrierung des LP-Kamera -> BE-Ka
-
mera-Offset mit Segment 1:
▪ Der Abstand der Kameramitten in X- und Y-Richtung wird in µm berechnet.
▪ Der Segment-Offset oben (I) wird mit einem errechneten Mittelwert verglichen. (Daher ist der Seg
-
ment-Offset I von Segment 1 nicht mehr 0.)
▪ Für die Berechnung des Offsets (I und II) ist Segment 1 der Bezugspunkt.
▪ Dieser Abstand wird gespeichert in der REAL.MA unter ‘Kopfoffsets’ bei Kopf 1 Kopfoffset_X /..Y.
Der Segment-Offset unten (II) für Segment 1 ist 0 (siehe unten).
▪ Die Segment-Offsets der übrigen 11 Segmente werden in der Datei PIP_OFF.MA gesichert (als Ab
-
weichung zu Segment 1).
▪ Die Abweichung in X- und Y-Richtung der Drehachse der Segmente gegenüber Segment 1 (in µm).
▪ Die Messung wird jeweils unter 0° und 180° bzw. 90° und 270° durchgeführt. Aus den Werten 0/180°
bzw. 90/270° wird der Mittelpunkt des Segments bestimmt.
▪ Die Werte für den Segment-Offset werden in der Datei PIP_OFF.MA gespeichert.
Ablauf für Segment-Offset unten (II):
Ablauf für ein Segment
▪ nach Abschluss der Kalibrierschrittes Segment-Offset oben (I) startet der Kalibrierschritt Ablauf für
Segment-Offset unten (II) C&P DLM 3:
▪ das Kalibrierteil wird mit der Pipette unter 0° abgeholt, optisch zentriert und bestückt. Mit der LP-Ka
-
mera wird anschließend die exakte Position ermittelt (in µm).
▪ das Kalibrierteil wird mit der Pipette unter 90° abgeholt, optisch zentriert und bestückt. Mit der LP-
Kamera wird anschließend die exakte Position ermittelt (in µm).
▪ das Kalibrierteil wird mit der Pipette unter 180° abgeholt, optisch zentriert und bestückt. Mit der LP-
Kamera wird anschließend die exakte Position ermittelt (in µm).
VORSICHT
Für Segment-Offset I (oben) darf der Wert für die Standardabweichung 600 µm nicht
überschreiten. Die Differenz zwischen den Segmenten darf +/- 150 µm nicht überschreiten.
Segment-Offset II (unten) absoluter Grenzwert +/- 150 µm und Differenz der Werte max. +/-
150 µm.
HINWEIS
Segment-Offset II ist für das erste Segment immer 0. Das erste Segment ist die Referenz für
die übrigen Segmente.
14 SITEST
14.3 Grundsätzliche Erläuterung aller Kalibrierschritte 14.3.3 Pipettenwechsler (C&P-Kopf)
248 Student Guide SIPLACE D-Serie (FSE)
▪ das Kalibrierteil wird mit der Pipette unter 270° abgeholt, optisch zentriert und bestückt. Mit der LP-
Kamera wird anschließend die exakte Position ermittelt (in µm).
Dieser Ablauf wird ein zweites Mal wiederholt. Aus den 8 Bestückpositionen wird der Mittelwert ermittelt.
Die Abweichung zur Soll-Bestückposition wird als Segment-Offset unten (II) eingetragen.
14.3.3
14.3.3 Pipettenwechsler (C&P-Kopf)
Pipettenwechsler (C&P-Kopf)
▪ Jedes Pipettenmagazin besitzt eine Passmarke (Bohrung), die zu Beginn des Kalibrierablaufs an
-
gefahren und erkannt werden.
▪ optional kann nun die Abholhöhe des Pipettenwechslers kalibriert werden.
▪ optional kann nun die Abwurfposition des Pipettenwechslers kalibriert werden. Diese Position wird
im Betrieb beim Abwerfen defekter Pipetten angefahren.
14.3.4
14.3.4 Kalibrieren und Teachen von Positionen
Kalibrieren und Teachen von Positionen
Das Teach-Menü ist eine neue Funktion zur Kalibrierung der Positionen. Auf diese Weise kann die kor
-
rekte Position vor dem Kalibrieren geteacht werden.
14.3.4.1
14.3.4.1 Transportwangen
Transportwangen
Für das neue modulare Transportsystem ist diese Kalibrierfunktion notwendig.
Beim modularen Transport sind alle Transportwangen einstellbar. Zur Einstellung der Transportwangen
wird ein Schrittmotor eingesetzt, der über einen Zahnriemen die Stelleinheit antreibt. Die Position der
Transportwangen wird über einen BERO erkannt, daher gibt es nun für jede Transportwange einen
Schaltpunkt. Mit der Kalibrierung werden die Schaltpunkte für den gesamten Verfahrbereich der Brei
-
tenverstellung optimiert. Die Kalibrierung ist notwendig, um sicherzustellen, dass alle zwei Stellantriebe
die Transportwangen parallel verschieben.
Automatischer Ablauf (Transport Mapping):
▪ Der Stellantrieb wird initialisiert und bewegt die Transportwange zur rechten (Endschalter)
▪ Der Stellantrieb erkennt die feste(n) Transportwange(n) (zwei beim Doppeltransport) und verfährt
die einstellbare(n) Transportwange(n) in die Standardposition von 55 mm und vermisst die einge
-
stellte Position sehr genau.
▪ Der Stellantrieb verfährt die Transportwange(n) schrittweise (10 mm Schritte) und bestimmt den Off
-
set der Schaltpunkte der BEROs in den zwei Stellantrieben für die verschiedenen Transportwangen
-
positionen.
▪ Diese Kalibrierung erfolgt von links nach rechts und zurück.
▪ Die Ergebnisse werden als Korrekturwerte auf der TSP 301 (TSP 201) gespeichert und beim Ein
-
stellen und Messen der Transportbreite berücksichtigt.
14.3.4.2
14.3.4.2 Transportbreite kalibrieren
Transportbreite kalibrieren
Der Offset der Transportbreite kann mit einer beliebig breiten LP bestimmt werden. Diese Breite muss
vom Bediener eingegeben werden. Damit wird sichergestellt, dass bei verschiedenen Transportbreiten
eine def. Toleranz (Offset) zwischen den Transportwangen besteht und ein Verklemmen der Leiterplatte
verhindert wird.
14.3.4.3
14.3.4.3 LP-Referenz-Ecke
LP-Referenz-Ecke
► Wählen Sie die Transportspur aus.
► Wählen Sie LP-Referenz-Ecke rechts oder links - nur bei Doppeltransport.
VORSICHT
Vor dem Starten der Kalibrierung des Pipettenwechslers sollte die Konfiguration des Pipetten
-
wechslers und der Füllstand überprüft werden.
HINWEIS
Die Kalibrierung muss für Spur 1 und Spur 2 durchgeführt werden.