00195439-05-SG_D-Serie_FSE-DE.pdf - 第246页
14 SITEST 14.3 Grundsätzliche Erläuterung aller Kalibrierschritte 14.3.1 V erfahrbereich 246 Student Guide SIPLACE D-Serie (F SE) 14.3 1 4 . 3 G r u n d s ä t z lic h e E r lä u t e r u n g a lle r K a lib r ie r s c h r…
14 SITEST
14.2.3 C&P-Kopf 14.2 Kalibrierung
Student Guide SIPLACE D-Serie (FSE) 245
14.2.3
14.2.3 C&P-Kopf
C&P-Kopf
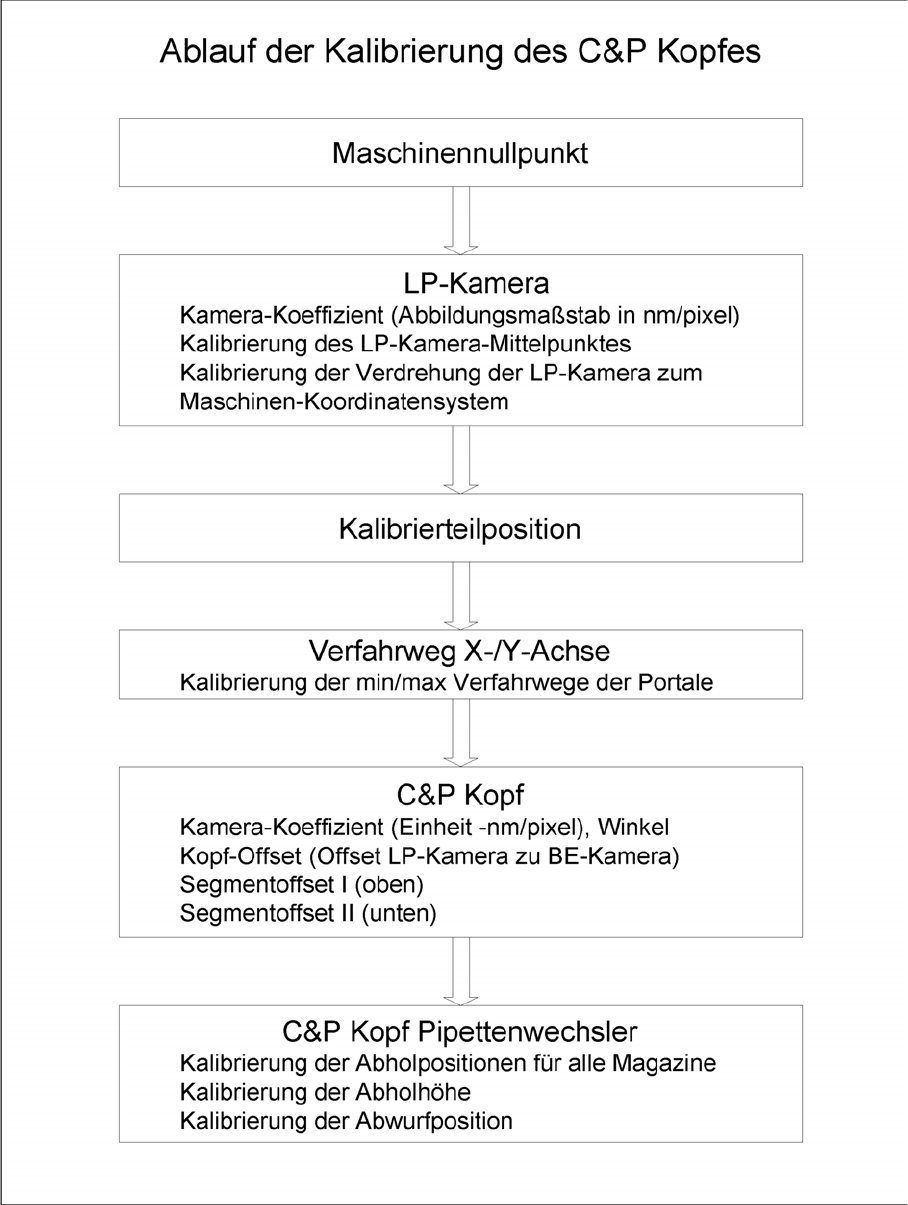
Ablauf der C&P-Kopf-Kalibrierung
14 SITEST
14.3 Grundsätzliche Erläuterung aller Kalibrierschritte 14.3.1 Verfahrbereich
246 Student Guide SIPLACE D-Serie (FSE)
14.3
14.3 Grundsätzliche Erläuterung aller Kalibrierschritte
Grundsätzliche Erläuterung aller Kalibrierschritte
14.3.1
14.3.1 Verfahrbereich
Verfahrbereich
14.3.1.1
14.3.1.1 Kalibrierteilposition
Kalibrierteilposition
▪ Kalibrierung der X- und Y-Abholposition des Kalibrierteils.
14.3.2
14.3.2 BE-Kamera
BE-Kamera
▪ Die Berechnung erfolgt unter Einbeziehung der Ax/Bx/Cx/Ay/By/Cy-Kalibrierwerte. Die Daten wer
-
den gesichert unter: camera.xml als: XU_Pixel / YU_Pixel in nm
▪ Die Pixelgröße ist:
ca.49700 nm bei BE-camera SST 28 (für 12er-Kopf)
ca. 26760 nm bei BE-Kamera SST 29 (für 6er-Kopf/12er-Kopf Option)
ca. 17220 nm bei BE-Kamera SST 23 (für 20er-Kopf)
▪ Der Kameramittelpunkt wird bestimmt.
▪ Der Verdrehwinkel des CCD-Sensors in der LP-Kamera gegenüber der Drehebene des Sterns wird
ermittelt. Der Wert wird als Kamera_winkel im Datenblock der BE-Kamera in camera.xml gesichert.
X-Portalachse:
▪ Die X-Portalachse verfährt zum Nullimpuls zur Kalib
-
rierung des Verfahrbereiches und anschließend zu
den HW-Endstoppern (Endschalter). Dort wird die je
-
weilige Position der Portalachse aufgenommen.
▪ 1,5 mm vor dem Puffer wird der maximale Hardware-
Verfahrbereich gesetzt. 0,5 mm davor ist der jeweili
-
ge Software-Verfahrbereichswert.
Y-Portalachse:
▪ Die Y-Portalachse verfährt zum Nullimpuls zur Kalib
-
rierung des Verfahrbereiches und anschließend zu
den links oder rechts außen liegenden HW-Endstop
-
pern (Endschalter). Dort wird die jeweilige Position
der Portalachse aufgenommen.
▪ 1,5 mm vor dieser Position wird der maximale Hard
-
ware-Verfahrbereich gesetzt. 1,5 mm davor ist der je
-
weilige Software-Verfahrbereichswert.
▪ Bei den Y-Achsen werden nur die jeweils äußeren
HW-Endstopper angefahren. Das andere Verfahrbe
-
reichsende wird errechnet. Dies ergibt einen Verfahr
-
bereichsabstand zum anderen Portal von ca. 35 mm.
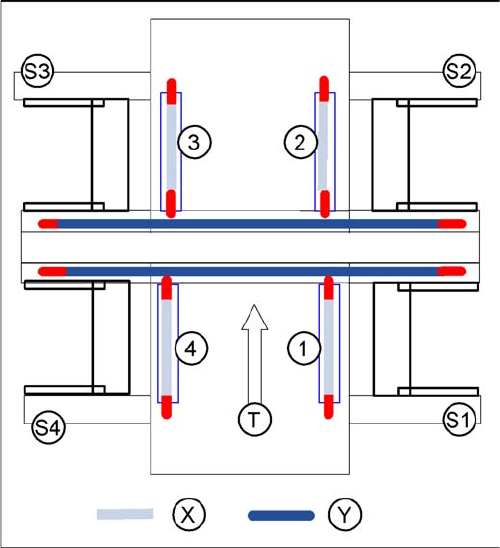
Legende
▪ 1-4: Portal 1 - 4
▪ S1 - S4: Sektor 1 - 4
▪ X: Verfahrbereich X
▪ Y: Verfahrbereich Y
▪ T: Transportrichtung
14 SITEST
14.3.2 BE-Kamera 14.3 Grundsätzliche Erläuterung aller Kalibrierschritte
Student Guide SIPLACE D-Serie (FSE) 247
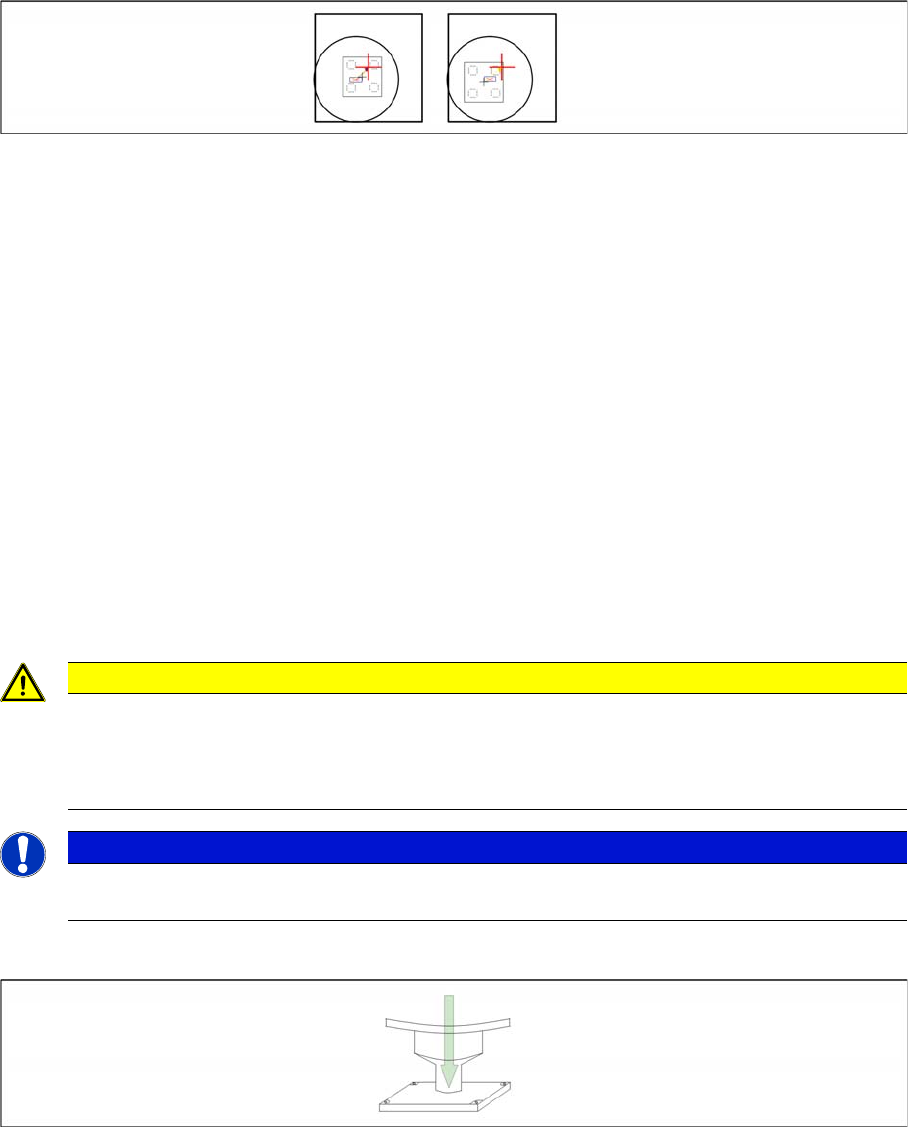
Ablauf für Segment-Offset oben (I):
Prinzipzeichnung des Kalibrierteils unter der Kamera in 0° (links); in 180°(rechts).
LP-Kamera - BE-Kamera-Offset:
▪ Bei der Messung des Segment-Offsets oben (I) erfolgt die Kalibrierung des LP-Kamera -> BE-Ka
-
mera-Offset mit Segment 1:
▪ Der Abstand der Kameramitten in X- und Y-Richtung wird in µm berechnet.
▪ Der Segment-Offset oben (I) wird mit einem errechneten Mittelwert verglichen. (Daher ist der Seg
-
ment-Offset I von Segment 1 nicht mehr 0.)
▪ Für die Berechnung des Offsets (I und II) ist Segment 1 der Bezugspunkt.
▪ Dieser Abstand wird gespeichert in der REAL.MA unter ‘Kopfoffsets’ bei Kopf 1 Kopfoffset_X /..Y.
Der Segment-Offset unten (II) für Segment 1 ist 0 (siehe unten).
▪ Die Segment-Offsets der übrigen 11 Segmente werden in der Datei PIP_OFF.MA gesichert (als Ab
-
weichung zu Segment 1).
▪ Die Abweichung in X- und Y-Richtung der Drehachse der Segmente gegenüber Segment 1 (in µm).
▪ Die Messung wird jeweils unter 0° und 180° bzw. 90° und 270° durchgeführt. Aus den Werten 0/180°
bzw. 90/270° wird der Mittelpunkt des Segments bestimmt.
▪ Die Werte für den Segment-Offset werden in der Datei PIP_OFF.MA gespeichert.
Ablauf für Segment-Offset unten (II):
Ablauf für ein Segment
▪ nach Abschluss der Kalibrierschrittes Segment-Offset oben (I) startet der Kalibrierschritt Ablauf für
Segment-Offset unten (II) C&P DLM 3:
▪ das Kalibrierteil wird mit der Pipette unter 0° abgeholt, optisch zentriert und bestückt. Mit der LP-Ka
-
mera wird anschließend die exakte Position ermittelt (in µm).
▪ das Kalibrierteil wird mit der Pipette unter 90° abgeholt, optisch zentriert und bestückt. Mit der LP-
Kamera wird anschließend die exakte Position ermittelt (in µm).
▪ das Kalibrierteil wird mit der Pipette unter 180° abgeholt, optisch zentriert und bestückt. Mit der LP-
Kamera wird anschließend die exakte Position ermittelt (in µm).
VORSICHT
Für Segment-Offset I (oben) darf der Wert für die Standardabweichung 600 µm nicht
überschreiten. Die Differenz zwischen den Segmenten darf +/- 150 µm nicht überschreiten.
Segment-Offset II (unten) absoluter Grenzwert +/- 150 µm und Differenz der Werte max. +/-
150 µm.
HINWEIS
Segment-Offset II ist für das erste Segment immer 0. Das erste Segment ist die Referenz für
die übrigen Segmente.